网联环境下的燃料电池混合动力汽车能量管理
2023-01-21 01:36石泽华付主木陶发展司鹏举朱龙龙
河南科技大学学报(自然科学版) 2023年1期
石泽华,付主木,b,陶发展,b,司鹏举,b,朱龙龙,b
(河南科技大学 a.信息工程学院;b.河南省机器人与智能系统重点实验室,河南 洛阳 471023)
0 引言
近年来,随着汽车保有量的不断增加,城市交通拥挤、环境污染和能源消耗等问题日益凸显[1-3],燃料电池混合动力汽车(fuel cell hybrid electric vehicle,FCHEV)以其效率高、零排放等优点逐渐成为绿色交通系统的重要组成部分[4-5]。路况信息和信号灯状态对车辆的能耗影响较大,随着车与车(vehicle to vehicle,V2V)通信以及车与交通设施(vehicle to infrastructure,V2I)通信技术的发展,使得车辆行驶过程中获取前方信息成为可能。如果车辆能够合理利用车联网技术(V2V和V2I),则可避免红灯前频繁停车,降低能源消耗,保证车辆稳定行驶,提供经济安全的驾驶环境[6-8]。
文献[9]针对城市道路条件下的网联汽车,提出了一种分层控制结构,利用V2V通信获取邻近车辆的状态信息,为其提供最优的目标车速,并采用自适应等效消耗最小策略进行速度跟踪,但该策略获取的目标车速是匀速状态,不能反映实际道路交通情况。为了进一步优化城市交通环境下的目标车速问题,文献[10]提出了一种在车联网环境下利用链式神经网络进行速度预测的方法,并设计了一种新的等效因子适应规律,有效提高了目标车辆的燃油经济性。文献[11]提出一种双向长短期记忆序列模式的速度预测算法,并将均方根误差应用到模型预测控制中作为评价标准,验证了速度预测的准确性,但该算法设计忽略了车辆在交通路口处的延误,延长了通行时间。为了提高目标车辆快速通行交叉口的时间,文献[12]提出一种利用信号灯状态的经济驾驶系统,通过采用基于拉格朗日函数的模型预测控制(model predictive control, MPC)方法,有效减少了交叉口不必要的停车次数。