不同测站GNSS系统时差监测预报结果比较分析
2023-01-18 10:07马佳慧袁海波张继海张健陈梦实李宗源
时间频率学报 2022年4期
马佳慧,袁海波,张继海,张健,陈梦实,李宗源
(1.中国科学院 国家授时中心,西安 710600;2.中科科学院大学,北京 100049)
0 引言
四个全球卫星导航系统性能不断提高,其在信号覆盖、性能指标等方面各有千秋。为了提高导航、定位和授时服务的性能,众多研究机构开展了四个全球导航系统间的兼容与互操作研究,促进了多系统融合导航定位和授时发展。同时联合国外空司成立的国际全球卫星导航系统委员会(International Committee on Global Navigation Satellite Systems,ICG)多年来一直致力于推进这项工作[1]。
随着技术的发展,用户对不同观测环境下获得的位置、导航和时间信息的及时性和准确性都有了更高的要求,卫星导航系统兼容与互操作就成为卫星导航系统发展的必然需求,而作为卫星导航系统兼容与互操作的前提之一的系统间时差监测与预报精度的要求也越来越高。当前卫星导航系统时间互操作技术研究主要包括两个方面,一是导航系统间的时间偏差监测技术,即导航系统时差监测技术;另一个是导航系统时间偏差的预报方法。
中国科学院国家授时中心(National Time Service Center,NTSC)守时工作组在2019年ICG大会上公布了使用单站法,多站法和时间链路比对法的监测结果。单站法具有系统结构简单,易于搭建,维护成本低,监测结果实时性高,监测结果精度高等优势,因此单站法目前已经被大多数的GNSS(Global Navigation Satellite System)供应商采用。全球众多机构也对不同卫星导航系统间的时差开展了长期监测。本文选择中国科学院国家授时中心、德国联邦物理技术研究院(Physikalisch-Technische Bundesanstalt,PTB)和比利时皇家天文台(Observatoire Royal de Belgique,ORB)的监测数据,开展单站时差监测研究分析。
