基于辅助座板的老年人辅助站立系统研究
2023-01-12 04:25雷云菁宋义林
黑龙江大学工程学报 2022年4期
张 彤,雷云菁,宋义林
(黑龙江大学 机电工程学院,哈尔滨 150080)
0 引 言
站立运动是普通人日常生活中最基本的运动之一[1-2]。站立过程中膝关节力量的大小是站立运动实现的重要因素。然而,老年人由于身体平衡能力减退、肌肉力量下降、关节老化与磨损加重以及其它各种关节疾病的出现,会引起运动系统的衰退及下肢力量不足,导致站立困难[3-4]。研究表明,适当的运动及步行锻炼对延缓老年人衰老有重要作用[5]。Miyake N等[6]研究表明,影响老年人站立困难的原因是身体平衡感下降导致站立过程中身体前倾幅度减小,膝关节力矩变大,下肢肌肉力量不足等。为改善失能/半失能以及因各种原因导致站立困难老年人的健康状况和生活质量,开发辅助站立系统、帮助老年人实现站立十分必要。
辅助站立系统主要包括2个方面:辅助站立装置和辅助运动轨迹。国内外开发的辅助站立装置按照辅助部位不同可分为3类:以上肢作为辅助支持部位;以上身躯干为辅助支持部位;以髋关节或臀部为辅助支持部位。主要的辅助站立装置有:辅助站立移步机、辅助下肢康复装置、辅助站立床和辅助站立座椅等。辅助装置的运动轨迹主要有4种:参照年轻人站立运动时肩关节或髋关节的运动轨迹;参照辅助对象在看护人员辅助下各关节角度变化的运动轨迹;根据站立运动过程关节角度约束条件规划的运动轨迹;实时控制调节的运动轨迹[7]。每一个辅助部位都有其自身的特点和适用对象。例如,以手臂作为辅助部位的装置主要适用于上肢力量强的人群;以上身躯干为辅助部位的移位装置适用于上肢力量弱但上身可以借助于防护马甲的人群;以髋关节、臀部作为辅助部位的装置适用于上肢、上身躯干的力量都不强的人群。
本研究基于人机工程学原理并考虑以老年人为对象的应用特点,提出了基于辅助座板的辅助站立方案,确定了辅助站立模式和辅助座板运动轨迹,开发了辅助站立装置。该辅助站立系统在有效辅助老年人站立的同时,能使老年人自身的力量也参与其中,避免其长时间使用对系统产生依赖、加速下肢关节力量退化。实验结果表明,辅助站立系统基本达到了预期的辅助效果。
1 体站立过程分析