文献[13]在实际交通信息构建的研究场景中,提出了一种利用粒子群优化算法求解非线性约束问题的速度优化策略,可有效缩短停车等待时间。为了进一步提高城市交通路口运行效率,文献[14]借助车联网技术建立了车辆通行的引导模型,利用多目标粒子群优化算法降低车辆交叉口通行时间。文献[15]提出了一种车速优化与交通信号控制的协同方法,同时优化车速轨迹和交通信号配时,最大幅度地提高了车辆的运输效率和燃油经济性。
以上优化策略多以降低燃油消耗为目的,应用于传统燃油汽车,未充分考虑绿色交通系统的发展,而且车辆运行过程中没有对全路段进行车速规划,导致通行交叉口时不能同时兼顾能源使用寿命和燃料经济性,造成信号灯处额外的停车等待时间。基于此,本文以燃料电池混合动力汽车为研究对象[16],通过利用车联网信息实时获取信号灯状态,结合目标车速设计一种分层能量管理策略,实现对FCHEV的实时优化,提高车辆燃料经济性和续航里程。基于MATLAB/Simulink-Advisor联合仿真环境和实验平台,对本文所提的分层能量管理策略进行仿真分析和实验验证。
1 基于交通信息的FCHEV能量分配原理
本文的研究对象是燃料电池混合动力汽车,其拓扑结构如图1所示。燃料电池作为主能量源对负载提供平滑的功率输出,并通过单向直流/直流(direct current/direct current, DC/DC)变换器连接到功率总线;而电池和超级电容作为辅助能量源,通过双向DC/DC变换器与功率总线相连,对负载提供功率缓冲的作用。FCHEV整车结构模型在MATLAB/Simulink-Advisor联合仿真环境下搭建,并选择合适的能量源参数以满足负载需求,具体如仿真部分介绍。

图1 FCHEV整车拓扑结构图
