基于光流匀速远程操控树障清理机器人的设计与研究
2023-01-11 11:00毛唯物宋延辉陆文锋孙显酉朱和平
数字通信世界 2022年12期
毛唯物,宋延辉,陆文锋,孙显酉,朱和平
(国网江苏省电力有限公司建湖县供电分公司,江苏 建湖 224700)
0 引言
建湖县域内输电线路中存在大量分布于乡村郊区的线路,每年线路通道内都会生长大量的白杨树、竹柳树等生长周期短、树木体形大的树种,输电线路通道树障问题严重,导致安全距离不足,影响线路安全稳定运行,每年需要投入大量人力、财力对通道内树障进行砍伐清理。目前只有人工进行砍伐和修理一种方式,但由于在高压输电线路下工作,此操作较为危险,且由于人力限制,工作效率无法得到保证。目前急需一种更省时省力、更安全的输电线路通道树木清理方式来代替传统的人力砍伐树木方式[1]。
1 树障爬行机的设计研究
机器人替代人工作业,需要解决两方面的问题:一是自主行走,二是执行任务单元,两者缺一不可。多足仿生技术的输电线路树障清理机器人,同样需要解决这两方面的问题。为此我们研究了3种类型的多足仿生爬树方法。
(1)基于单摇臂爬树方法研究:该爬树方法的优点是结构设计简单,适合于便捷式工具产品;缺点是控制系统算法复杂,适应树木种类性差,爬行过程中存在坠落风险。
(2)基于毛毛虫爬树方法研究:该爬树方法的优点是树径适应范围大,带载能力强;缺点是爬行速度慢,爬行过程中存在坠落风险。
(3)基于蛇形爬树方法研究:该爬树方法的优点是采用节单元模块设计,可以根据使用树径自由拼装节数,“蛇头”采用快装方式,可以根据使用需求搭载不同种类传感器,爬行过程中无坠落风险;缺点是带载能力差,因而作为树障清理执行机器人无法搭载大功率切割设备。
综合以上爬树方法的优缺点,需要设计一种结构简单、带载能力强、爬行稳定可靠的爬行机器。为此,我们结合了毛毛虫的爬树方法与蛇形爬树方法的优缺点,设计出了一种“闭环螺旋攀爬树障清理机器人”。该方法爬行原理与蛇形爬树方法相似,采用了“阿基米德螺旋线运动学的机理”,但属于闭环爬行,通过多个爬行轮与树杆之间的弹力产生摩擦力,驱动负载能力较强,可以塔载大功率切割设备。设计的机器人体积不大于800 mm×800 mm×500 mm、模块化设计且单模块质量小于20 kg。设计的树障清理机器人可适配稍经100 mm、根经350 mm的树木种类,攀爬平台具备自动或遥控上下操作,具有防坠落功能。
2 树障清理的方法研究
研究一种便携式微小型化的电动线锯装置模块,安装在爬树机器人顶部,实现对树障的水平断尖、垂直修枝功能。该电动线锯清理装置主要包括上下机械手装置、推杆伸缩装置、抱树爬行转动装置、水平推进切割装置;其中,上下机械手装置、推杆伸缩装置与连接杆转动装置构成爬树行走系统,通过时序控制系统实现抱树上下爬行、抱树左右旋转;电动钢丝锯安装在电动万向头上,其线锯切割方向以水平面为基准可从不同角度进行切割。通过光电传感器技术获取机器人足与树干相对位置,并结合机器人携带摄像头获取的实时图像比对完成机器人在非视条件下一键自主行走功能。此外,通过传感器与图像数据比对结果,辅助操控人员进行手动操作[2]。
3 光流传感器的研究
树障清理机器人视觉是通过光学装置和非接触式的传感器自动接收并处理真实物体图像信息,并通过分析获得所需要信息或用于控制机器人自身运动的装置。视觉控制以实现对机器人控制为目的进行图像的自动获取与分析,因此它是利用机器视觉的原理,对直接得到的图像反馈信息快速进行图像处理,在尽量短的时间内给出反馈信息,调整树障清理机器人的位置和姿态。光流法作为计算机视觉高级功能的一种基本方法,已经成功运用在图像识别、目标追踪、图像编码、运动分析很多领域。
树障清理机器人采用阿基米德螺旋线运动学的机理爬行。作业对象树木上细下粗,爬行过程如不对树杆切线方向速度进行均速控制,则会出现沿树杆直径方向不均匀的角速度。不均匀的角速度会行成不同的向心力,向心力改变会影响行走轮上压力改变,从而影响爬行摩擦力。因此,需要对爬行速度进行测量,通常采用加速度计、陀螺仪、电磁罗盘等传感器进行测量,根据传感器的测量值的积分得到移动机器人的位置和姿态信息。其中,加速度计的测量值需要通过两次积分才能得到机器人的位置信息,对温度漂移敏感,并且一旦加速度的倾角超过0.5°,测量误差将非常大,故只能应用在比较平缓的路面。相比与加速度计,陀螺仪提供的航向信息更加准确,但是它的测量值是角速度,必须通过一次积分才能得到航向信息,因此,静态偏差漂移会带来很大的误差。电子罗盘可以直接获得机器人的航向信息,但是在城市街道、室内等有较多电磁干扰的环境中有较大的干扰,不适合电子干扰比较强的区域。