站立运动过程主要是指依靠人体自身的力量实现重心从静止状态到动态平衡的连续过程。一般认为站立过程可分为3个阶段[8-9]:①站立准备阶段:身体躯干前倾,人体重心前移,下肢肌肉收缩为提供站立过程所需的动力做准备;②站立过渡阶段:大腿离开座椅座板开始绕膝关节转动,身体躯干绕髋关节转动;③站立稳定阶段:膝关节和髋关节运动到最大角度,重心达到最高点,身体完全站立,下肢肌肉保持站立平衡。
人体站立运动可认为是关于正中矢状面对称的一种平面运动。即通过人体的正中线将人体分为左右对称两部分的平面。因此,可将人体站立力学模型简化为正中矢状面内具有3个自由度的二维运动模型[10]。为了方便分析与计算,可将人体结构简化为3个部分:上身躯干部分、大腿部分和小腿部分。其中,上身躯干部分在运动过程中可视为一个整体,包括身体躯干、上臂和头颈。小腿部分包括小腿和足部。另外,人体关节处有自身润滑作用,可将其视为无摩擦的旋转运动副。因此,可将起立过程中的人体简化为由上身躯干、大腿及小腿构成的平面内的三连杆机构运动模型。以老年人站立运动为研究对象时,考虑到动作速度缓慢,站立过程产生的惯性力很小,可认为无辅助站立运动时仅受自身重力、地面上的支反力以及关节处内力的作用。
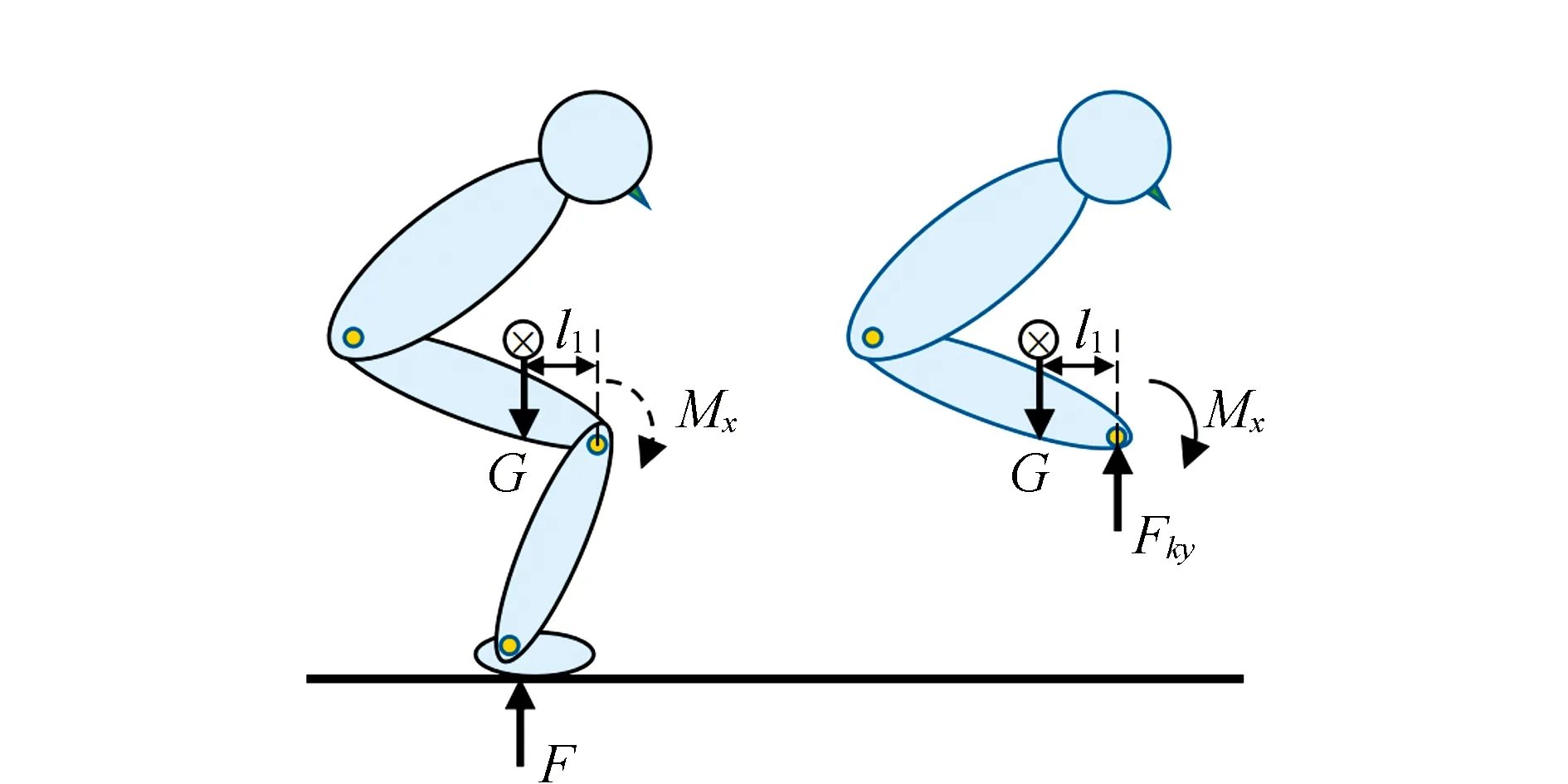
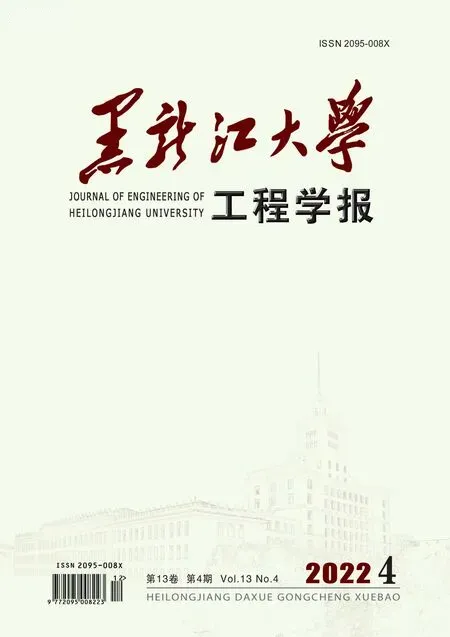
图1 无辅助站立时人体受力模型Fig.1 Human body mechanics model when standing without assistance
无辅助时人体站立过程的受力模型见图1。事实上,无辅助站立运动人体只受到2个外力的作用,人体的自重G(mg)和地面给人的支反力F。根据力的平衡原理,人体站立过程中的任一平衡位置上这两个力总是大小相等、方向相反,作用在同一条铅垂线上。并且,这条铅垂线与地面的交点必须落在脚掌的有效支撑范围内。否则,人体就不会有稳定的位置,或者倒向后面,或者扑倒在前方。这也是人在站立时小腿、大腿、躯干不断调节角度并自动调节重心位置的原因。另一方面,人体在站立过程中,人体自重始终是以阻力矩的形式存在,要想实现站立人体就必须由肌肉产生主动力矩来克服这个阻力矩,从而使大腿及上身躯干部分绕膝关节转动。其运动条件为
Mx≥Gl1
(1)
因此,人体各部分在站立过程中的主动调节有两个作用:①使重心的位置落在脚掌的有效支持范围内,获得稳定支撑;②使重心的位置离膝盖关节更近,减小所需人体肌肉产生的力矩。
