航道测绘中多波束测深仪的应用分析
2023-01-14 12:34严秀秀YANXiuxiu
价值工程 2023年1期
严秀秀YAN Xiu-xiu
(安徽省港航管理局淮河航道局,蚌埠 233000)
0 引言
多波束测深系统中集成计算机、数字化传感器、水声、定位导航等多种技术。很多传统的航道测量工作中,使用单波束测量仪进行测量需要专门加密测线,很难满足测量精度、覆盖率等要求,并且测量效率也相对比较低。根据需求和当前技术发展状况,目前发展出性能更强、精确性更高的多波束测量方法,使用多波束航道测绘技术能够提供多个信道定向发射和接收声波,通过对返回的声波进行分析,能够获得更为准确、覆盖性更大的航道相关数据,所获得的测试结果更具有应用性。为此,需要加强多波束测深仪在航道应用中的研究,使用更合理的方法完善航道测绘工作。
1 多波束系统的特点分析
1.1 多波束系统基本原理
声纳探测中,多波束集成和相控偏转是比较常用的技术,能够实现基阵发射角度的控制。比如等间隔线阵是指利用N个方向性的阵元构成,在工作频率为F的情况下,指向性DL(θ)为:
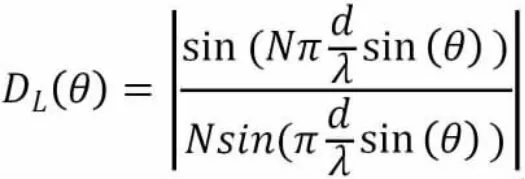
在上式中,波长为λ=c/F,其中c是声波在水中的传播速度。通过分析,在多波束回升探测仪工作中,会采用在垂直方向发射窄角的工作方式,接收换能器能够在垂直于航向的方向接收多个光束。在进行深度计算时,会叠加多个发射光束和接收光束,完成对测点深度计算,确定水深状况。
1.2 使用带状方式测量
多波束系统融合了很多先进技术,使得系统具有十分全面的功能,尤其具备极强的数据处理能力。在测量过程中,采用带状方式进行测量,因此测量范围极为广泛,能够对水下物体都进行十分全面的覆盖,获得大量的水底信息。和单波束所采用的点式测量相比,该方法测量能够提供更为广泛的覆盖范围和测量范围,并且可以精确地显示出水下各种细微的地形变化。带状测量提供的数据十分全面,而且数据密度较大,可以全面获得水下的地形相关数据,所以测量生成等值线时,由于实现了对测区的全覆盖,以及可以利用专门的软件系统进行数据解析,因此测量结果具有非常高的可靠性,解决过去数据不全的情况,满足航道测量的需求。
1.3 发射换能器比较先进
多波束测深仪在进行水底探测的过程中,系统的投射覆盖面宽度可以达到165°,根据需要接收器也进行投射波的动态聚焦,以及实时将探测过程中获得的数据传送给监视系统,实现探测和数据处理的同步。
1.4 保障航道测量的精确性
在实际测量工作中,船只会处于被动变化的状态,测量结果的精确性、测量的可靠性都会受到影响。使用多波束系测深仪可以解决测量中的问题,通过对各种动态数据进行收集,以及数据的综合分析,可以完成对数据的优化和测试结果的补偿[1]。例如目前使用了运动传感器、光纤罗经等设备,通过相关软件进行处理,测量获得的水深数据精度得到了明显的提升,而且可以同时获得测量数据。通过相关数据的处理和校正,能够获得比较精确的深度信息和水底状况。
1.5 能提供直观的数据图
使用多波束测深装置的数据密度很大,通过进行可视化处理能够提供直观的数据图。目前对数据的处理软件功能完善性很强,能够根据数据以及实际要求,进行不同比例尺的出具测量工作,并且在此基础上可以生成数据图。根据航测工作需求,可以进行数据的多样化处理,比如可以生成测量深度图像、提供水深等值线数据图,还能够生成水下的地形模型,以及提供地形星图和彩色水深图等[2]。根据软件对数据的处理情况,也能形成数据的质量报告,方便开展质量分析工作。
2 多波束测深仪安装和检测
2.1 电罗经传感器设置
电罗经的设置对精度要求较高,需要保证传感器在船舶中心周围设置,以及保证电罗经指示角度和船首的方向相同,以及保证其处于船体坐标轴的水平面中。安装位置需必须远离导磁材料和容易被磁化的材料,避免由于磁性导致干扰。电罗经和大体积铁性物质、强电流导线、电池组等等需要维持1.3米到1.5米的距离,同时有些电子产品所产生的电磁干扰也会影响电罗经的稳定运转,会导致测量的方向失真和影响结果,因此设置电罗经时必须远离这类电子产品[3]。
2.2 设置运动传感器
