电励磁双凸极电机的绕组状态及零位确定方法
2023-01-16 10:07甘忠文薛开昶袁光伟罗宗鑫
通信电源技术 2022年18期
甘忠文,薛开昶,袁光伟,罗宗鑫
(贵州航天林泉电机有限公司 国家精密微特电机工程技术研究中心,贵州 贵阳 550081)
0 引 言
严仰光等人提出了电励磁双凸极电机,其定转子均为凸极结构,定/转子凸极为6N/4N(N=1,2,3,…,N)结构的电励磁双凸极电机属于三相集中绕组方波电机[1,2]。电励磁双凸极电机通过调节励磁电流来改变反电势系数,在航空领域作为起动发电机使用时,其克服了永磁起动发电机故障时不可灭磁和三级式起动发电机不耐高温、高速恶劣环境的不足[3-5]。为了满足电励磁双凸极电机的控制需求,须在工作前确定相序、励磁电流正方向和电机零位。
永磁同步电机通过给电枢绕组按一定规律通入电流时,查看电机的运动方向来判断相序;在确定相序后,将B相和C相绕组并联,外加电流由A相绕组流入,B相和C相绕组流出,使电机锁定在零位来确定位置传感器与电机零位的偏差[6,7]。但永磁电机的励磁源为永磁体,与电励磁双凸极电机励磁源为励磁绕组不同,电励磁双凸极电机需要考虑励磁电流正方向对相序和电机零位的影响,因此永磁同步电机相序和零位校正方法不可直接用于电励磁双凸极电机。现在普遍采用将电励磁双凸极电机拖到一定转速,通过查看反电势波形的方法确定相序和零位。但该方法需要外加拖动源和示波器,相序、励磁电流正方向和电机零位的确定方法较为复杂。因此,本文通过对相序正确和相反、励磁电流方向正确和相反4种情况下的运行状态进行分析,提出了无须求外加拖动源和示波器的电机相序和励磁电流正方向的方法,并根据电机零位与电枢绕组电流的固有规律,提出了电机的零位确定方法。最后,通过实验结果验证了所提出的绕组状态及零位确定方法有效可行。
1 电励磁双凸极电极工作原理
12/8电励磁双凸极电机的结构如图1(a)所示,定义转子顺时针为正方向,按顺时针方向对定子齿进行了标号。电角度差计算公式为
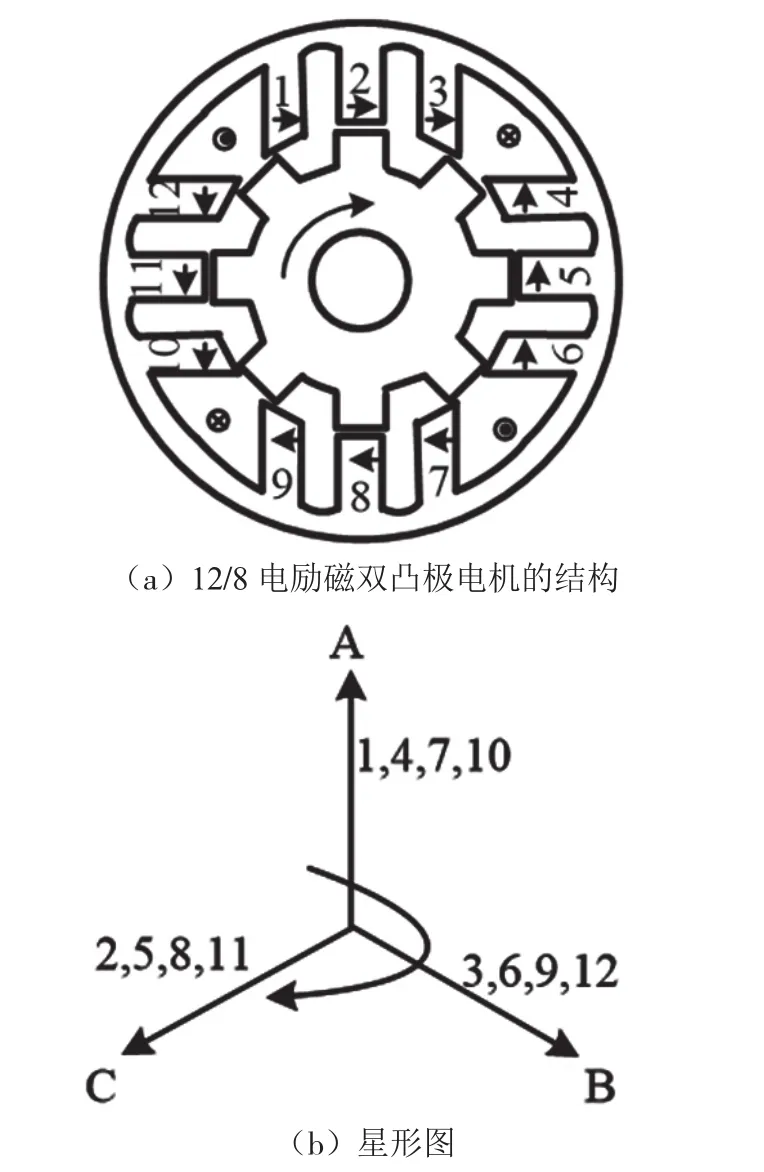
