
一类整数阶分数阶单摆不确定混沌系统的自适应滑模同步
2023-01-16 03:46王建军毛北行
东北师大学报(自然科学版) 2022年4期
王建军,毛北行
(郑州航空工业管理学院数学学院,河南 郑州 450015)
0 引言
混沌现象在物理学中大量存在,学者们对于混沌同步控制问题的研究取得了一系列成果[1-4].滑模控制具有良好的鲁棒性,易于实现,已成为当下研究的热点.文献[5]采用积分滑模方法研究了一类整数阶分数阶单摆系统的同步问题;文献[6]研究了分数阶大气混沌系统的比例积分滑模同步问题;文献[7]采用有限时间滑模方法,对于Victor-Carmen系统设计新型滑模面,实现了该系统的快速高效收敛;文献[8]采用滑模控制和反演控制相结合的策略,研究了不确定分数阶Genesio系统的同步问题;文献[9]研究了一类单摆系统的终端滑模同步问题;文献[10]采用自适应滑模控制方法研究了一类具有不确定项与外界干扰情形下多混沌系统的自适应滑模同步问题.单摆系统是常见的一种物理现象,具有周期性、等时性等丰富的动力学特征,在机械传动、仪表控制等领域有着非常重要的作用.本文针对含有不确定项和外界干扰的一类整数阶分数阶单摆系统,采用自适应滑模控制理论,设计了适应规则及一种简洁滑模面,实现了驱动-响应系统的滑动模态混沌同步.
1 主要结果
定义1 Caputo分数阶导数定义为[11-12]

考虑如下分数阶有阻尼单摆混沌系统:
(1)
取g=9.8,l=1,γ=0.46,q=0.86时出现吸引子,系统的相图如图1所示.

(a)x1相图 (b)x2相图 (c)x1,x2吸引子图
其响应系统设计为
(2)
其中:Δfi(y1,y2,t)为不确定项,di(t)为有界外扰,ui(t)为控制器.
定义误差:e1(t)=y1(t)-x1(t),e2(t)=y2(t)-x2(t),则误差系统为
(3)
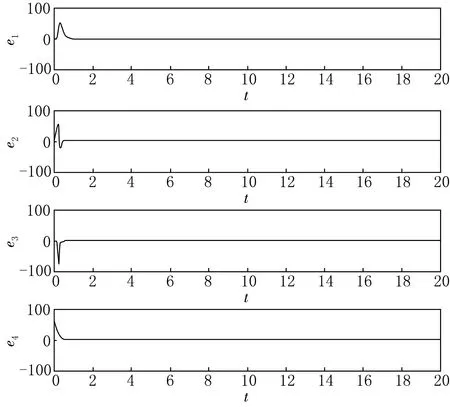
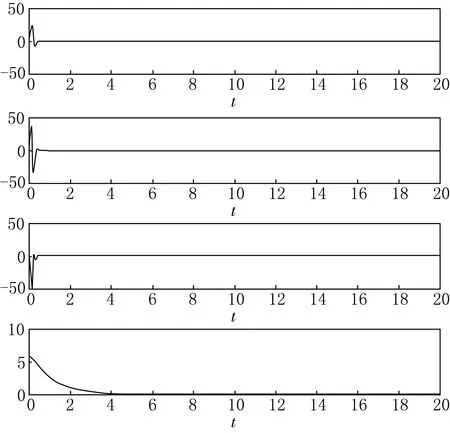
假设1 设不确定项Δif(y1,y2,t)和外部扰动di(t)有界,即存在未知参数mi,ni>0使得|Δfi(y1,y2,t)| 定理1 在假设1条件下,设计滑模面si=ei(t),(i=1,2)选取控制器: 由引理2有si→0. 考虑有阻尼的整数阶单摆系统: (4) 以上述系统作为驱动系统,其响应系统设计为: (5) 其中:Δfi(y1,y2,t)为不确定项,di(t)为有界外扰,ui(t)为控制器. 定义误差e1(t)=y1(t)-x1(t),e2=y2(t)-x2(t),得到误差系统: (6) 定理2 在假设1条件下,设计滑模面si=ei(t)(i=1,2),选取控制器 证明当状态变量位于滑模面上时si=0⟹ei=0. 以不确定分数阶、整数阶单摆混沌系统为例. 设计系统参数为g=9.8,l=1,γ=0.46,α=0.86,Δf1(y1,y2,t)=cos(2πy2),d1(t)=0.2cost.Δf2(y1,y2,t)=cos(2πy1),d2(t)=0.1sint. 误差曲线如图2—3所示,由图2—3中可以看到,初始时系统的误差距离坐标原点较远,但随时间推移系统的误差逐渐趋于一致,分数阶系统取得同步的所需时间比整数阶更短,说明分数阶建模的优越性. 图2 定理1中的系统误差 图3 定理2中的系统误差 研究了整数阶、分数阶单摆不确定混沌系统的自适应滑模同步,得到了分数阶单摆不确定混沌系统取得自适应滑模同步的充分性条件,数值仿真验证了方法的正确性.分数阶单摆不确定混沌系统的有限时间滑模同步是下一步需要考虑的课题.




2 数值仿真

3 结论与展望
猜你喜欢
中学生数理化(高中版.高考理化)(2020年5期)2020-05-22
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21
中国惯性技术学报(2019年6期)2019-03-04
中等数学(2018年12期)2018-02-16
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
小朋友·快乐手工(2009年5期)2009-06-11
物理教学探讨(2009年4期)2009-05-25
中学生数理化·高二版(2008年9期)2008-06-17