本文设计一种基于智能交通信息的分层能量管理策略,其原理如图2所示。上层控制策略中,利用V2V、V2I技术,建立交通信号灯正时模型,获取目标车辆的路况信息,采用模型预测控制算法得到车辆的最优目标车速,并将速度信息反馈给驾驶员。下层控制策略中,根据上层信号灯模型求解得到车速,进而可以实时获取汽车的需求功率,通过优化方法将其合理分配给3种能量源,避免红灯前的频繁停车,实现降低燃料消耗、提高能源经济性的目的。
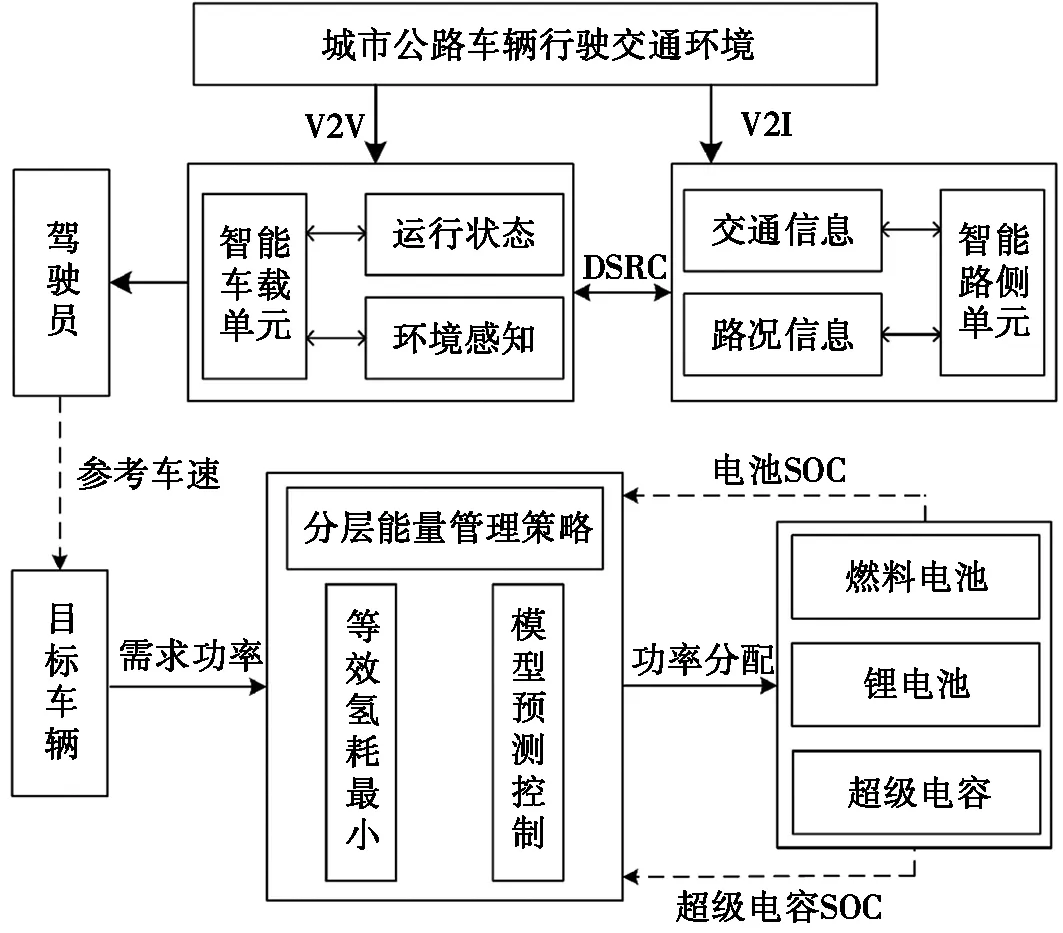
图2 分层能量管理策略原理图
2 分层能量管理策略设计
2.1 考虑交通信息的车速规划
为了便于分析实际交通路况信息,本文选取信号灯为红和绿两种状态,通过模拟真实道路情况,建立交通信号灯正时模型(即交通路口配备无线蓝牙传感器定位技术,能够同时采集到信号灯信号、相位、定时及探测器数据来量化交通路口的行程时间),合理规划出最优的目标车速。其目标车速的计算原理如下:
(Ⅰ)当下一个路口是绿灯时,驾驶员可根据车联网信息进行加速行驶,用以保证在绿灯变红之前顺利通过;或者通过降低车速,在不停车的情况下经过多次信号灯周期的循环,信号灯刚好由红转绿时顺利到达交通路口。
(Ⅱ)当下一个路口是红灯时,驾驶员可根据车联网信息进行合理选择加减速,用以保证达到交通路口时信号灯刚好由红变绿;或者经过多次信号灯周期循环之后,在绿灯结束之前顺利通过交通路口。
信号灯状态的判定如下[17]:
(1)
为了便于分析和更好地还原城市道路交通情况,目标车速的上下限为:
(2)
约束条件设置为:
(3)
其中:td为行驶时间,s;tr和tg分别为红绿灯时长,s;tc为信号灯周期,s;Cn为信号灯循环次数;dl为目标车辆与信号灯之间的距离,m;vobj为最优目标车速,m/s。
从实际角度出发,车辆满足正常交规行驶,且在城市道路中所允许的车速范围之内。通过模型预测控制算法实时优化每一时刻的车速,并不断反馈给驾驶员,使得车辆逐渐接近最优目标车速。目标函数设计如下:
(4)
式(4)化为状态空间表达式,利用MATLAB仿真软件中fmincon函数中序列二次规划求解器,对目标函数非线性规划问题进行求解,使得目标车辆行驶过程中尽可能跟踪目标车速,以避免红灯前频繁停车。