图1 电励磁双凸极电机结构与绕组星形图

式中:Z为定子齿数;p为转子极对数。对于12/8电励磁双凸极电机,Z=12,p=8。
根据式(1)可计算出每齿间的电角度差Δθ为240°。据此可得出绕组星形图如图1(b)所示,齿1、4、7和10上的绕组对应A相,齿3、6、9和12上的绕组对应B相,齿2、5、8和11上的绕组对应C相。图1(a)中齿12和1间、3和4间、6和7间、9和10间的槽用于放励磁绕组,分别采用“×”和“·”表示励磁电流正方向是进入和离开。齿上箭头表示绕组的绕制正方向。
电枢绕组和励磁绕组的展开图如图2所示,相应的定子磁通方向如图3所示,1~3齿和7~9齿上的励磁磁通由下而上,4~6齿和10~12齿上的励磁磁通由上而下。由于励磁磁通的方向差异,1~3齿和7~9齿上的绕组正面由左至右为正方向,4~6齿和10~12齿上的绕组正面由右至左为正方向。
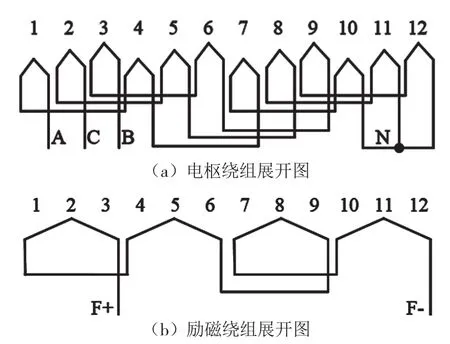
图2 电励磁双凸极电机绕组展开图
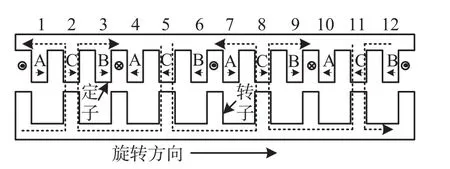
图3 电励磁双凸极电机定转子展开图
电枢电流作用在1~3齿、4~6齿、7~9齿和10~12齿上产生电磁效果是相同的,因此本文将仅取1~3齿的局部定子来对问题进行分析。
2 电机锁定位置分析方法
对于1台电励磁双凸极电机,其初始位置具有随机性,以下将在励磁电流正方向正确和相反2种情况下,分析电枢绕组通以电枢电流的情况。
2.1 励磁电流正方向正确
当励磁电流正方向正确,电枢绕组电流为A相进入、C相输出时,电机由任意位置到达锁定位置的过程如图4所示。
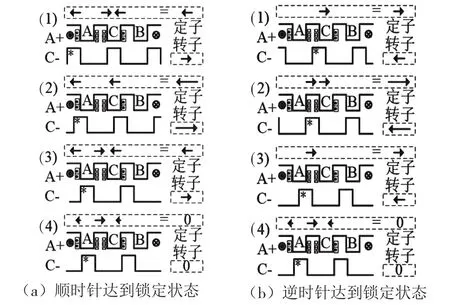
图4 励磁电流正方向正确时的位置锁定过程