运动传感器设置时必须做好对传感器的固定,并且保证传感器和水平面保持平行[4]。由于运动传感器和船的重心越远船体的纵横倾向变化旧越大,所导致的测绘偏差就越大,为了确保传感器的精度,应在船体的重心位置进行安装。同时设置运动传感器时需要注意传感器的方向性,保证在其在罩壳上的显示方向和船首的方向一致,避免出现反向改正导致偏差[5]。
2.3 设置多波束换能设备
多波束换能设备应以船型和船舶的结构为基础,其次要结合多波束测深仪所进行航测作业的水域特点进行设置,比如在内河进行测绘时,由于水相对平稳,受到风浪的影响程度比较小,因此一般将换能设备在船首进行设置,但是对于潮汐河口、近海水域进行测绘时,由于容易受到风浪影响,因此需要在船舷进行固定[6]。为了避免换能器沉降、设备抖动导致测量精度下降,需要做好对换能器的固定工作。同时为了避免换能器在码头出现受损、满足对测量的安全要求,设置换能器时要保证换能器的可拆卸、可转移,实现对测绘工作的灵活调整。
2.4 DGPS接收天线
DGPS接收器天线需要在船舶的高处设置,而且场内的障碍物角度需要控制在10°以内,接收器的天线应尽量远离船体的主桅杆,以及远离大功率无线电信号发射源,避免对接收天线造成干扰。接收天线的设置位置需要保持稳定,避免由于航测过程中船体的姿态、位置改变导致接收天线不稳定影响测试精确性。天线的位置也要远离船舶的重大金属体,而且要和夹板保持超过1.5米的距离,避免信号的多途径效应影响定位。
测试工作可以分为通电水测试和航行检测。通电测试是在静态状况下开展检测工作,可以对平台的各个部分导线衔接状况进行稳定性检查,确定航测平台的性能,以及检查设备的接地是否准确和可靠;其次可以检测直流配电系统是否准确,检查电极的极性是否正确,确认正常后就可以分析系统每个部分通电的运转状况,检查信号的固定性和信息通信状况[7]。航道检测中,应该选择合适水域进行横倾、纵倾、罗经误差等检测工作,对出现的错误进行修正,分析各种设备是否能够正常运行。
3 EM2040多波束测深仪应用
3.1 EM2040多波束测深仪概述
使用EM2040进行测深工作时,能够发射覆盖角度达到200°的扇面,配合接收换能器,能获得5.4倍水深扫宽,根据实际需要,还可以再增加一台换能器,水深扫宽就能达到10倍水平。使用EM2040进行测深工作会获得大量的扫描数据,通过以太网和计算机连接,能完成对大批量数据的快速处理,常用的数据处理软件为SIS,根据需要必须使用专业的工作站计算机,保证数据的计算速度。图1为EM2040系统的构成。

图1 EM2040构成
3.2 工作模式
EM2040可以发射200-400kHz的微波,一般情况下以300kHz为主要工作频率,能最大程度发挥其具备测深功能,并且测深分辨率比较高,而且300kHz模式下带宽超过75kHz,并发射具有一定频率差异的三个扇区,满足不同条件下测试精度需求。脉冲的最小长度为35μs,斜距分辨率为3厘米。使用200kHz模式能满足波束测深仪的工作特点,具有比较强的测深能力,可以获得高分辨率的测量数据。
3.3 软件系统
系统所使用的软件为Qinsy软件,能够帮助测深工作进行导航,综合进行数据的收集和处理,还能可视化显示各类数据。软件采用模块化设计,模块功能包括检测、数据处理、输出结果等,同时也能实时显示测深工作的过程,可以提示工作人员的偏航情况,也能接受卫星信号,还支持多个显示器。后处理多波束数据的软件为Caris软件,可以汇总测量得到的数据,计算航道波束点深度和平面坐标,根据传感器相关数据绘制多波束声纳图像,之后可以绘制航道的地形图和地貌图。
4 EM2040多波束测深仪航道测绘实施
为了保障水下地形的测绘工作的高效性和准确性,需要严格遵守流程,进行测线布设、仪器安装等工作。
4.1 测线布设
侧线布置是测深工作的基础,需要先布置主测线,布置时应确保主侧线和等深线之间保持保持平行,而且满足测取长轴走向的控制要求,相邻测带之间的重叠率应该超过15%。实际测量中,如果水底起伏比较大,可能出现测线难以全覆盖的情况,已满会采用加密测线的方式,提升测绘工作精度[8]。布置检查线时,需要确保间隔均匀,方向和主测线垂直,方便检查先对主测线的检查,而且注册线的长度要超过5%。
4.2 仪器安装
仪器安装工作的质量会直接决定多波束测量工作的结果和数据质量,因此必须严格遵守顺序要求进行安装工作。同时,需要在较好的系统环境下进行换能器的安装,比如应避免换能器所处位置有噪声干扰,防止出现气泡对换能器的正常运行产生影响,而且保证测深工作中,换能器长期保持在水面以下。同时需要保证控制系统、定位天线、运动传感器之间的空间相对误差在5厘米之内,接收器应在换能器周围设置。