在多系统兼容互操作中因监测数据具有一定的滞后性而无法满足用户应用需求,用户需要提前获得某个时间段的系统间时间偏差,并对偏差做出修正。因此,需要通过预报算法建立预报模型,并将预报结果以模型播发给用户或者通过网络直接发播给用户。本文对处理后的监测数据进行预报算法实验,并对预报算法的结果进行比较和分析,为下一步建立预报结果的播发提供技术支撑。
1 监测方法
系统间时差监测现常用的监测方法有单站监测法,多站监测法和时间比对链路监测法。本文的所有数据全部是通过单站监测法测量和计算得到的。
1.1 单站法与多站法
单站法监测时差核心技术是采用单点定位的原理,地面站接收伪距信号,解算出星地钟差,即:
P=ρ+c(dt-dT)+dorb+dtrop+dion+dmult+ερ,
(1)
式(1)中,P是观测的伪距,ρ是卫星到接收机的直线距离,c是光速,cdT是卫星钟改正量,dorb是卫星轨道误差,dtrop是电离层改正,dion是对流层改正,dmult是多径误差,ερ是未知噪声量。当接收机接入本地参考时钟和频率信号时,cdt是接收机时差改正量,其中的dt为要解算的星地钟差值。dt的解算公式为
(2)
为了消除分布在距地面70~1 000 km的电离层对信号传播的影响,使用双频接收机可以对电离层时延进行实时锁定,经双频无电离层组合后的伪距如式(3)所示:
(3)
式(3)中,f1和f2为用于得到观测值的两个频点,两个P1和P2是使用f1和f2这两个频点信号的观测伪距,PIF为使用双频电离层计算的伪距。
经过上述处理和计算,得到一个导航系统的高精度星地时差。即:
Tr-Ts=t1,
(4)
式(4)中,Ts是导航系统的系统时间,Tr是接收机的本地参考时间,t1是星地时差。
同理,可以得到另一导航系统的高精度星地时差,两个结果做相减处理即可得到不同系统间的系统时差,即:
Tr-Ts2-(Tr-Ts1)=Ts1-Ts2,
(5)