结合图4(a)中第(1)状态的电机位置,对分析方法进行说明。A相电流与定义正方向相同,A相齿左侧和右侧绕组电流分别为流出和流入;C相电流与定义正方向相反,C相齿左侧和右侧绕组电流分别为流入和流出。定子齿与转子齿接触时,对应定子齿会有磁通流过;对于A相左侧绕组,根据左手定则,会产生向左的磁力,对于C相左侧和右侧绕组分别会产生向右和向左的磁力;定子磁力综合效果为向左,根据反作用力与作用力等大反向的原理,可知转磁力为向右,会使电机位置由图4(a)中第(1)状态转化至图4(a)中第(2)状态。
由图4可知,无论电机初始位置如何,在相同的特定的电枢绕组电流作用下,电机都会处于某一固定位置。在励磁电流正方向正确的情况下,电机锁定状态为转子齿与通入正向电枢电流的定子齿基本对齐,转子略微偏右一点以维持磁力平衡。
2.2 励磁电流正方向相反
采用相同方法,对励磁电流正方向相反的情况进行分析。电机由任意位置到达锁定位置的过程如图5所示。
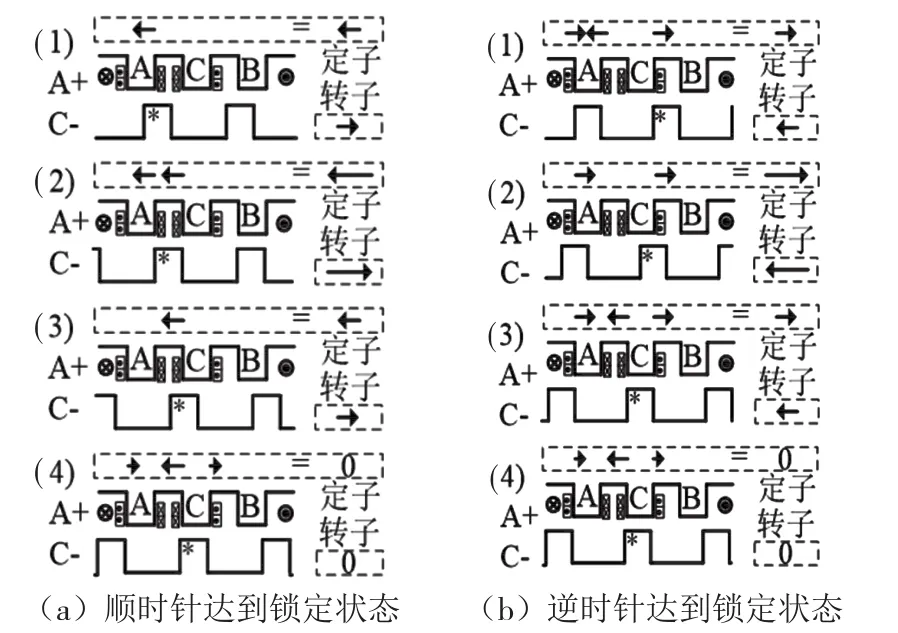
图5 励磁电流正方向相反时的位置锁定过程
由图5可知,在励磁电流正方向相反的情况下,电机锁定状态为转子齿与通入负向电枢电流的定子齿基本对齐,转子略微偏左一点。
3 相序识别原理
3.1 不同相序、励磁电流方向下的工作原理
图6对不同相序、励磁电流方向下4种情况进行了归纳。
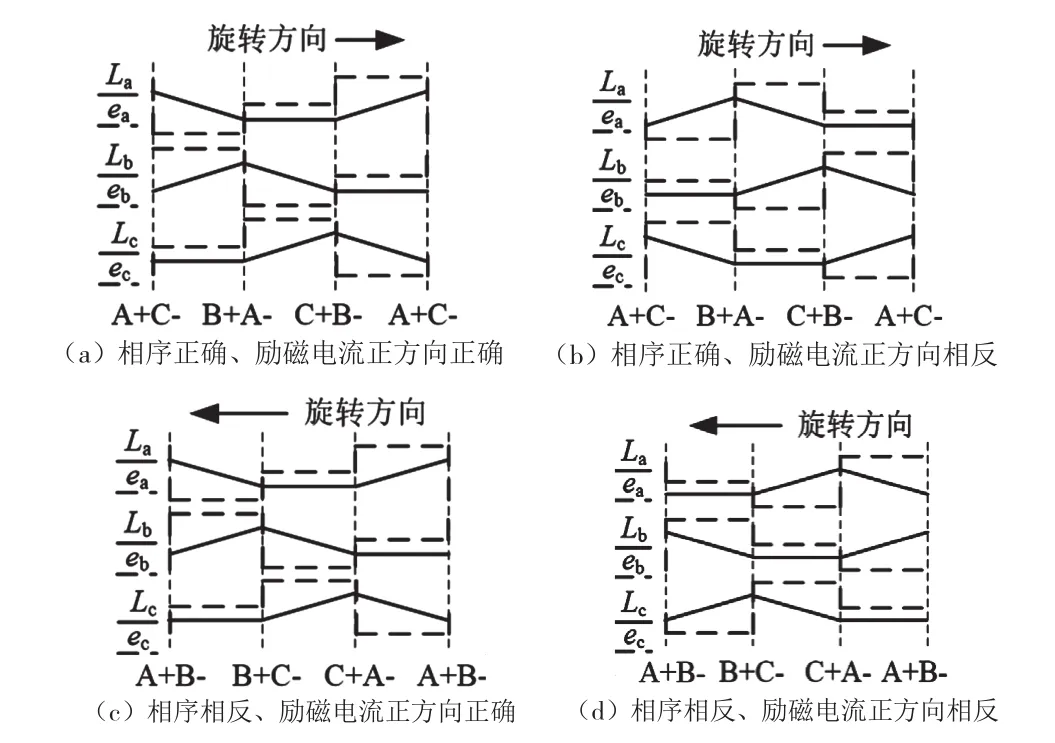
图6 旋转方向与相序和励磁电流正方向的关系
图6中La、Lb和Lc分别表示三相电感,某一相的电感与该相定子齿与转子齿接触面积成正比。ea、eb和ec分别为三相反电势,励磁电流正方向正确时,定义正旋转方向相电感增加时,反电势为正;励磁电流正方向相反时,定义正旋转方向相电感增加时,反电势为负。
图6(a)中,由A+C-向B+A-切换时,eb和ea分别为正和负,与电枢电流Ib和Ia分别为正和负相对应,合成功率P=ebIb+eaIa>0,使电机正向旋转,此过程中B相和C相均作功。图6(b)中,由A+C-向B+A-切换时,eb和ea分别为0和负,电枢电流Ib和Ia分别为正和负,合成功率P=eaIa>0,使电机正向旋转,此过程中仅A相作功。