(5)
输入变量为车速和加速度所组成的矩阵,约束条件设置为:
(6)
式(4)~式(6)中:k为目标车辆的当前时刻;Np为模型预测控制算法的预测时域;u(t)为车辆加速度(即控制变量);vmin和vmax分别为交通道路条件下所限制的最小速度和最大速度;amin和amax分别为车辆最小加速度和最大加速度。
目标函数为了更好跟踪目标车速,选取2个权重因子[18],Q1优化的是行车过程中最优车速与基于信号灯状态获取的目标车速的差值,保证优化后的车速尽量跟踪到理想车速,从而减少车辆在城市交通行驶过程中红灯前停车等待;Q2优化的是车辆加速度,使得车速变化尽量缓慢,减少急加速和急减速,从而提高行车安全性和驾驶舒适性。
2.2 基于目标车速的能量管理策略
本文设计一种基于智能交通信息的分层能量管理策略,上层策略中通过利用车联网信息并结合模型预测控制算法实时优化目标车速;下层策略中通过将三能量源的能量管理问题转化为2个层面,采用自适应等效消耗最小策略和模型预测控制算法对每一部分进行分层管理,从而提高控制策略的效率。
首先,将车辆当前规划的目标速度信息作为整车模型的输入信号,结合车辆动力学参数求得每一时刻车辆的需求功率[19]:
(7)
其中:Preq为车辆的需求功率;m和v(t)分别为目标车辆的质量和速度;ηmotor为电动机效率;ρ和A分别为空气密度和迎风面积;CD和μ分别为空气阻力因数和滚动阻力因数;θ为道路坡度。
其次,在车辆行驶过程中,根据锂电池和超级电容的所有能量均来自于燃料电池,综合考虑提升燃料经济性和降低功率波动对锂电池使用寿命的影响,采用自适应等效消耗最小策略,建立基于锂电池和超级电容荷电状态(state of charge, SOC)值的惩罚函数,自适应优化其放电过程,实现对燃料电池功率的补偿。
(8)

同时,根据S0(辅助能量源的充放电效率)设计等效因子k1=S0(1+β+γ)的值,目标函数设计如下[20]:
(9)