2 辅助站立模式的确定与装置开发
2.1 辅助站立模式的确定
老年人站立困难的原因:①身体的调节能力差,重心不易调节到合适的位置;②肌肉产生的力矩不足,甚至难以克服由自重引起的阻力矩的作用。因此,辅助站立系统的功能是将人体重心尽可能调节到具有稳定支撑的位置并靠近膝关节,减少肌肉主动力矩的输出。
目前市面上售卖的家庭辅助站立座椅是通过座椅座板的单一旋转运动来辅助人体完成站立,见图2(a),座椅座板在旋转时需要很大的推力,而在快要完成站立时推力会产生较大的水平方向分力推人向前运动。然而,为了减少座板水平分力对人的前推作用,将辅助座板设计成以水平姿态垂直向上抬升、转移部分重量到脚掌处来辅助人体完成站立(图2(b)),若在辅助座板上坐的靠后,此时,易将人体整体抬起,使两脚不得已离开地面;若坐的靠前,则易使人滑离座椅座板。另外,座板抬升的过高,还会使人体大腿部感到不适。
合理的辅助运动模式应包含人坐在辅助座板上的合适位置,以及辅助座板合理的运动轨迹。实验发现,当人体臀部坐在离辅助座板边缘约100 mm处,座椅座板呈水平姿态垂直抬升时一般不会将人整体抬起,也不会轻易使人滑离座板。实验还发现,座椅座板水平抬升的高度应尽量高一些,这对完成辅助站立运动有利。然而,座板的水平抬升高度受到大腿舒适度的限制。
本研究提出了一种基于辅助座板的辅助站立模式,见图2(c)。其主要内容包含2个方面:坐位和座板运动。坐位:要求辅助站立时人体的臀部坐在离辅助座板边缘往里约100 mm处。辅助站立过程中的座板运动:分为两个阶段。第一阶段,辅助座板以水平姿态抬升同时绕膝关节转动,对应于膝关节的转动角度(从水平方向算起)为α1;第二阶段,辅助座板边绕膝关节转动边绕自身铰点转动,至辅助站立结束,对应于膝关节的转动角度为α2,座板自身转动角度为△α=α2-α1。α1由辅助座板抬高过程中大腿的舒适度决定;α2由辅助站立终了时剩余阻力矩决定。老年人站立运动过程中若膝关节阻力矩超过0.5 N·m·kg-1[11],站立困难;在0.5 N·m·kg-1以下,一般可自力站立。为了避免老年人在使用站立辅助系统后产生过度依赖,在确定辅助站立模式时,考虑将老年人自身的力量也参与其中。因此,以膝关节阻力矩Mx≤0.5 N·m·kg-1作为结束辅助站立的依据,即,α2为膝关节阻力矩为0.5 N·m·kg-1时所对应的大腿转动角度。