图6(c)中,由A+B-向C+A-切换时,ec和ea分别为负和正,与电绕电流Ic和Ia分别为正和负相反,合成功率P=ecIc+eaIa<0,使电机反向旋转,此过程中C相和A相均作功。在图6(d)中,由A+B-向C+A-切换时,ec和ea分别为0和正,电绕电流Ic和Ia分别为正和负,合成功率P=eaIa<0,使电机反向旋转,此过程中仅A相作功。
3.2 相序识别方法
根据上述分析可知,电机的旋转方向只与相序有关,与励磁电流方向无关。因此,可以通过以下步骤确定绕组相序。
步骤1:无须考虑励磁电流方向,给励磁绕组通入励磁电流。
步骤2:对于电机三相输出线L1、L2和L3,令L1=A,假设L2=B和L3=C。
步骤3:使电流从A端进入电机,从C端出电机。
步骤4:使电流从B端进入电机,从A端出电机。
步骤5:使电流从C端进入电机,从B端出电机。
步骤6:观察步骤3至步骤5操作时电机的旋转方向,若电机的旋转方向与定义正方向相同,则L2=B和L3=C,若电机的旋转方向与定义方向相反,则L2=C和L3=B。
4 励磁电流正方向识别原理
电枢电流由C+B-向C+A-切换时,不同励磁电流方向下电机的锁定位置如图7所示。由图7(a)可知,在励磁电流正方向正确时,电机锁定位置均在转子齿与C相定子齿对齐位置附近,仅是电枢电流为C+B-时,转子略微偏右;在电枢电流为C+A-时,转子略微偏左。由图7(b)可知,在励磁电流正方向相反时,电枢电流为C+B-与电枢电流为C+A-情况下,电机锁定位置相差略小于120°的电角度。
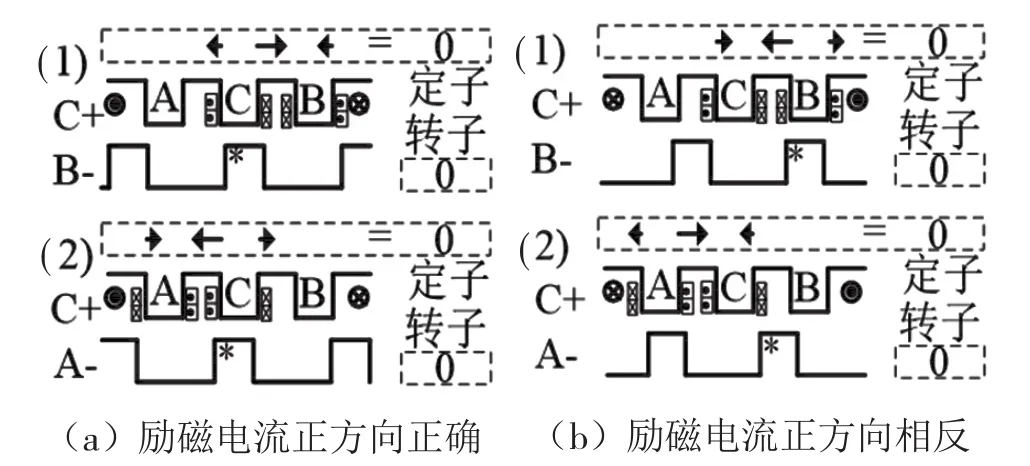
图7 励磁电流正方向识别原理
根据上述分析可知,对于励磁电流正方向正确时,电机位置主要取决于流过正电流的相绕组,与流过负电流的相绕组关系不大;对于励磁电流正方向相反时,电机位置主要取决于流过负电流的相绕组,与流过正电流的相绕组关系不大。因此,在相序确定之后,可以通过以下步骤确定励磁电流方向。
步骤1:任意选取1个励磁电流方向,给励磁绕组通入励磁电流。