其中:LHVH2为氢气的低热值;ηfc为燃料电池效率;α为单位时间内平均等效氢消耗与功率的比值,记为燃料电池等效氢耗转换系数。并将式(9)转化为一个线性规划问题,利用优化理论中约束最小化函数求出燃料电池最优输出功率。
然后,采用模型预测控制方法对锂电池和超级电容功率进行合理分配,以达到延长锂电池使用寿命的目的[21]。状态空间表达式设计如下:
x(k+1)=A·x(k)+Bu·T·u(k)+Bw·T·w(k),
(10)
其中:T为采样时间;A、Bu和Bw分别为状态矩阵、输入矩阵和扰动矩阵;w(k)为扰动矢量,指的是超级电容每一时刻输出的序列所组成的列向量。
锂电池和超级电容的SOC为输入变量,其离散状态空间表达式如下:
(11)
其中:Ebat和Esc分别为锂电池和超级电容的最大储存能量;Pess=Pbat+Psc为辅助能量源的输出功率。
最后,通过在可设定的预测时域Np内求解下一步的状态,使得状态变量的真实值以最快的速度接近参考值,并不断优化与真实值之间的偏差。
(12)
为了保证控制动作缓和,扩大寻优求解的范围,在目标函数中引入控制变量约束及松弛因子。
(13)
其中:Xk和W1分别为锂电池SOC的状态变量和权重矩阵;W2和W3分别为控制变量及松弛因子的权重系数。
约束条件为:
(14)
针对式(13)和式(14)中的目标函数及约束条件,利用二次规划算法进行求解,以维持锂电池SOC的稳定,从而更好地适应需求功率的变化,延长锂电池的使用寿命,提高续航里程。
3 仿真、试验及对比分析
3.1 仿真结果
本文控制策略在MATLAB/Simulink-Advisor联合仿真环境下设计,车辆仿真参数的设定:模拟城市道路通勤情况,由卫星地图可得某城区一段公交路线上信号灯个数及道路条件,假设目标车辆以20 km/h的初始速度顺利通过第1个交通路口,且满足城市道路交通规则,最高车速和最低车速分别为60 km/h和20 km/h,目标行驶距离为4 km;交通信号灯设置为8个,绿灯、红灯的持续时间分别为20 s和30 s,仿真迭代步长设置为0.1 s;锂电池和超级电容初始SOC均为0.7。FCHEV主要仿真参数见表1。