4 电机匀速驱动的设计研究
电机驱动是自主行走的技术核心,该系统主要由以下四部分组成:动力电源系统、四组轮毂电机、光流传感器、采集驱动通信单元。采集通信驱动单元在驱动牵引电机的同时,实时地对轮毂电机力矩、速度进行采集。
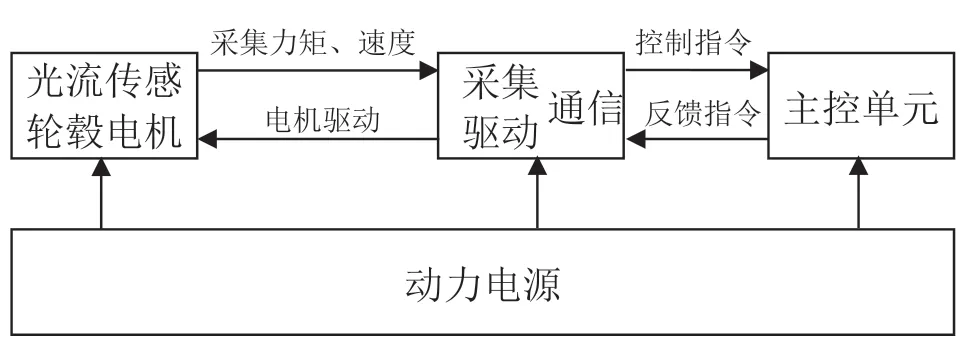
图1 电机驱动系统功能框架图
作为自主行走装置,如果在树径发生变化时,会出现电机堵转,电机在堵转时会出现较大的电流。如果不采取电机驱动保护措施,可能使电路控制部分损坏,这样整套设备就无法操作控制。因此需建立控制信号与反馈力的关系统模型。电机转矩公式为


式中,n为电机转速(r/min);U为电机端电压(V);
为与电机结构有关的常数;R为电机电阻(Ω)。当相位角趋于最大时,摆动转速为零,此时n=0,因此由式(1)、式(2)得出

由式(3)可知,在电机堵转状态下,在电驱电阻R及磁通量均不变的条件下,电机输出转矩与电机端电压成正比。因而电机驱动采用调节电机端电压的方式。
5 微功耗无线射频传输技术的研究
为满足树障清理机器人操作工作人员身临其境直观的信息,使操作工作人员现场做出正确的决策和措施,实现高速的无线通信质量是树障清理机器人大数据信息传输的关键技术所在。采用5G技术自建通信网络的方案,2-FSK、GFSK调制方式,提高了数据抗突发干扰和随机干扰能力,可有效满足树障机器人多通道视频及数据传输的应用需求。
6 双电源自动切换装置的研究
树障清理机器人因其便携式的需要,选用能量密度、可靠性、安全性高的锂电池作为动力电源。为保障树障机器人的额定工作时间,不出现因电池耗尽无法操控。电源系统采用了双电源系统设计。为符合本项目使用,电池性能指标及电池使用条件一般应考虑以下几个方面。
⊙ 电池的工作电压。
⊙ 电池的工作电流:即正常放电电流和峰值电流。
⊙ 电池工作时间:包括连续放电时间、使用期限或循环寿命。
⊙ 电池工作环境:包括电池工作环境及环境温度。
⊙ 电池的最大允许体积:特别是随着电子产品的小型化和轻量化,允许电池存在的空间将越来越有限。
7 结束语
采用多足仿生技术的输电线路树障清理机器人作为树障清理工具,尤其作为便捷式工具需好用、耐用,由于制造工艺、设计安装、缺陷类型、失效机制、运行操作的复杂性,尚有下列基础理论和关键技术有待进一步突破。
(1)便捷性。该项目的成果是便捷式的机器人替代人工作业,便捷性尤为重要,除选用密度更小强度更大的材料外,更需要在现有功能的基础上将设备向集成化方向优化,其一为动力电池与框架结构的集成,其二为轮毂电机与整机结构的集成。
(2)适应性。通常清理对象为生长接近高压输电线路导线的树尖,此时高压电磁场较强,如果机器人在树杆中间过长,影响安全放电间距,存在二次风险,因此需要便捷小尺寸的机器人能替代人工爬行到树顶部。从树底部到树断尖的顶部位置,树径变化好几倍,因而机器人必须对树径的变化适应性要强。
本文通过对树障爬行机器人的设计研究、电机匀速驱动的设计研究、微功耗无线射频传输技术的研究、双电源自动切换装置的研究,提出了一种基于光流匀速远程操控的树障清理机器人设计方法。系统以锂电池为动力电源系统,通过光流、力矩采集、驱动、通信单元驱动轮毂电机,最终设计的产品具备体积小、质量轻、便于安装、操作简单,具备5 km及以上自主行走、人工远程遥控操控功能的树障清理机器人可替代人工作业,有效解决输电线路走廊树障的安全隐患问题,可大幅替代人工进行攀爬作业,有效降低人身高空坠落或触电、线路跳闸等风险,从而产生巨大的社会效益和经济效益。■
猜你喜欢
今日农业(2022年14期)2022-09-15
军事文摘(2022年14期)2022-08-26
汽车实用技术(2022年7期)2022-04-20
科学大众(2021年21期)2022-01-18
小学科学(学生版)(2021年12期)2021-12-31
小学生学习指导(低年级)(2021年9期)2021-10-14
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
制造技术与机床(2019年7期)2019-07-22
小学阅读指南·低年级版(2015年1期)2016-02-18