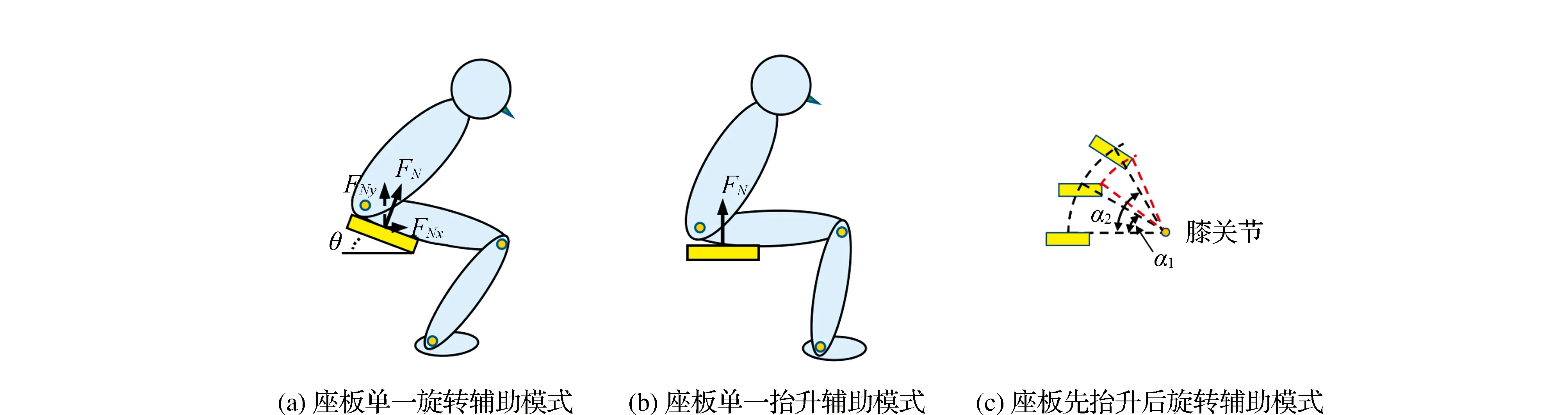
图2基于座板的辅助站立模式Fig.2 Assistive standing mode based on seat plate
为了获得α1、α2,搭建了可以同时测定大腿绕膝关节的角度和人体重心位置的实验平台,选择年龄在24~28岁、身高在161~188 cm、体重在46~81 kg的12名实验者参与实验。大腿绕膝关节转动的角度通过记录站立过程中髋关节和膝关节的位置信息来确定。人体重心位置是通过4个力传感器形成的称重平台来获得。在确定α1值时,将辅助座板按前面确定的运动规律,以5 cm的梯度逐次升高,每升高1个高度让实验者按照自然的站立方式完成6次站立运动实验。其中,前3次为适应练习,后3次为正式实验,记录坐高与α1的实验数据,直到实验者感到不舒适的高度为止。与此同时,每一次站立过程中身体重心对膝关节的阻力矩及其对应的大腿绕膝关节转动的角度,得到阻力矩0.5 N·m·kg-1对应的角度α2。实验得到α1的值为38°±4°,α2的值为57°±13°,相关性分析显示,α1与实验者身高呈弱相关,与实验者身高呈弱相关、与实验者体重呈低相关。
2.2 站立辅助装置开发
根据辅助座板运动轨迹(图2(c)),进行了站立辅助装置的开发设计。辅助装置采用了平行四边形机构运动、双电动推杆驱动的结构方案。当人体从坐姿开始辅助站立到α1期间,电动推杆1匀速驱动平行四边形机构的连架杆使连杆上的座板进行平动,电动推杆2不动作;当辅助站立从α1到α2期间,电动推杆1继续匀速驱动平行四边机构,与此同时电动推杆2匀速驱动座板的一端使其绕另一端的铰点转动,直至达到大腿的角度为α2辅助结束。两个电动推杆全部采用步进电机驱动,单板机控制,使其实现匀速推进。
开发的站立辅助装置见图3。由图3(a)可见,该装置主要由电动推杆1、电动推杆2、座板框架3、座椅座板4、连架杆5和底座6组成。为使辅助站立装置驱动平稳,电动推杆1和电动推杆2均采用了双推杆结构。辅助座板4安装在平行四边形机构的连杆上,在平行四边形的最低位置时,座椅座板的高度正好为使大腿角度基本处于0°的状态。此时,辅助座板的支架由底座6支撑。
图3 辅助站立装置Fig.3 Assistive standing device
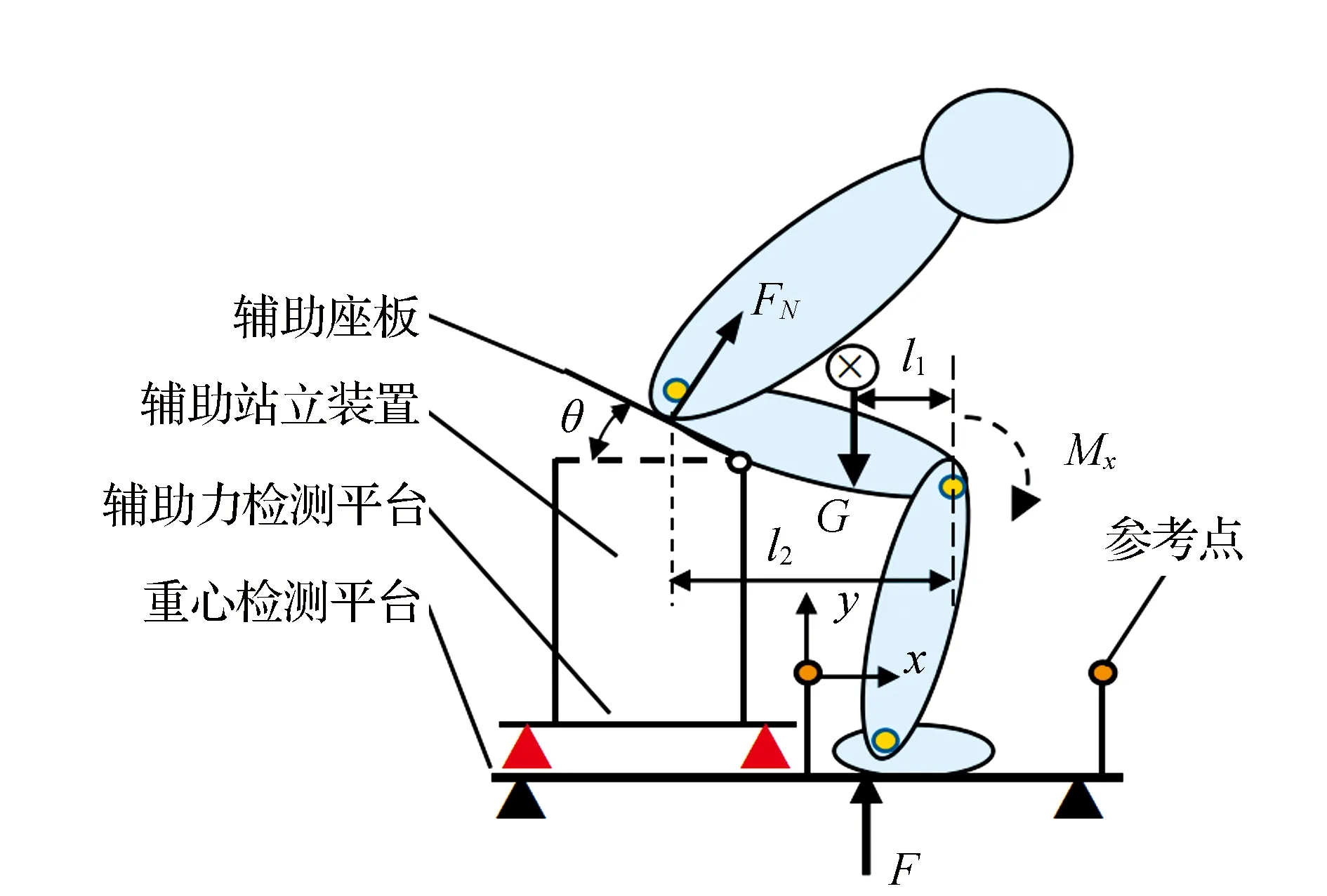