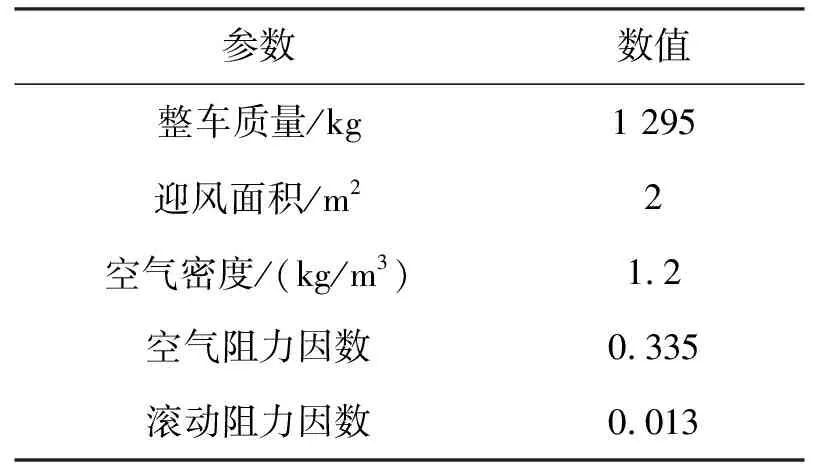
表1 FCHEV主要仿真参数
图3为城市交通路况下目标车辆模拟仿真分析结果,蓝色曲线为汽车的行驶轨迹。由图3可知:该曲线的斜率任意时间均不为0,表明车辆在每个红绿灯路口没有停车等待。因此,目标车辆能够通过车联网信息实时获取信号灯状态,避开红灯前的频繁停车,降低怠速次数。
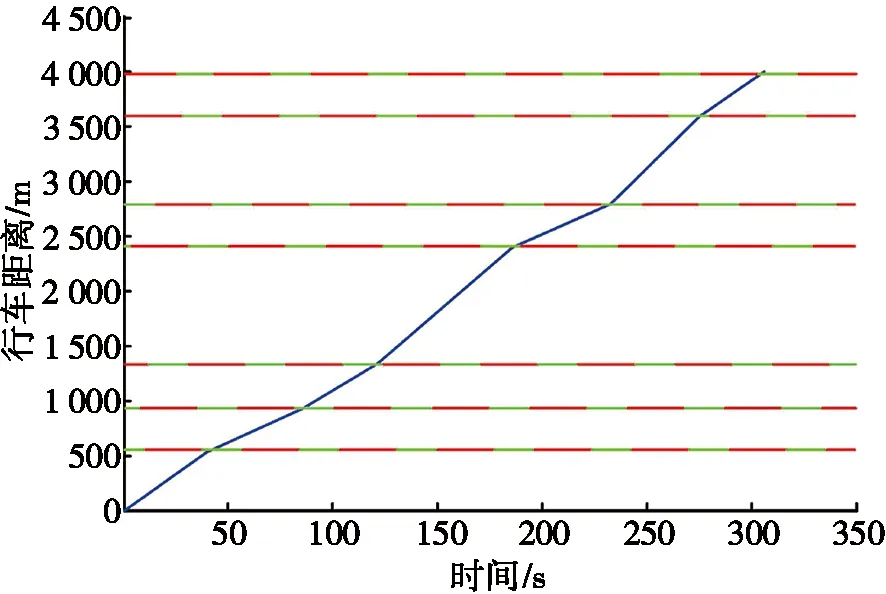
图3 目标车辆的车速轨迹曲线
图4为城市交通路况下目标车辆车速预测及速度跟踪结果,车辆行驶速度随着与交通路口之间的距离及信号灯相位实时变化,跟踪误差在每一时间段内合理变化,实际行驶车速跟踪效果理想,从而达到避免红灯前停车、降低能源消耗的目的。
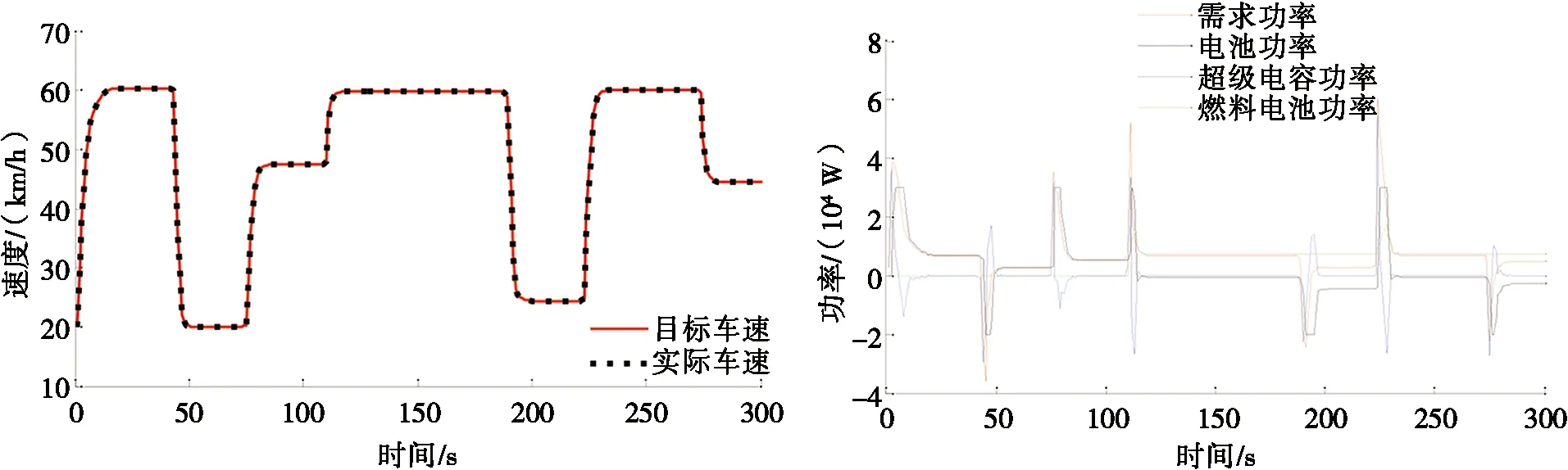
图4 目标车辆速度规划曲线 图5 三能量源功率分配曲线
图5是3种能量源在城市交通路况下的功率分配情况,本文设计的分层能量管理策略最大化利用每个能量源的优势,以提高汽车的动力性能。由图5可以看出:燃料电池的输出功率较为平缓,承担绝大部分的负载功率需求;在加速和减速阶段,超级电容优先承担峰值功率和吸收回馈制动能量,锂电池为超级电容提供功率补偿,保证燃料电池工作在高效区域,提高了燃料经济性,并延长了能源使用寿命。
3.2 试验验证
为了进一步验证所提策略的有效性,通过搭载燃料电池混合动力汽车测试平台进行实车试验,平台结构如图6所示。该平台主要包括由燃料电池、锂电池和超级电容组成的能量源系统,并基于传统汽车车身,配置车载动力系统、整车控制器、充电/逆变器以及DC/DC变换器系统,具体参数见表2。能量源系统通过控制器局域网络(controller area network, CAN)总线与控制平台建立通信连接,驾驶员通过模拟实车驾驶环境,在控制平台上利用油门和刹车踏板开合度进行信息传输(包括电压、电流、SOC、车速和需求功率等),用来调节DC/DC变换器的占空比,结合所设计的控制策略对3种能量源进行最优功率分配。