式(5)中,Tr-Ts1是一个系统星地时差,Tr-Ts2是另一系统的星地钟差,Ts1-Ts2是系统间系统时差。
单站法的整体构成如图1所示。主要分为卫星,接收机和本地时间频率参考信号3个部分[2]。
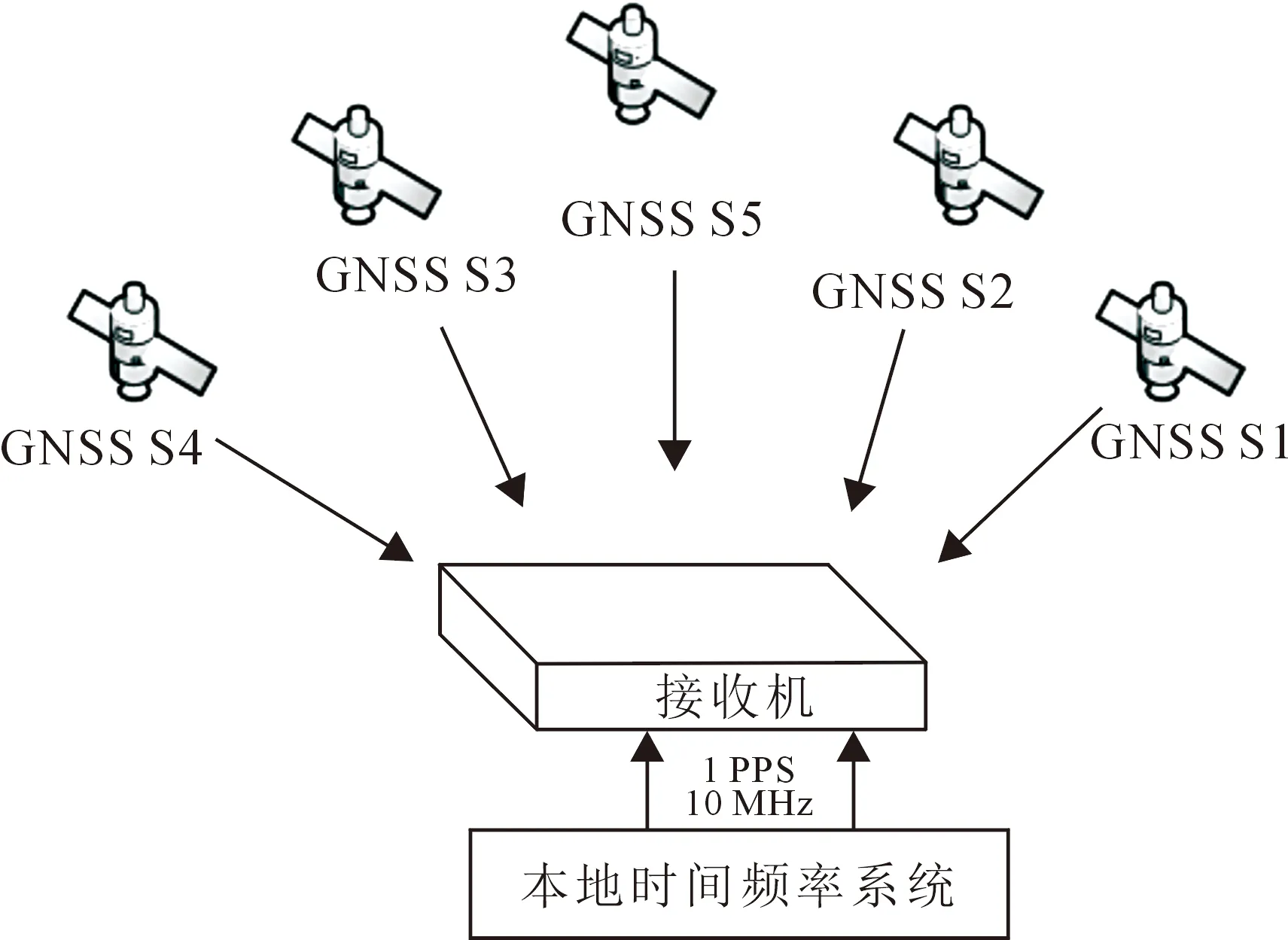
图1 单站法整体构成图
从图1可见,单站法构成结构较为简单,其核心设备是一台多模测量型GNSS接收机。多站法是单站法时差监测技术的自然拓展,多站法时差监测技术基于多个单站观测数据,在站间时间比对链路、站间数据交互的支持下,通过站间时间比对处理、多站观测结果的综合处理,进而获得GNSS系统间时差监测结果。多站法和核心处理技术与单站法类似,此处不再进行描述。
1.2 时间比对链路监测法
时间比对链路法,全称时间比对链路时差监测法,核心技术是利用时间传递(比对)链路将两个GNSS系统时间直接或间接联系起来,通过时间比对链路的直接计算或间接计算后归算出两个导航系统时间的偏差。时间比对链路法的整体结构如图2所示。图中本地时间频率系统为导航系统时间溯源参考。时间比对链路法监测精度主要依赖于所采用的时间比对链路的特性。当前可用的时间比对链路包括GNSS 共视、GNSS 全视、GNSS PPP(精密单点定位)和卫星双向时间传递(比对)技术。本文主要基于单站时差监测数据,通过不同的时差预报模型,开展导航系统时差的预报与分析,以提高GNSS时差预报的性能。

图2 时间-链路监测法
2 预报算法与策略
监测数据的结果带有时间属性,监测结果是某一时间段的时差,从长期来看,系统时差在纳秒量级波动。从短期来看,这种纳秒的波动是无序的,且对于高精度定位的应用,时间精度必须达到纳秒量级[4],因此,精确地预报未来时刻的系统时差值,是GNSS及兼容与互操作的基础。从算法的复杂程度和算法的普适度考虑,本文的预报算法决定采用差分自回归移动平均模型(autoregressive integrated moving average model,ARIMA),ARIMA模型是用在单变量时间序列预测最广泛的算法之一,且模型推演和结构简单。考虑到实际工程的可靠性和稳定性要求,预报策略采用固定滑窗策略[3]。
