无人值守变电站的智能视频监控技术研究
2023-01-16 10:08骆丰
通信电源技术 2022年18期
骆 丰
(安徽南瑞继远电网技术有限公司,安徽 合肥 230088)
0 引 言
随着智能技术的不断发展和进步,无人值守变电站智能视频监控技术的应用受到了更多的关注,通过充分发挥智能视频监控技术在变电站防火防盗中的作用,促进变电站多元管理工作的进步。
1 无人值守变电站智能视频监控技术应用原理
在无人值守变电站智能视频监控技术体系中,为了更好地锁定运动目标,需要结合视频图像进行实时性运动目标特征的提取和定位,有效完成目标位置、运动方向、运动速度等基础参数的汇总,为更好地提升无人值守变电站多元管理质量创设良好的技术平台。在技术应用过程中,主要是基于运动目标跟踪要求开展相应工作[1]。
1.1 运动目标特征提取
结合Hu不变距完成图像特征提取工作,在实际特征分析中主要实现人员、动物、干扰物、火焰等要素的区分和处理。例如,对火焰的颜色特征进行提取,按照亮度阈值进行划分,当火焰像素点亮度超出某一阈值范围时,就能实现相应的判定和评估。此外,对颜色各分量和红色饱和度等进行测试,以此评估待测试目标的相关特征。
1.2 运动目标跟踪
结合运动目标的具体情况,按照特征匹配、区域匹配以及模型匹配等要素完成相关判定工作,有效实现运动目标跟踪管理,维持良好的分析机制,从而更好地提升目标识别的实效性[2]。
1.2.1 基于特征匹配
在检测过程中实时提取运动目标的1个或多个特征完成跟踪管理,无论目标属于刚性还是非刚性,图像序列中采样时间的间隔固定,依据特征完成运动形式上的提取和数据对比,从而更好地评估运动目标跟踪结果[3]。运动目标跟踪过程中,借助运动中不变性质的特征完成实时性跟踪处理,有效实现特征提取和特征匹配。
1.2.2 基于区域匹配
利用运动目标连通区域的共同性特点,将其作为最终跟踪特征完成跟踪分析工作。这种处理方式会借助计算机当前帧图像的目标特征信息和原始目标信息进行相关性对比,从而获取跟踪目标的实时性位置。需要注意的是,在基于区域匹配的跟踪方法中,为了更好地提升跟踪效果,要将区域匹配和分割匹配作为核心,有效改善运动目标跟踪效果。
1.2.3 基于模型匹配
应用先验知识特征完成建模处理,同时结合连续图像的实际情况完成模型跟踪和目标评估。这种方法最大的特点就在于跟踪的精准度较高,尤其是对刚体目标而言,运动状态直接转变为旋转、平移等操作,从而有效实现目标跟踪效果。目前,基于模型匹配的运动目标跟踪中应用最为广泛的算法处理模式是Mean Shift算法,通过将视频运动目标跟踪转变为模型最匹配处理模式,确保能快速实现目标定位[4]。
2 无人值守变电站智能视频监控技术应用方案
在无人值守变电站智能视频监控技术应用中,要结合实际智能管理控制标准落实相关工作,秉持全过程设计原则,发挥相应技术的优势作用,实现良好的监控技术应用效能。
2.1 设计原则
基于智能视频监控技术应用管理规范,践行先进性、实用性以及可靠性原则,开展技术设计处理工作。
秉持先进性原则,采取最新技术和产品,在有效提高系统应用水平的同时,保证其前瞻性和发展潜力满足要求[5]。
秉持实用性原则,优选满足建设单位功能需求和投资预算的产品,最大程度上解决用户实际问题,确保经济效益和安全效益和谐统一。
秉持可靠性原则,满足7×24 h的监控管理需求,确保维护和检修工作顺利展开。
2.2 整体布局