图4 辅助站立系统有效性评价实验平台Fig.4 Experimental platform for effectiveness evaluation of assistive standing system
3 辅助站立系统的有效性评价
考虑到身高不同对座椅座板的高度要求不同,本评价选择身高171~180 cm的6位身高不等的实验者进行了有辅助站立运动实验。评价分为2个方面:①以膝关节阻力矩峰值为指标,比较人体站立运动在有、无辅助情况下的膝关节力矩峰值的变化,并且观察在有辅助站立运动过程中辅助周期的影响以及辅助结束时的膝关节阻力矩峰值是否降至0.5 N·m·kg-1以下;②以下肢肌肉的表面肌电信号峰值为指标,比较人体站立运动在有、无辅助情况下下肢肌肉提供力量的变化。
辅助站立系统有效性评价实验平台见图4。实验平台由重心检测平台1和辅助力检测平台2组成。重心检测平台主要用来检测人体的质量和站立过程中重心位置的变化,由4个称重传感器支撑;辅助力检测平台是由本研究开发的辅助站立装置3与底板组成,辅助站立装置安装在底板上,底板由4个力传感器支撑并置于重心检测平台之上,用于检测站立过程中辅助力的大小和位置。膝关节、髋关节和躯干的位置则是通过粘贴上的标记点由图像处理来获得。在考核下肢肌肉在站立运动过程中的贡献情况时,采用了较易检测的表面肌电信号作为参考指标,并参考相关研究资料选择股直肌与胫骨前肌为信号采集源,用LabVIEW软件进行采集和保存。
实验步骤包括:对实验者下肢肌肉电极粘贴处进行清洗,粘贴电极并调试好;进行无辅助站立运动实验;进行有辅助站立运动实验;数据采集并保存。每一个站立实验项目均进行4次站立运动,前3次为实验练习,最后1次为正式实验,采集和记录数据。每一次站立运动完成后要休息5 min,使肌肉得到充分放松。有辅助站立运动实验时,从辅助开始到辅助结束设定了不同的辅助周期,分别为20 s、25 s、30 s和35 s。实验中实验者的上身和上肢没有附加约束,站立时可自由调节。
其中1位实验者在无辅助站立运动时关节角度、座椅座板所承受的人体质量和膝关节阻力矩等的变化情况见图5(a)。由图5(a)可见,在无辅助站立过程的第一阶段,随着人体臀部的逐渐抬起,身体躯干前倾幅度增加,座椅座板所承受的人体质量越来越小,膝关节的阻力矩逐渐增大。