2.1 预报算法
2.1.1ARIMA模型
ARIMA是被广泛应用的成熟的时间序列预测方法之一[4]。ARIMA是将自回归模型、移动平均模型和差分法结合。模型结构如下:
(6)
式(6)中,∇为差分算子,B为延迟算子,xt为时间序列数据,εt为噪声,E为均值,var为方差,φ和Θ为系数集,模型需要设置的参数d表示使非平稳序列成为平稳序列的差分次数,参数q表示移动平均数,参数p表示自回归数。
2.1.2平稳性检验
由于ARIMA预报的数据需要是平稳数据,因此要对数据事先进行平稳性检验。如果数据不是平稳性序列,要进行平稳化处理,本文选择差分平稳化法。差分的次数取决于数据本身。
∇n=∇(n-1)(yt-yt-1)。
(7)
某些数据集需要多次差分运算才能达到平稳状态,式(6)的d的值就是差分运算的次数,式(6)中参数p通过自相关图估计获得,参数q通过偏相关图估计获得。
2.2 预报策略
从实际工程的角度考虑,我们设计了两种运行模式。两种运行模式分别为正常运行模式和故障运行模式。固定滑窗预报策略是在正常运行模式下,从被预报点向前选取一定长度的历史真实时差数据作为ARIMA模型的训练集,每次预报未来5个时刻的时差数据,但是发给用户供用户使用的是第1个预报数据的预报值或预报值的模型参数,其余的4个预报数据作为备用[5]。当获得下一个真实钟差时,真实值代替预报值并加入训练数据中,训练集的第1个训练数据被移除,重新组成训练数据并为下一次预报做好准备。当系统出现故障,系统自动切换至故障运行模式,在故障运行模式下,预报程序将被停止,停止之前的最后一次预报的5个预报值会依次传送给用户,若在5个预报值使用完之前系统恢复则回归正常运行模式,若5个值使用完后系统故障依然没有被排除,则系统连续使用最后一个预报值,直到故障被排除,系统回归正常运行模式。
3 实验结果
3.1 监测结果