步骤2:使电流从C端进入电机,从B端出电机,记录位置传感器读出的电角度θf1。
步骤3:使电流从C端进入电机,从A端出电机,记录位置传感器读出的电角度θf2。
步骤4:若θf1与θf2相差不大,则初选励磁电流正方向正确,若θf1与θf2相差接近120°,则初选励磁电流正方向相反,需要更改供电励磁电流方向。
5 零位校正原理
对于电励磁双凸极电机,通常定义电机的零位为转子齿刚开始滑入A相绕组定子齿的位置,即图7(a)中第(1)状态位置略偏左一点,图7(a)中第(2)状态位置略偏右一点。因此,在相序和励磁电流正方向确定之后,可以通过以下步骤确定电机零位。
步骤1:接正确方向给励磁绕组通入励磁电流。
步骤2:使电流从C端进入电机,从B端出电机,记录位置传感器读出的电角度θz1。
步骤3:使电流从C端进入电机,从A端出电机,记录位置传感器读出的电角度θz2。
步骤 4:按 Δθz=(θz1+θz2)/2确定位置传感器电角度偏差。
6 实验结果
在1台12/8结构的电励磁双凸极电极上进行试验,励磁电流为5 A,电枢电流为20 A,通过旋转变压器输出电机位置。
相序正确时,电枢绕组依次通入A+C-、B+A-和C+B-的电枢电流时,经旋转变压器输出的电角度如表1所示。由表1可知,相序正确时,无论是励磁电流方向是否正确,当电枢绕组依次通入A+C-、B+A-和C+B-的电枢电流时,电角度均为增加。

表1 相序正确时电角度测量值 单位:(°)
相序相反时,电枢绕组依次通入A+B-、C+A-和B+C-的电枢电流时,经旋转变压器输出的电角度如表2所示。由表2可知,相序相反时,无论是励磁电流方向是否正确,当电枢绕组依次通入A+B-、C+A-和B+C-的电枢电流时,电角度均为减少。

表2 相序相反时电角度测量值单 单位:(°)
表1和表2所示结果与理论分析一致,表明理论分析正确。实际进行相序判断时,无论获得的是表1或表2的数据,根据旋转方向均能实现相序判断。