当臀部完全离开座椅座板时,身体躯干与水平方向的角度为最小值17.5°,大腿与水平方向的角度为20°,座椅座板所承受的身体质量为0,膝关节阻力矩达到最大值,约为0.8 N·m·kg-1;在站立运动过程第二阶段,随着大腿角度继续增加,在人体各部位的调节作用下,身体躯干角度开始逐渐增大,膝关节阻力矩逐渐减小;在站立运动过程第三阶段,随着站立运动的进行,大腿角度与身体躯干角度逐渐趋于稳定,膝关节阻力矩也随之稳定,站立运动结束。
对应的实验者在站立运动过程中股直肌与胫骨前肌的表面肌电信号变化情况见图5(b)。由图5(b)可见,在无辅助站立过程中,股直肌与胫骨前肌的表面肌电信号均呈现出先平稳再增加后减小的变化趋势,而且它们在膝关节阻力矩达到最大值的前后也分别达到最大值。其中,胫骨前肌的肌电信号变化剧烈,说明胫骨前肌对人体站立过程的影响更大,信号峰值达到了0.31 V。同时,股直肌与胫骨前肌的表面肌电信号峰值存在时间差,表明两肌肉在站立运动过程中发挥主要作用的时间段有所不同。
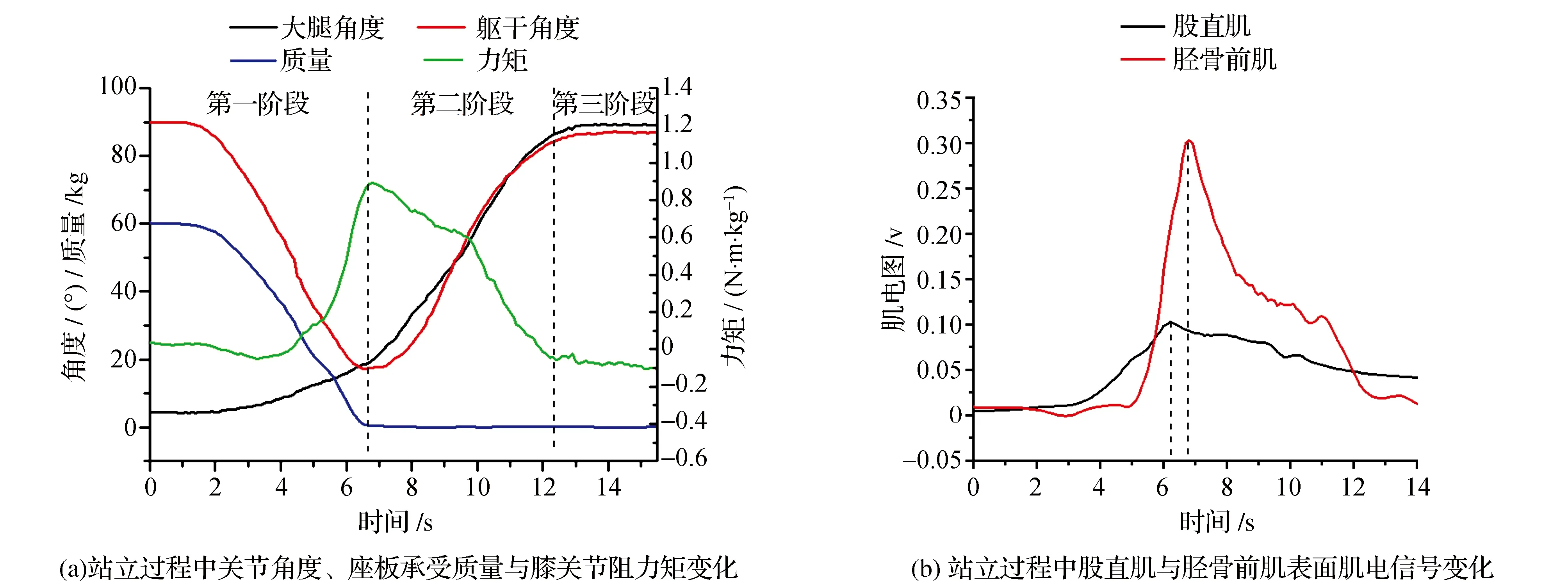
图5 实验者在无辅助时的站立运动Fig.5 Standing movement of an experimenter without assistance
同一名实验者在辅助周期为30 s时的有辅助站立运动情况见图6。图6(a)中,0~T1为辅助站立准备阶段,T1~T2为辅助座板随平行四边形机构的平动阶段,T2~T3为辅助座板边平动边自身转动至辅助结束阶段, T3~T4为实验者自主站立阶段。在辅助准备阶段,与无辅助站立运动基本相同,实验者的身体躯干稍向前倾,实验者在辅助开始时刻身体躯干的角度为63.6°。在辅助座板平动阶段,大腿角度保持匀速增加,由于辅助系统的作用,实验者的躯干部分无需进一步前倾,甚至有微微抬起的趋势,辅助座板所承受的身体质量缓慢减少,膝关节基本不承受阻力矩作用。在辅助座板自身旋转阶段,实验者身体躯干快速前倾,人体重心前移,辅助座板所承受的人体质量越来越小,提供的辅助支持力也越来越小,膝关节阻力矩开始增加;至辅助完全结束时刻,臀部完全离开座板,大腿与水平方向的角度为63.3°,身体躯干与水平方向的角度为36.4°,辅助支持力减为0,膝关节阻力矩达到峰值为0.43 N·m·kg-1。在自主站立阶段,人体依靠自身力量来完成剩余的站立运动,此阶段的运动过程与无辅助站立运动过程基本相似,大腿角度继续增加,躯干角度徐徐增大,重心前移,膝关节阻力矩逐渐减小,在大腿与躯干等部位的配合作用下逐渐完成站立并达到稳定。