本文采用单站法时差监测技术,选取PTB、ORB和NTSC三个实验室的GNSST-UTC(k)的结果,UTC(k)是三个实验室各自保持的本地时,通过第2节描述的解算过程解算获得三个实验室各自的GGTO(GNSS to GNSS time offset)结果[6]。
数据来自2021-07-01/07-05的三个实验室的GNSST-UTC(k)的解算结果。图3,图4和图5将三个实验室的钟差监测结果两两放在同一图中互相比较。由于各守时实验室所处的环境和硬件设备上的不同,实验室采用的多模接收机绝对校准情况不同,各实验室的监测结果之间存在固定的常数偏差,为了更明确对比监测结果的一致性且方便读者阅读,在绘图时将部分监测数据进行了常数平移。
本文解算GST(Galileo System Time)与GPST(Global Position System Time)之间的系统时差和BDT(BeiDou Time)与GPST之间的系统时差结果并进行展示和分析。
图3是使用NTSC和PTB的数据计算GST-GPST的的监测结果,蓝色点代表NTSC监测结果,为了能够直观地对比,将NTSC监测的GST-GPST向下平移了40 ns,红色点代表PTB的监测结果。
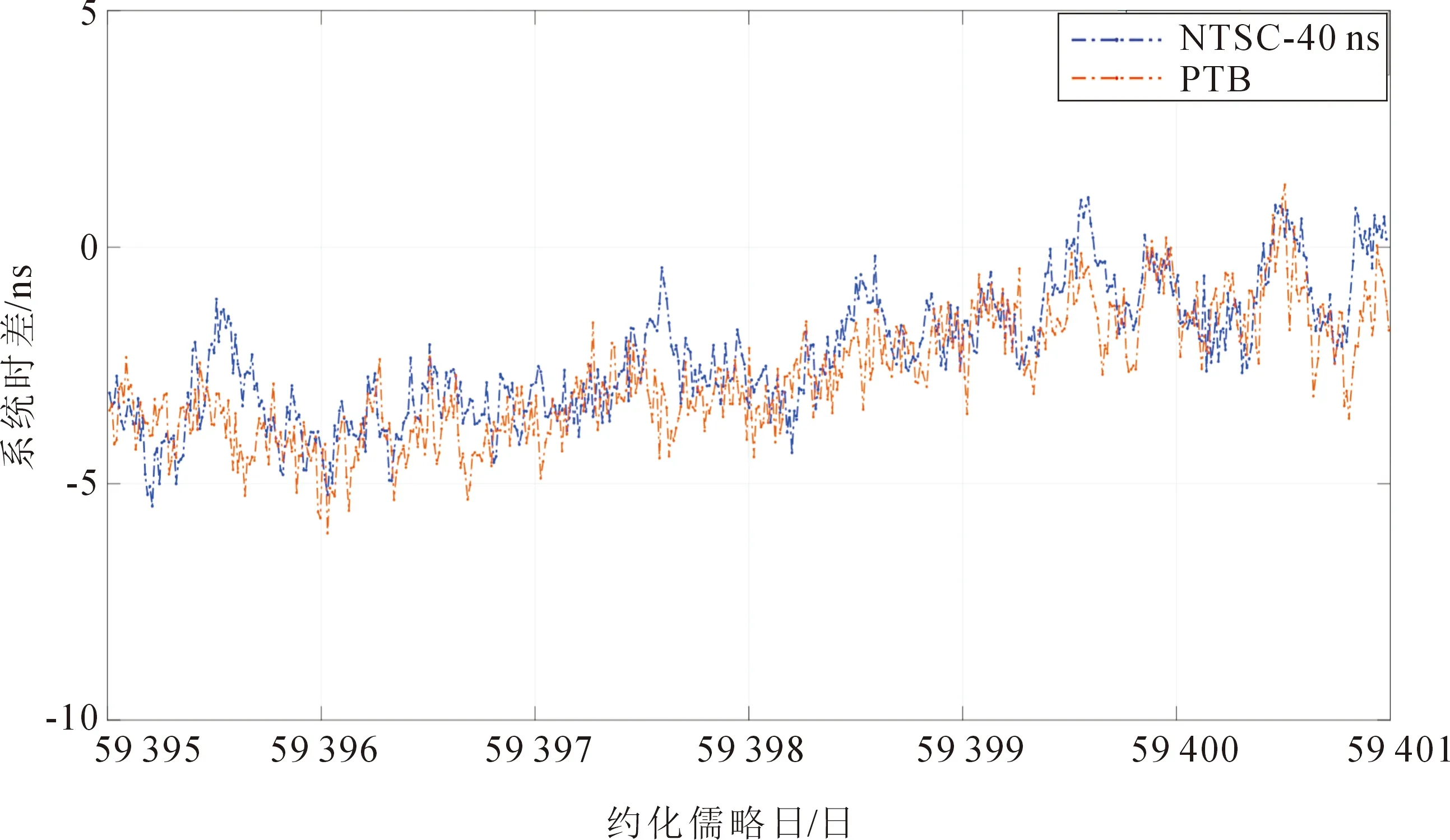
图3 NTSC和PTB的GST-GPST
图4是使用ORB和PTB的数据计算的GST-GPST监测结果,红色点代表PTB的监测结果,蓝色点代表ORB的监测结果。

图4 ORB和PTB的GST-GPST
图5是使用ORB和NTSC的数据计算的GST-GPST监测结果,红色是NTSC的监测结果,为了能够直观地对比,将NTSC监测的GST-GPST向下平移50 ns,蓝色是ORB的监测结果。

图5 ORB和NTSC的GST-GPST
图6是使用NTSC和PTB数据计算的关于BDT-GPST的监测结果。蓝色的点是NTSC的监测结果,红色的点是PTB的监测结果。
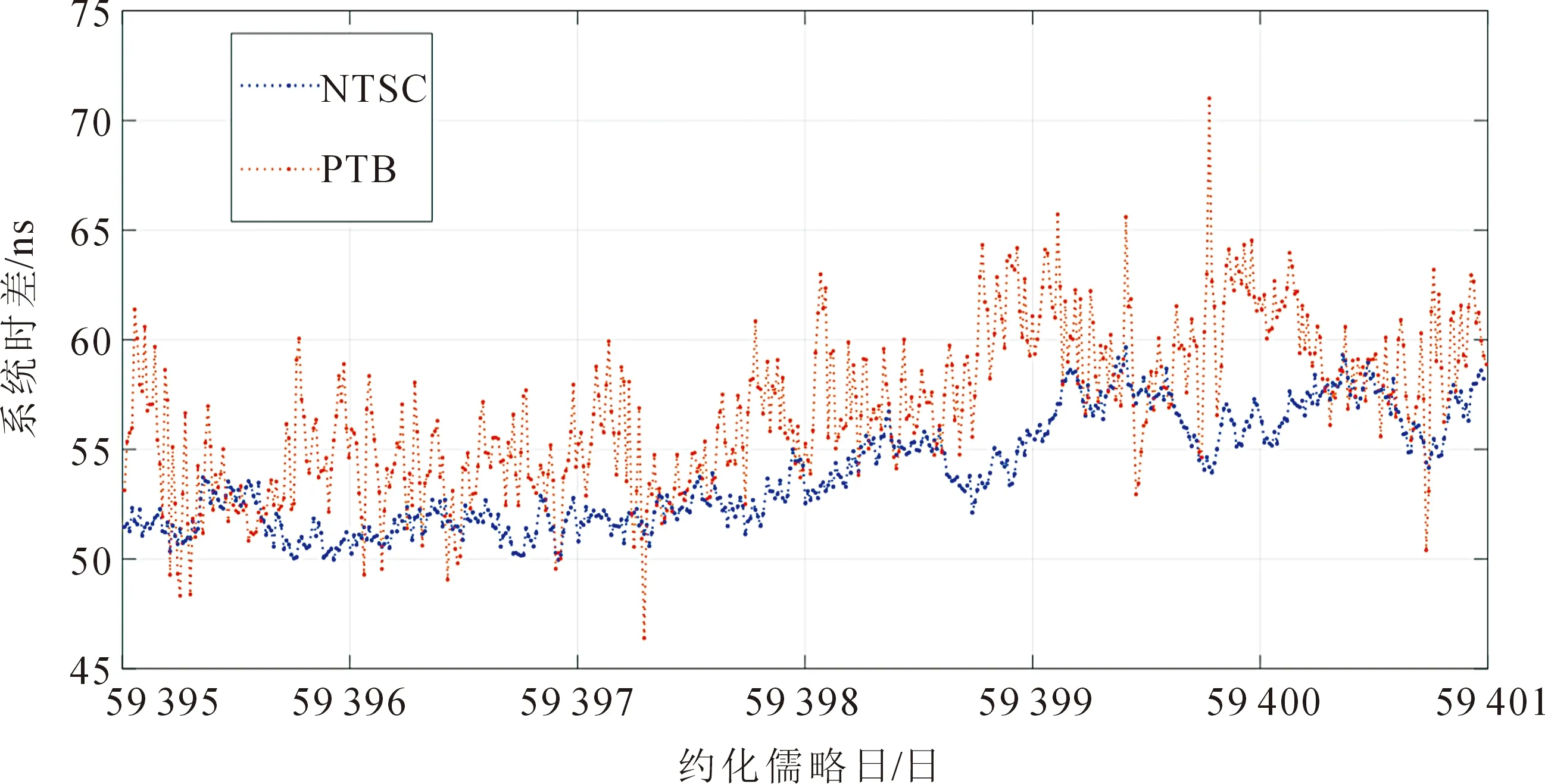
图6 NTSC和PTB的BDT-GPST