在完成相序识别后,电枢绕组依次通入C+B-、和C+A-的电枢电流时,经旋转变压器输出的电角度如表3所示。表3测试结果表明励磁电流正方向正确时,2组电枢绕组电流下的电角度差为14°;励磁电流正方向相反时,2组电枢绕组电流下的角度差为132°。测量结果与理论分析一致。因此,根据2组电枢绕组电流下的电角度较小,可实现励磁电流正方向的识别。

表3 励磁电流正方向识别的电角度测量值 单位:(°)
在完成相序识别和励磁电流正方向识别后,根据电枢绕组依次通入C+B-和C+A-的电枢电流时的旋转变压器输出电角度分别为129°和115°,按Δθz=(θz1+θz2)/2,θz1=129°和θz2=115°可计算出电机零位与旋转变压器的零位差Δθz为122°。
7 结 论
综上所述,在任意电机的初始位置下,在励磁电流正方向正确的情况下,电机锁定状态为转子齿与通入正向电枢电流的定子齿基本对齐;在励磁电流正方向相反的情况下,电机锁定状态为转子齿与通入负向电枢电流的定子齿基本对齐。根据电机的旋转方向与相序相关,与励磁电流正方向无关,可以根据特定电枢绕组通电顺序下电机的旋转方向确定相序。在相序确定后,根据电枢绕组依次通入C+B-和C+A-的电枢电流时,2组电枢绕组电流下的电角度差相差较小或相差120°左右来判断励磁电流正方向正确或相反。在相序和励磁电流方向确定后,根据电枢绕组依次通入C+B-和C+A-的电枢电流时2组位置传感器输出的电角度值,对其取平均作为电机零位与位置传感器零位的偏差值,实现电机零位校正。
猜你喜欢
弹道学报(2022年3期)2022-10-08
大电机技术(2022年3期)2022-08-06
火力与指挥控制(2022年5期)2022-07-25
科学与信息化(2021年12期)2021-12-27
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
炼油技术与工程(2021年4期)2021-05-03
弹箭与制导学报(2020年1期)2020-07-09
客车技术与研究(2019年5期)2019-10-24
弹箭与制导学报(2019年6期)2019-06-24