在整个站立运动过程中膝关节阻力矩始终小于0.5 N·m·kg-1。同时,比较图6(b)与图5(b)可见,股直肌与胫骨前肌表面肌电信号的幅值与无辅助时相比有明显的减少,胫骨前肌的肌电信号峰值仅有0.06 V,减小的幅度为80.6%,表明实验者在有辅助站立运动过程中需要的肌肉力量确实减小很多,但其与阻力矩的减小并非呈线性关系。此外,由于辅助结束时膝关节尚有剩余阻力矩的作用,最终站立前下肢肌肉还需要产生一定的主动力。
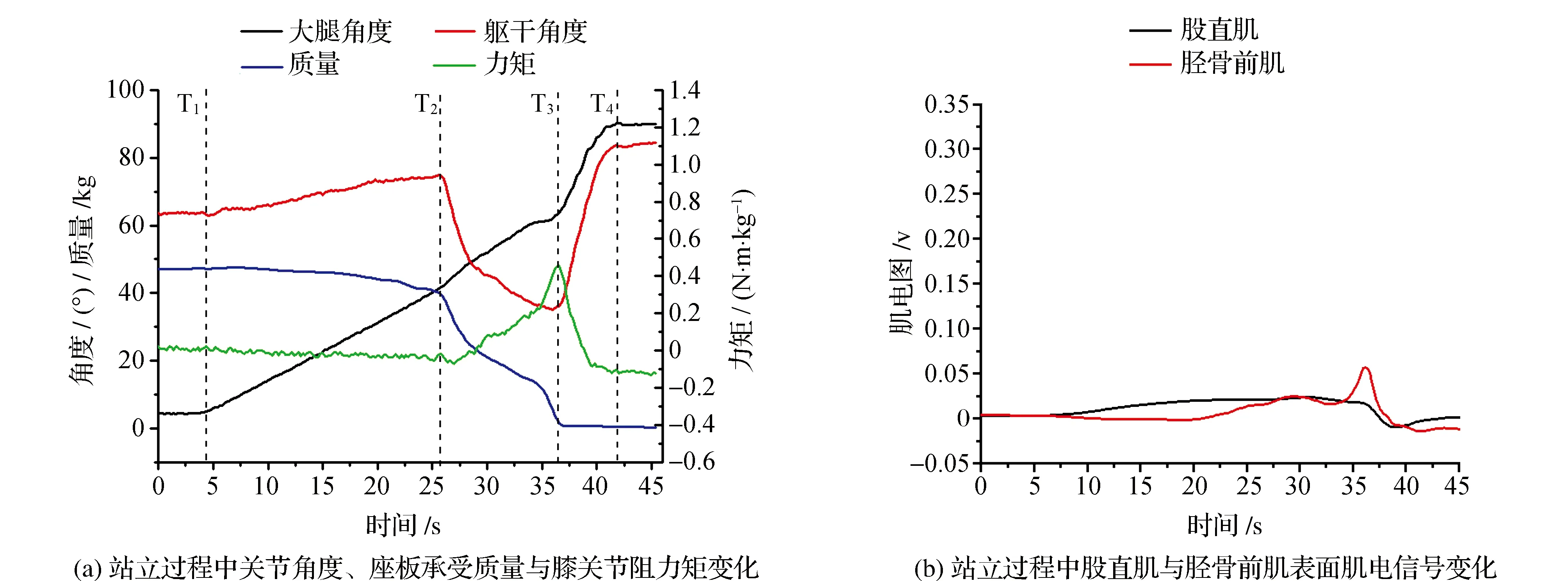
图6 实验者在有辅助时周期为30 s的站立运动Fig.6 Experimenter’s standing movement with a period of 30 s when assisted
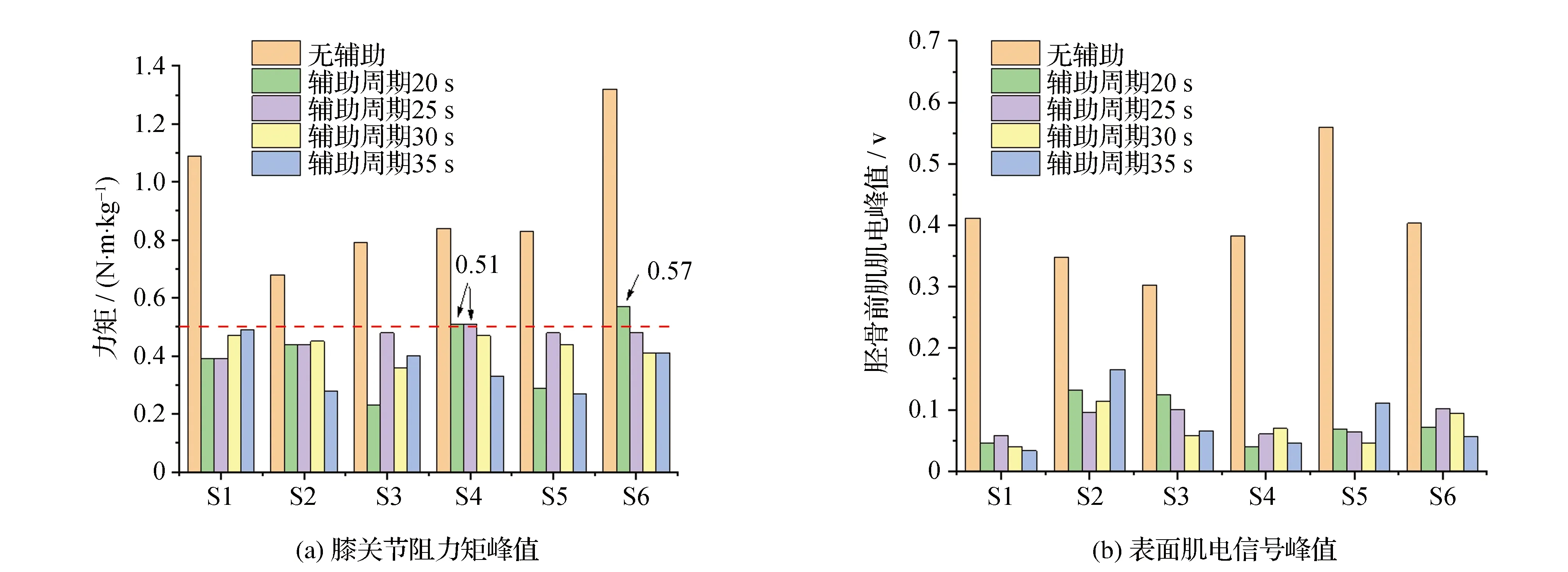
图7 实验者在有无辅助时阻力矩峰值与表面肌电信号峰值的比较Fig.7 Comparison of peak resistance moment and peak surface EMG signal with or without assistance
6名实验者在无辅助时及有辅助的4种不同辅助周期下的膝关节阻力矩峰值和胫骨前肌表面肌电信号峰值的情况见图7。由图7可见:①6名实验者在有辅助时4种不同辅助周期下的膝关节阻力矩峰值和与其自身在无辅助时相比均有明显减少,阻力矩峰值平均减小幅度为54.2%,表面肌电信号峰值平均减小幅度为74.3%;②虽然在辅助周期20 s及25 s时,个别实验者在辅助结束时的膝关节剩余阻力矩没有降到0.5 N·m·kg-1以下,但在辅助周期30 s与35 s时,6名实验者的膝关节阻力矩峰值均小于0.5 N·m·kg-1,达到了本研究所设定的目标。说明,辅助结束的角度与个人的站立运动模式有差异性,但给以足够的站立准备和自我协调时间,均会有效降低膝关节剩余阻力矩,对站立缓慢的老年人更加有益;③ 6名实验者在辅助周期20 s、25 s、30 s和35 s情况下,膝关节阻力矩峰值的平均减小幅度分别为55.9%、48.3%、51.8%和60.6%,说明该辅助系统在不同的辅助周期下均有明显的辅助效果。
4 结 论