图7是使用ORB和PTB数据计算的关于BDT-GPST的监测结果。红色的点是PTB的监测结果,蓝色的点是ORB的监测结果。ORB的观测结果有3处明显的跳变,分析可能是由于接收路径的硬件发生故障。
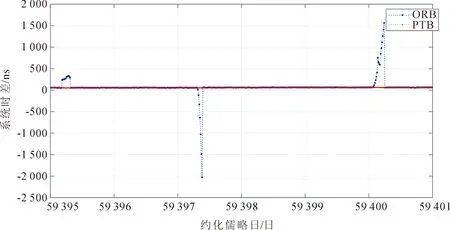
图7 ORB和PTB的BDT-GPST
由于ORB的数据出现了跳变,为了看清楚数据变化,将图7儒略日59 397发生跳变之后到儒略日59 400发生跳变之前的数据放大到图8,红色的是PTB监测结果,蓝色的是ORB监测结果。

图8 放大之后的ORB和PTB的BDT-GPST
图9是使用ORB和NTSC数据计算的关于BDT-GPST的监测数据,红色点是NTSC监测数据,蓝色点是ORB监测数据,ORB的观测结果有3处明显跳变。

图9 ORB和NTSC的BDT-GPST
将图9儒略日59 397发生跳变之后到儒略日59 400发生跳变之前的数据放大到图10,红色是NTSC监测结果,蓝色是ORB监测结果。
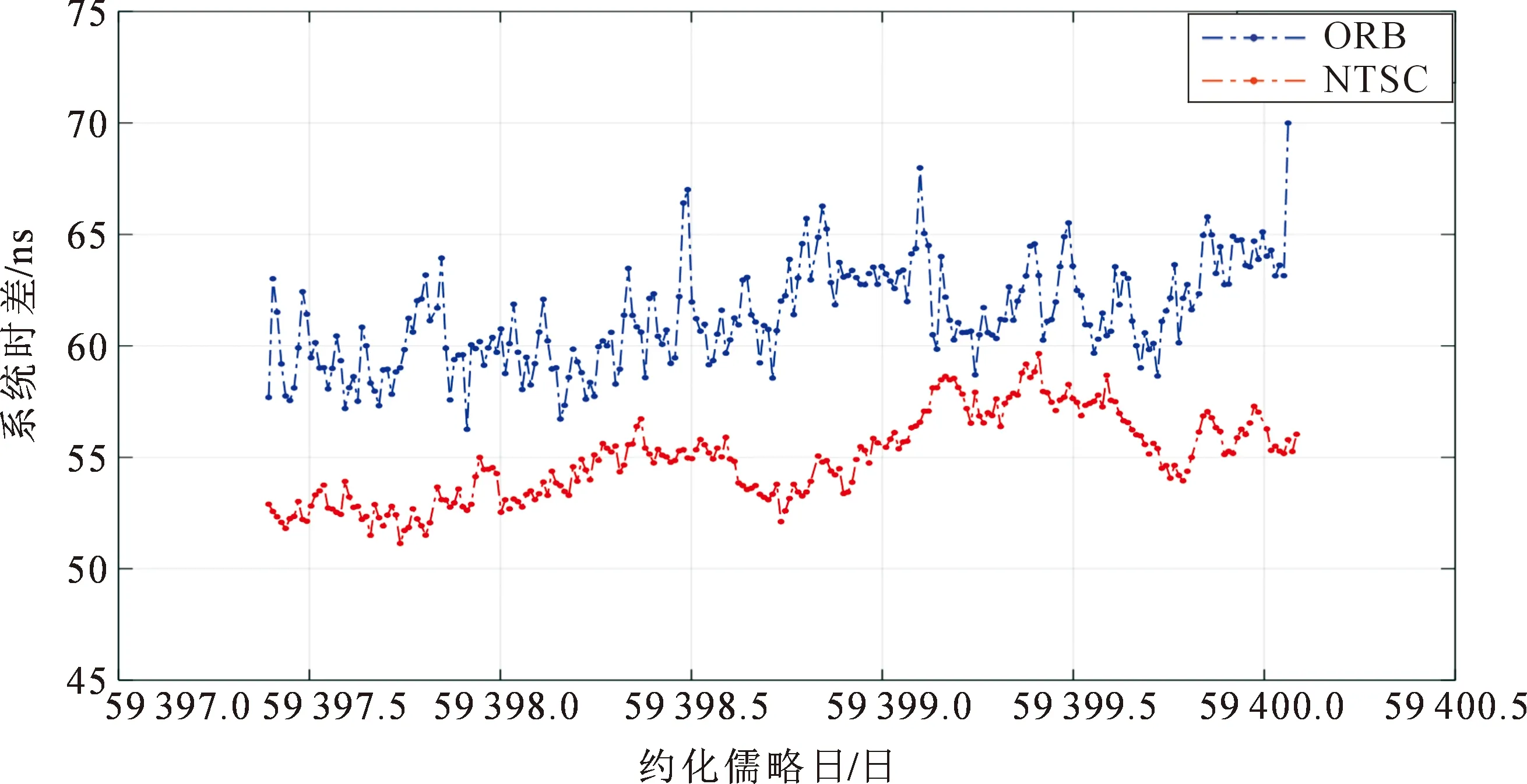
图10 放大之后的ORB和NTSC的BDT-GPST
在采用单站法监测时,由单站法原理和上述实验结果可知,在接收机被精确校准的前提下UTC(k)的稳定性和硬件噪声是影响监测结果性能的重要因素[7]。
3.2 预报结果
采用固定滑窗策略和ARIMA算法对来自三个实验室的监测数据进行预报实验,选取2021-07-01/07-02中的90个数据点作为实验数据。实验结果如下所示。
图11(a)是根据NTSC的BDT-GPST的监测数据的预报结果,蓝点代表监测数据,红点代表预报数据,预报曲线和真实曲线变化规律大致稳合。图11(b)是本次实验结果的残差,残差的绝对值结果在0.1~1.8 ns之间,RMSE=0.747 4 ns。

图11 NTSC BDT-GPST的监测数据的预报结果和残差绝对值结果