测绘系统对工作所处的环境有着比较严格的要求,必须保证工作时100厘米内没有障碍影响,并控制工作室温度不超过25℃,湿度控制在40%-70%。传感器应在船中心位置或者重心比较近的位置安装,保证传感器的稳定性,而且要做好相对位置测量控制,将误差控制在5厘米以内。导航系统应尽量在满足安全原则情况下在高处设置,满足信号通畅需求。
4.3 系统校验
由于实际条件的限制,导致换能器的理论轴向并不能完全与视轴平行,会有比较大的斜度存在,为此可以使用不同方式测量这些角度。因此在进行作业前,还需要进行多波束系统的参数校准工作,有效避免系统出现横摇、艏向、纵摇误差。横摇检校中,应将一条测线在比较平坦的位置设置,使用同样船速进行往返测量,经过两次测量后,在Caris中输入位置相同的垂直航迹地形剖面,分析横摇的偏差,之后利用移动剖面线的位置获得不同的横摇偏差值,以横摇偏差值均值作为检校结果。艏向检校中,需要将测线在测取陡坡位置设置,然后用相同的航速沿着反方向对海底地形变化的位置进行穿越测量,使用横摇检校相同的方式进行检校。纵摇检校中,已明显的突起作为参考点,使用相同速度对两侧进行扫描,选择两条测线作为参考点的越垂线,从而完成对艏向偏移量的调整工作。
4.4 Qinsy软件数据采集和汇总
进行多波束的测试工作中,测试系统将会提供很多实时数据,以及面对多种不同的监控状况,比如水深剖面、波束数量、各种姿态数据,所有这些数据最后都要通过Qinsy软件进行汇总。在传感器、输出报文格式不同时,Qinsy软件可以进行对应类型报文格式的输出,测绘人员也能根据需要选择数据类型,最后Qinsy可以整合传感器播发的报文格式,给后续的数据处理奠定基础。
4.5 Caris软件数据处理
将多波束测量数据发送给Caris软件进行处理,能够进行数据的转换,并对结果开展精细处理,针对潮汐的影响进行修正,并融合不同方面数据,之后可以进行点云编辑等工作,完成测量工作。
5 应用实例
某项目进行100公里的航道测深工作,由于该航道的浅滩比较多,水流湍急,而且有大量的弯角,必须提供全面的测深结果以保障航道的安全。根据对现场调查和航道状况特点分析,技术人员决定采取多波束测深的方法。测深工作中,对整个区域进行四点布设,针对水准点高程的测绘中,采取上中下游三等水准点高程联测的方式。通过查阅资料,发现该航道有三座水文站,所以采用在航道中间设置四座水位观测站的工作方式。对航道设置了50条水位检测剖面,结合现场情况,最终选择出44条剖面进行深度检测。检测工作使用EM2040开展工作,并在测量后和单波束测量结果进行对比。
经过测深系统安装、流动站基站设置、测深线布置、系统校准、仪器稳定性检查后,测量RTK三维水深,同时进行数据采集。在满足不同测深系统要求的情况下,用单波束测量结果分析多波束的测量精度。表1为多波束和单波束深度精度对比。
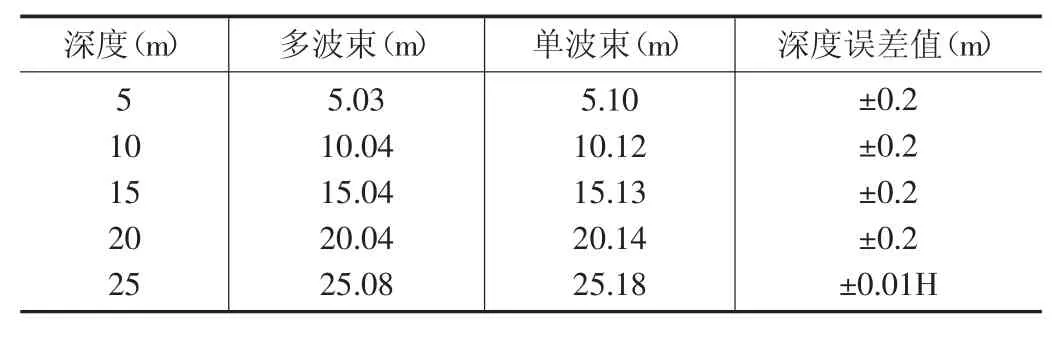
表1 多波束和单波束测深精度对比
通过对比确定多波束在不同深度情况下测深精度比单波束测深精度更高,多波束的误差都最大为0.07米,高于单波束0.25米的误差。在多次测量同一地区深度对比中,多波束的精度更高,满足《水运工程测量规范》要求。
6 结束语
多波束测深系统在航道测绘的工作中具有明显的技术优势,可以快速完成水深的测量,而且具有较高的覆盖面积,可以提供高密度的信息,可以比较好地满足现代航道测试的要求。在测试过程中,需要做好对设备的设置、数据处理等工作,加强对作业问题的处理,满足对航道测试精度的要求。在航道测深实践中,应该加强相关技术的使用,提升测深精度,提升航道的运营效率。
猜你喜欢
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
留学(2017年5期)2017-03-29
雷达与对抗(2015年3期)2015-12-09
电源技术(2015年2期)2015-08-22
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
水道港口(2014年1期)2014-04-27