在无人值守变电站智能视频监控技术设计方案中,将监控系统作为基础,通过前端变电站智能视频分析服务器和中心运行管理报警平台的应用,维持整体实时性视频检测的合理性和规范性。在变电所室外重点区域进行智能技术处理,针对变电所周围区域落实入侵检测分析模式,针对监控区域范围内徘徊或滞留等行为予以严格处理,并且及时报警[6]。在变电所室内安装入侵检测传感器,确认有人进入监控区域时及时报警并上传监控中心。将报警管理平台设置在监控中心运行管理单元,重点完成前端变电站智能视频分析服务器的应用工作,同时有效实现规则管理,及时进行报警信息的分类存储。无人值守变电站智能监控中心布局结构如图1所示。
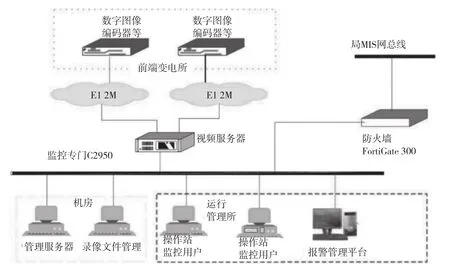
图1 无人值守变电站智能监控中心布局结构
在前端变电站中,智能视频分析服务器要结合预设的规则完成摄像机输入视频图像的处理,并且及时跟踪可疑目标,保证自动跟踪和预警控制的合理性。在确定目标后进行规则判定,以便及时触发现场的告警系统,借助电力专网传输报警信息的方式实现运行管理实时性管控。一般情况下,要借助声音提示和文字提示的方式提醒监控人员。系统在平台实时性浏览管理的基础上实现入侵实时性报警和抓拍,提高监控管理的实效性水平[7]。
2.3 设备配置
结合无人值守变电站智能视频监控技术的应用要求配置对应的设备和平台,以保证相关工作都能在规则要求内逐步落实,提升具体问题具体分析的实效性,维持目标跟踪和目标定位的管控效果。
利用智能视频分析服务器实现7×24 h全天候无人值守的监督管理,通过事件设定配合检测识别的方式在特定触发事件发生时完成告警,最大程度上减少资源损耗,提高整体监控管理工作的实效性[8]。
报警平台主要包括前端检测和报警窗口,能够实现历史报警信息的实时性查询和管理,按照位置电位、点位报警状态等开展具体工作,最大程度上提高实时性分析的准确性和可控性。
2.4 技术要点
2.4.1 运动目标检测、识别与跟踪
目标检测工作中,借助Mean Shift算法完成监控区域内运动目标的定位处理,对监控区域运动目标予以识别和评估,识别出人员、车辆或其他物体的具体信息后建立目标跟踪模式。目标跟踪处理环节中,借助对运动目标轨迹定位的方式就能有效描述具体的运动过程,确保智能视觉分析工作顺利开展[9]。
2.4.2 绊线穿越检测
绊线穿越检测体系中,结合实际情况选取单向或双向穿越绊线结构,保证每一条绊线都能符合实际应用规范。一般而言,用户直接在视频上绘制绊线来进行规则预设,在完成标识、起点坐标、终点坐标以及绊线类型等内容编码后,就能有效完成目标检测工作。
2.4.3 区域入侵检测
针对独立入侵、联合入侵的目标设定防区,有效建立完整的防区应用控制模式,确保多个防区位置不会出现重叠现象,并且不会对后续目标检测工作产生影响,提升区域入侵检测应用管理效果。
2.4.4 物品防盗检测
针对监控防区内的内容进行自动检测,并结合实际情况发出对应警告[10]。通过在无人值守变电站应用智能视频监控技术,及时实现运动目标的跟踪分析和检测,提高现场证据跟踪管理的及时性和规范性。
3 结 论
在无人值守变电站日常管理工作中,要充分发挥智能视频监控技术的优势作用,打造更加科学合理的应用平台,确保运动目标实时性评估分析满足预期要求,提高目标识别的合理性和规范性,为无人值守变电站工作效率的提升予以支持,促进变电站可持续健康发展。
猜你喜欢
电子制作(2019年10期)2019-06-17
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
北京航空航天大学学报(2017年12期)2017-04-23
岷峨诗稿(2017年4期)2017-04-20
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
科学大众(中学)(2016年8期)2016-05-14