图6 FCHEV试验平台
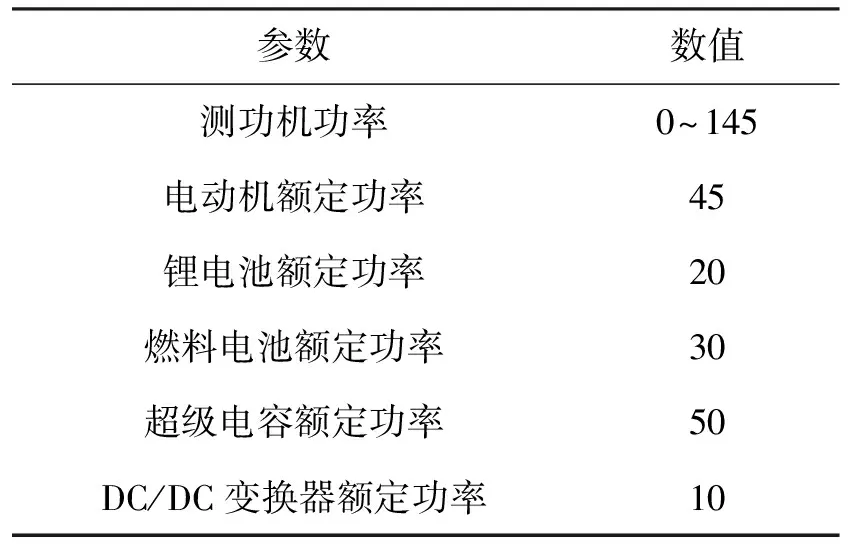
表2 试验平台主要参数 kW
为了便于分析问题,更加真实还原实际道路情况,人工模拟5次加减速驾驶通过交通路口(600 s)的情况,试验车辆的速度及负载需求功率如图7所示。根据参考目标车速,通过试验台架和制动踏板来模拟驾驶员的加减速操作,图7中负载需求功率出现“尖峰”现象,这是由DC/DC变换器的响应延迟所造成的,而速度曲线的噪声是手动操作所产生的误差。
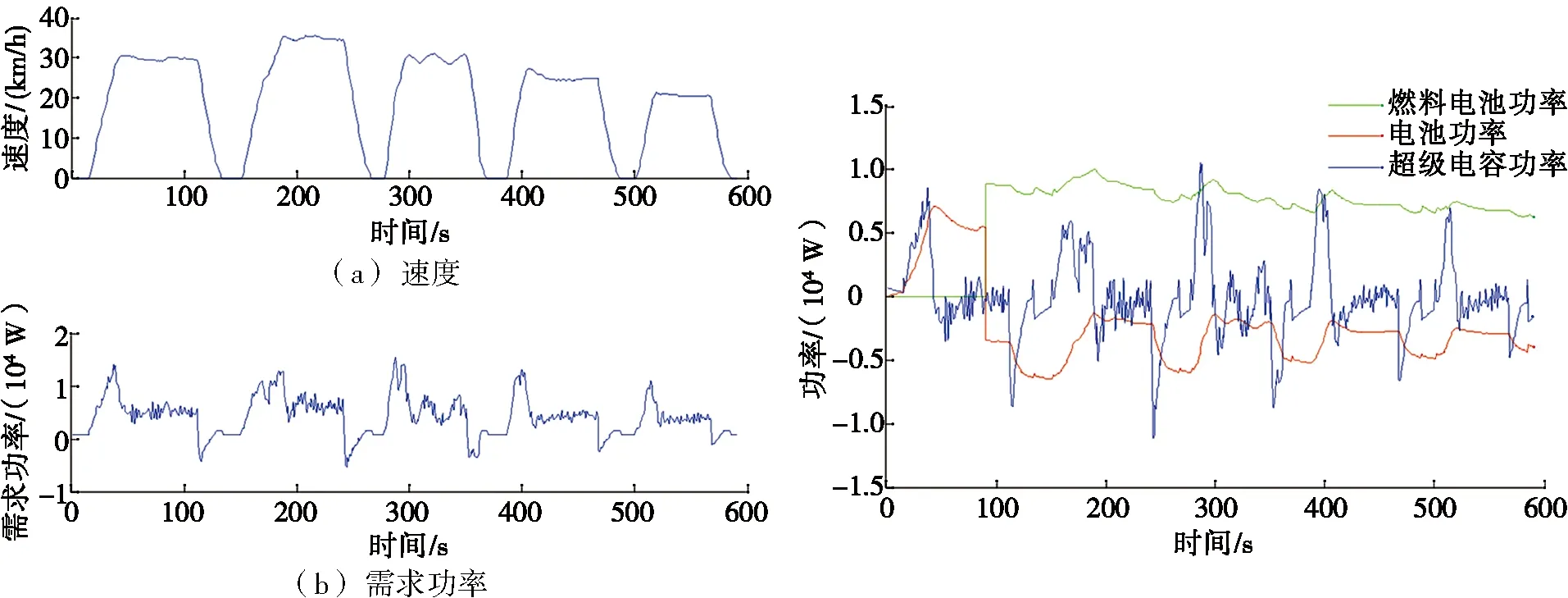
图7 速度功率曲线 图8 三能量源输出功率分配曲线
图8是试验过程中3种能量源的输出功率分配情况。由图8可以看出:在加速和减速阶段,超级电容承担较大的功率波动,而锂电池和燃料电池提供平缓的功率输出,并且两者输出功率均维持在10 kW内。然而,由于车辆在试验过程中受到指令下达延迟、信号采集和开发环境等因素的限制,导致能量源输出存在迟滞,锂电池功率波动相比于仿真结果更加剧烈,但是整体控制效果也达到了预期的设计要求。
3.3 对比分析
由试验结果可以看出,在控制策略的作用下,燃料电池、锂电池和超级电容的功率分配情况没有仿真结果“平滑”,试验中能量源输出功率出现“尖峰”现象,是由DC/DC变换器的超调和响应延迟所造成的。而且仿真结果是在离线状态下进行的,能量源转换效率按照理想状态进行,忽略了能量传递损失,导致等效氢耗的转换系数明显增大,出现锂电池波动剧烈的问题。然而,3种能量源的功率分配情况正如仿真结果所示那样,车辆加减速行驶过程中,超级电容首先响应负载需求,锂电池对其进行功率补偿,燃料电池功率缓慢上升至稳态,有效减缓了高频功率对能量源的冲击并保护其充电过程。虽然试验结果不如仿真结果理想,但整体上满足设计的预期要求,验证了所提出的控制策略对降低能源消耗和提高续航里程的有效性。