图12(a)是根据NTSC的关于GST-GPST的预报结果,蓝点代表监测数据,红点代表预报数据,预报值曲线和真实值曲线变化规律大致相合。图12(b)是残差图,残差的绝对值结果在0~1.6 ns之间,RMSE=0.740 0 ns。
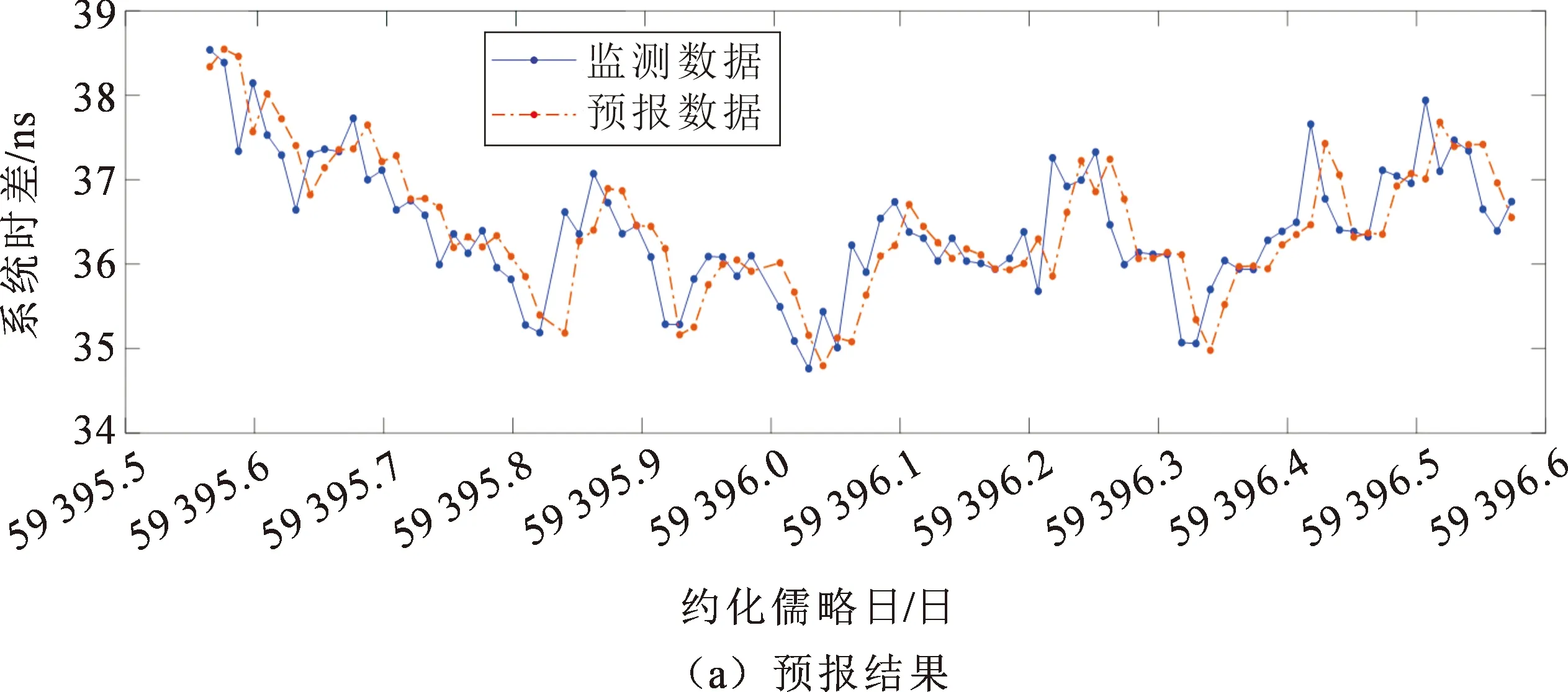
图12 NTSC GST-GPST的预报结果和残差绝对值结果
图13(a)是来自ORB的BDT-GPST的监测数据的预报结果,蓝点代表监测数据,红点代表预报数据,因监测结果的跳变,预报值有一部分和监测值出现较大偏差。图13(b)是预报的残差结果,残差结果出现连续的明显跳变,残差绝对值在0~20 ns之间,RMSE=5.868 4 ns。
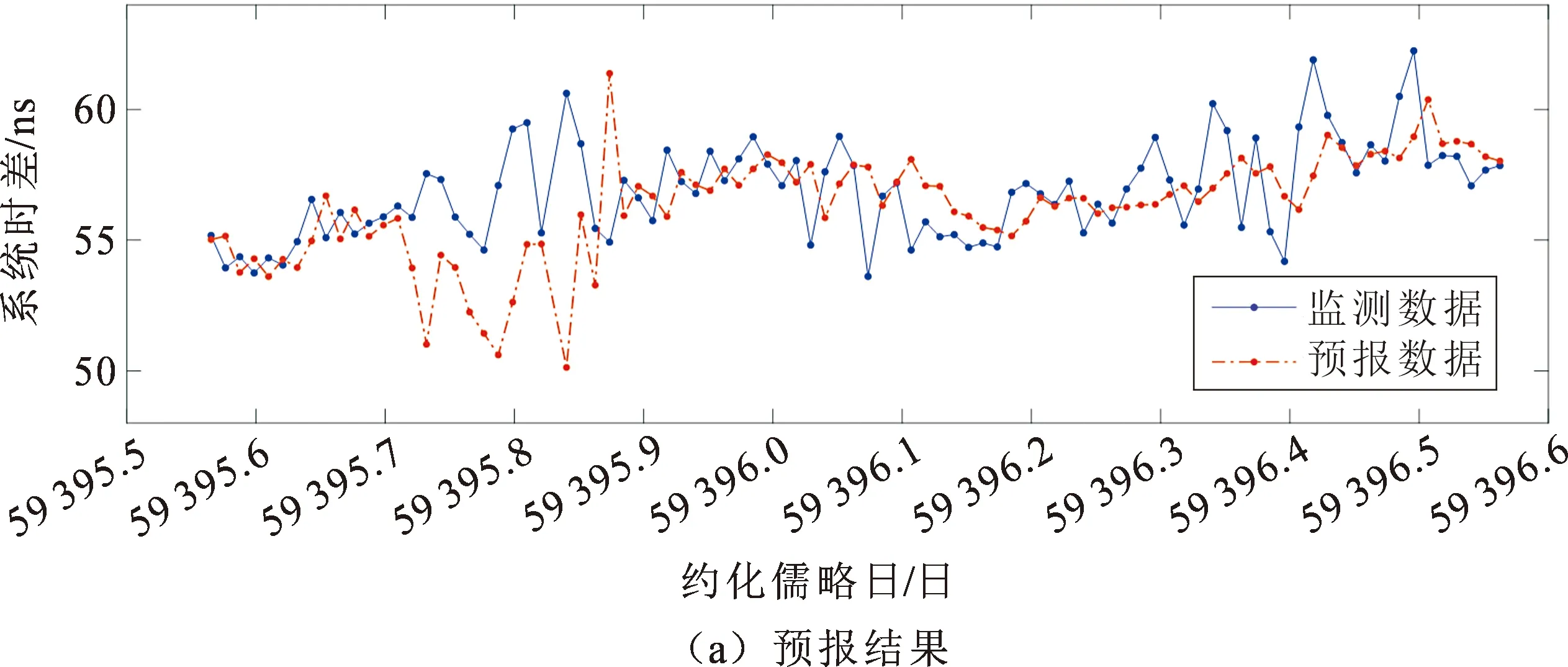
图13 ORB BDT-GPST的监测数据的预报结果和残差绝对值结果
图14(a)是来自ORB关于GST-GPST的监测数据的预报结果,蓝点代表监测数据,红点代表预报数据,预报曲线和监测曲线变化规律大致相合。图14(b)是残差绝对值结果,在0~1 ns之间,RMSE=0.518 4 ns。
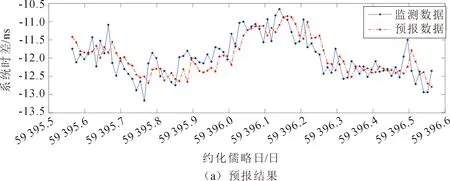
图14 ORB关于GST-GPST的预报结果和残差绝对值结果
图15(a)是使用PTB的BDT-GPST的监测数据计算的监测结果,蓝点代表监测数据,红点代表预报数据。虽然预报曲线和监测曲线变化规律大致相符,但从图15(b)的残差结果可以看出,预报值和监测值的残差结果变化较大,残差绝对值在0~7 ns之间,预报结果的精度和稳定度较差,RMSE=2.728 0 ns。
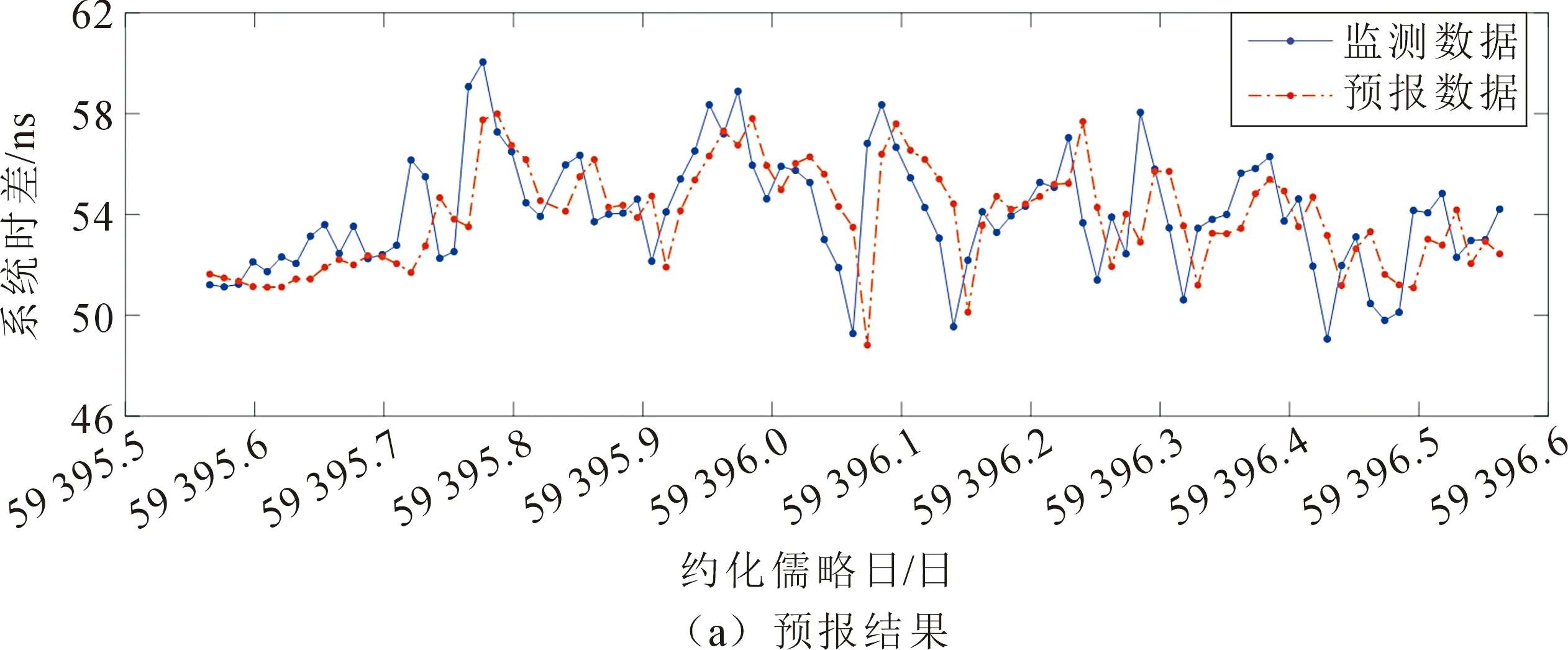
图15 PTB BDT-GPST的监测数据计算的监测结果和残差绝对值结果
图16(a)是根据PTB关于GST-GPST的监测数据的预报结果,蓝点代表监测数据,红点代表预报数据,预报曲线和监测曲线变化规律大致相合。图16(b)是残差结果,残差绝对值在0~1.4 ns之间,RMSE=0.740 3 ns。