本研究以老年人辅助站立系统为研究对象,在进行人体站立运动分析的基础上,确定了辅助站立运动模式和辅助座板运动轨迹,开发了基于辅助座板的辅助站立装置,进行了人体在无辅助时及有辅助4种不同辅助周期下的站立运动实验,并以膝关节阻力矩峰值及下肢股直肌与胫骨前肌的表面肌电信号峰值为指标对辅助站立系统进行了有效性评价,得出了如下结论:
1)确定的辅助站立运动模式及辅助座板运动轨迹,符合人体站立运动时下肢的运动规律,用平行四边形机构实现辅助座板的平动及电动推杆实现辅助座板绕自身转动经实验检验是有效的。
2)通过预备实验确定的辅助座板以水平姿态抬升同时绕膝关节转动所对应的大腿转动角度为α1,以及辅助站立结束时对应的大腿转动角度为α2,作为辅助站立装置开发的基本参数,对保证辅助站立效果是有用的。尤其是以膝关节阻力矩在0.5 N·m·kg-1以下作为辅助站立动作结束的依据,达到了辅助站立的目的,老年人对系统不产生过度依赖。
3)搭建了辅助站立运动实验平台,以膝关节阻力矩峰值和股直肌与胫骨前肌的表面肌电信号峰值为指标进行了辅助站立系统的有效性评价。实验结果表明,6名实验者在辅助站立运动实验中,4种不同辅助周期下的膝关节力矩峰值平均减小了54.2%,且30 s和35 s周期下所有实验者辅助结束时膝关节的剩余阻力矩均减小至0.5 N·m·kg-1以下,实现了辅助站立系统的设计目标,辅助站立系统的辅助效果是明显的。同时,6名实验者在有辅助时的4种不同辅助周期下,站立运动过程中的股直肌与胫骨前肌的表面肌电信号峰值相对无辅助时平均减小了79.6%和74.3%,表明辅助站立系统确实减少了下肢肌肉的负担,可有效缓解老年人站立困难的情况。
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
中国特种设备安全(2022年2期)2022-07-08
体育科技文献通报(2022年5期)2022-06-05
诗选刊(2019年9期)2019-11-20
婚姻与家庭·性情读本(2019年2期)2019-03-15
中西医结合心血管病杂志(电子版)(2019年25期)2019-01-03
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
爱你(2016年18期)2016-04-10
探测与控制学报(2015年4期)2015-12-15