本文设计的基于智能交通信息的分层能量管理策略,通过利用车联网技术可以实时获取信号灯状态及车辆运行条件等信息,在城市交通环境下,通过指导经济车速规划促进车辆节能及环保驾驶,从而达到避免红灯前的频繁停车、延长能源使用寿命的目的。通过在城市工况下对目标车辆进行速度规划,相比于车辆自由驾驶状态能更好地适应城市交通环境,仿真策略对比如表3所示。由表3可知:所设计的分层能量管理策略对燃料经济性和续航里程分别提高了9.83%和5.13%。
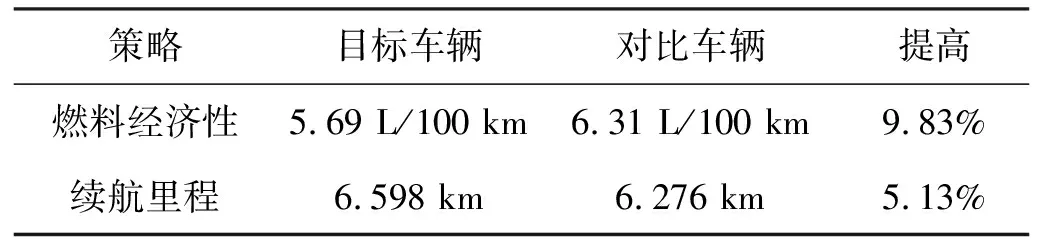
表3 仿真策略对比
4 结束语
本文设计了一种基于智能交通信息的FCHEV分层能量管理策略,上层模拟城市交通路况环境,基于车联网信息获取信号灯状态,对目标车辆进行速度规划,并利用模型预测控制方法对经济车速跟踪,以达到避免红灯前频繁停车的目的。下层利用规划的目标车速获取负载需求功率,采用自适应等效消耗最小策略和模型预测控制算法,对3种能量源输出功率进行最优分配,使得燃料经济性和续航里程分别提高了9.83%和5.13%,实现了FCHEV优良经济性能。
然而,设计上层目标车速时仅考虑到单一车辆的运行并且忽略了前后车安全跟车距离的情况,因此,复杂多变的交通环境下的能量管理策略将是下一步研究的重点。
猜你喜欢
小学科学(学生版)(2019年3期)2019-03-30
电子制作(2018年23期)2018-12-26
小天使·一年级语数英综合(2018年6期)2018-06-22
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
科技知识动漫(2017年4期)2017-04-15
华人时刊(2016年19期)2016-04-05
百科探秘·航空航天(2015年3期)2015-12-01
汽车维护与修理(2015年5期)2015-02-28
汽车电器(2014年8期)2014-02-28