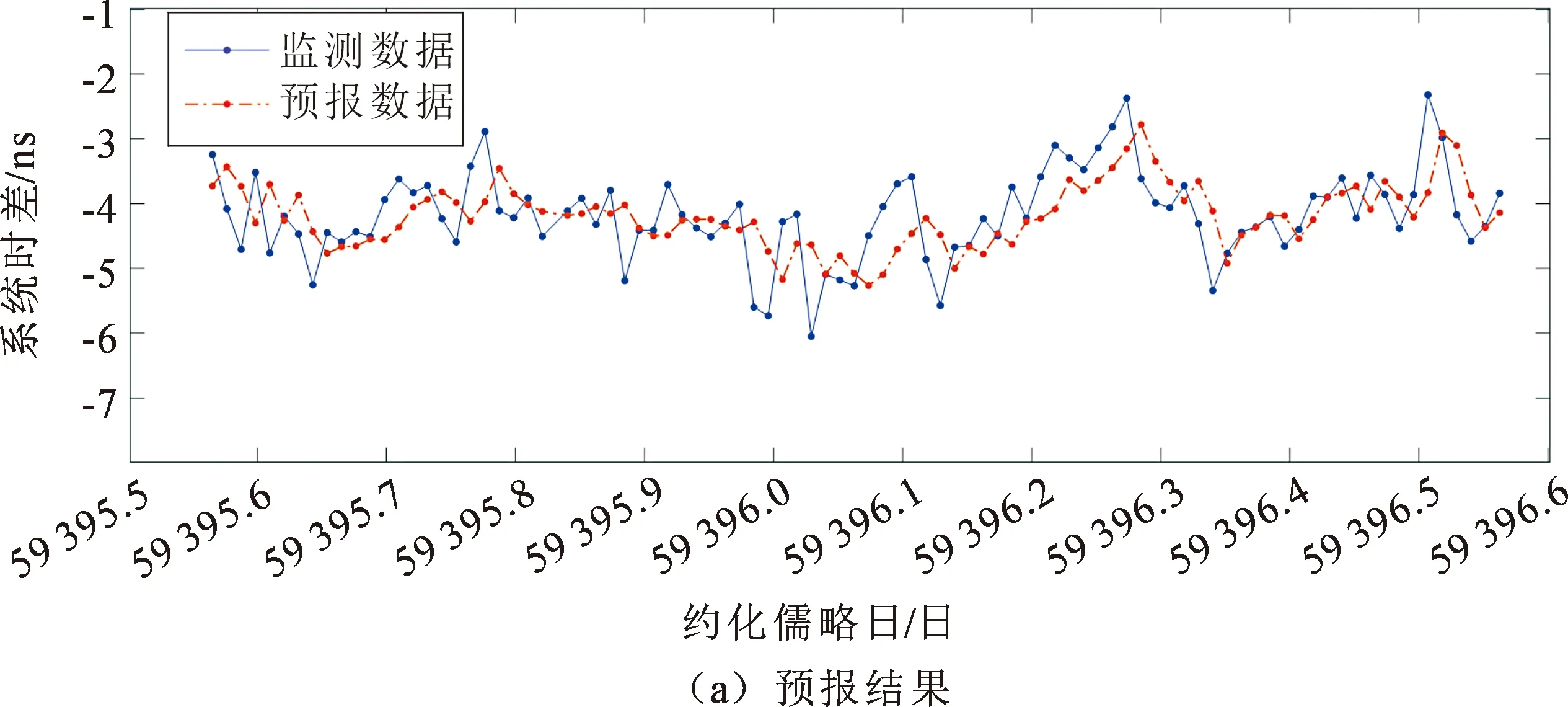
图16 PTB GST-GPST的监测数据的预报结果和残差绝对值结果
4 结论
本文对三个守时实验室的单站法GNSS时差监测数据以及时差预报结果进行了计算和分析,表明当使用单站法监测时,参考的UTC(k)的作为中间量被抵消,但是UTC(k)的噪声会被残留下来。另外,不同实验室使用的接收机不同,接收机的噪声也是影响时差监测结果的重要因素。各种不同噪声综合最终影响GNSS多系统互操作应用。从不同实验室监测结果以及预报结果的互相比对中,也可以反映出不同GNSS供应商保持系统时间和保持地面时的能力。从预报结果来看,利用同一种算法计算的不同实验室的预报残差有较大的差别,残差较大的实验室UTC(k)可能在对应时间段出现了波动或受到了较大的噪声干扰。由此,本文的研究结论可用于GNSS时差监测与预报的重要参考,同时也可用于本地UTC(k)保持情况监测。未来四个全球卫星导航系统之间的融合会越来越深入,进而对系统时间的偏差监测与预报精度需求会越来越高,因此在GNSS时差监测方法、时差预报方法、时差参数播发等方面还有很多技术需要深入研究。
猜你喜欢
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10
雷达与对抗(2021年4期)2021-03-18
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
铁道通信信号(2019年11期)2019-05-21
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
科技与创新(2017年1期)2017-02-16
百科探秘·航空航天(2016年9期)2016-12-01
中国资源综合利用(2016年11期)2016-01-22
振动工程学报(2015年1期)2015-03-01