
Improved High Order Model-Free Adaptive Iterative Learning Control with Disturbance Compensation and Enhanced Convergence
2023-01-22 09:00ZhiguoWangFangqingGaoandFeiLiu
Zhiguo Wang,Fangqing Gao and Fei Liu
Key Laboratory of Advanced Process Control for Light Industry(Ministry of Education),Institute of Automation,Jiangnan University,Wuxi,214122,China
ABSTRACT In this paper,an improved high-order model-free adaptive iterative control(IHOMFAILC)method for a class of nonlinear discrete-time systems is proposed based on the compact format dynamic linearization method.This method adds the differential of tracking error in the criteria function to compensate for the effect of the random disturbance.Meanwhile,a high-order estimation algorithm is used to estimate the value of pseudo partial derivative(PPD),that is,the current value of PPD is updated by that of previous iterations.Thus the rapid convergence of the maximum tracking error is not limited by the initial value of PPD.The convergence of the maximum tracking error is deduced in detail.This method can track the desired output with enhanced convergence and improved tracking performance.Two examples are used to verify the convergence and effectiveness of the proposed method.
KEYWORDS Pseudo partial derivative;enhanced convergence;tracking error;disturbance compensation
1 Introduction
Generally, there are two strategies for controller design.One is based on the exact process information,and the other is based on the input-output data which is a model-free controller design strategy.Many practical industrial processes contain nonlinearity, uncertainty, and time-varying characteristics.In this case,model-based control becomes inapplicable because it is difficult to obtain an accurate mathematical model of the controlled object.In recent years,the model-free methods have attracted the attention of many researchers because of their remarkable advantages and have achieved some valuable results[1,2].
Model-free adaptive control(MFAC)is one of the typical data-driven control methods proposed by Hou[3].The principle of the MFAC algorithm is to continuously generate a dynamic linearization model containing pseudo partial derivative(PPD),which transforms the nonlinear system into a timevarying linearized model that utilizes the input and output data of every step [4].Compared with the model-based algorithm,model-free adaptive control has the characteristics of fewer identification parameters and fewer calculations.This method has been applied in various fields,for example,process control[5],motor system[6],and so on.Arimoto et al.[7]proposed iterative learning control(ILC),which is suitable for a class of controlled objects with repetitive running characteristics,such as robots with reciprocating operation characteristics[8]and a chemical reactor in a batch process[9].Iterative learning control was applied to improve the tracking performance of nonlinear processes whose model and parameters are unknown[10].Zhao et al.[11]used iterative learning to design the unbiased finite impulse response.Combining the advantages of model-free adaptive control with iterative learning control, model-free adaptive iterative learning control (MFAILC) was proposed in [12].Unlike the iterative learning control with fixed learning gain, the learning gain of model-free adaptive iterative learning control is time-varying.It transforms the original nonlinear time-domain into a nonlinear iterative domain and can be applied to other nonlinear controlled objects whose structures and parameters are time-varying [13,14].Thus MFAILC algorithm has better stability and adaptability for complex systems[15].
Based on the previous research results, many researchers have further investigated the modelfree adaptive iterative learning control algorithm.In [16], an improved model-free adaptive iterative learning control method which based on an encoding and decoding quantization mechanism was proposed for a class of unknown nonlinear systems with data quantization.Li[17]adopted a neural network to optimize the control law and the penalty of PPD.For a class of nonlinear discrete systems with load disturbance and data loss, Hua et al.[18] proposed a control method with data compensation.Model-free adaptive iterative learning control was applied to a multi-agent system by Bu et al.[19].Chi et al.[20] proposed a high order model-free adaptive iterative learning control,which uses the input and output information of the previous iterations to construct a new control input.It is obvious from the above observations that MFAILC has made great progress in theoretical research.In the control process,convergence is a critical index for ILC so as to MFAILC[21].However,the convergence speed is related to the initial pseudo partial derivative, and it often takes several experiments to get the appropriate value of the initial PPD[22].The slower convergence will deteriorate the performance of the controlled process[23].
To obtain a faster convergence,the high-order algorithm was used to estimate the value of pseudo partial derivatives,which introduced more parameters to be adjusted unexpectedly[24].This method brings more difficulties in tuning parameters.On the basis of the former, this paper proposed an improved high-order model-free adaptive iterative control (IHOMFAILC).The main contributions of this paper are as follows:
· An improved PPD estimation algorithm, which takes the average value of the previous PPDs can achieve faster convergence without introducing more parameters.
·A differential module is introduced into the criteria function of the controller to compensate for the dynamic performance of the system under random disturbance.
· The proposed method contains fewer parameters to design and with the number of iterations increases,the maximum error gradually converges to zero.
The rest of this paper is organized as follows:Section 2 introduces the basic principle of modelfree adaptive iterative learning control.The proposed method with disturbance compensation and enhanced convergence is shown in detail in Section 3.In Section 4, the convergence and stability of the proposed algorithm are proved in detail.Two examples are used to illustrate the effectiveness of the method in Section 5 and the conclusions are drawn in Section 6.
2 Basic Principle of MFAILC
Consider the following nonlinear discrete-time SISO system:

whereuk(t)andyk(t)are thekth iteration input and output of system,respectively,nyandnuare the unknown orders of system,andf(·)is a nonlinear function.
The following two assumptions are given for system(1)to make the discussion rigorous:
Assumption 1:The partial derivative of the nonlinear functionf(·)with respect to its control inputuk(t)is continuous.
Assumption 2:System(1)satisfies the generalized Lipschitz condition,that is,for any timetand iterationk,if|Δuk(t)|≠0,then the system(1)satisfies the following conditions:

where Δyk(t+1) =yk(t+1)-yk-1(t+1),Δuk(t)=uk(t)-uk-1(t), andbis a positive constant.Based on the two assumptions,Lemma 1 can be achieved:
Lemma 1:For any nonlinear system that satisfies assumptions 1 and 2, if |Δuk(t)| ≠ 0, there must exist time-varying pseudo-partial derivativeφk(t),such that system(1)can be transformed into the following generic model:

whereφk(t)is bounded and satisfies|φk(t)|≤b.
In order to design the control law,the following criteria function is considered:

whereλis a weighting factor used to restrict the control input variation between adjacent iterations,andyr(t+1)is the desired output.
Substituting(3)into(4)and minimizing(4)with respect touk(t),we get the following control law:

whereρkis a step factor, andek-1(t+1) =yr(t+1) -yk-1(t+1) is the output tracking error.Sinceφk(t)is a time-varying parameter which is difficult to acquire its accurate values, it needs to be estimated based on input and output data.
As with solvinguk(t),the following criteria function is denoted:

whereμ >0 is a weighting factor,(t)is the estimation ofφk(t).
Taking the derivative of Eq.(4)with respect to(t)results in the following parameter estimation algorithm:

whereηk >0 is a step factor.
In order to make the algorithm estimate value of Eq.(7) more accurate, the following reset algorithm is denoted:if|(t)|<εor|Δuk(t)|≤εor

whereεis a small positive constant, and(t)is the initial value of iteration.The reset algorithm ensures the condition of Lemma 1 and the stronger tracking ability of Eq.(7) for time-varying parameters.
However,the rapidity of convergence of the maximum error of MFAILC is related to the value of the initial PPD.The larger the value is,the slower the convergence rate is and the larger the error is.Therefore,an improved method is proposed to solve the above problem.
3 Improved High-Order Model-Free Adaptive Iterative Learning Control Method
In the proposed method, a differential link is added to compensate for the impact of random disturbance on the system and only use input and output data to design the control law.
Consider the following criteria function:

whereγ≥0 is weighting factor limits the change of tracking error, and whenγ= 0 the criteria function is the same as Eq.(4).Substituting(3)into(9),we can get:

To get the optional solution, we minimizing (10) with respect touk(t)leads to following control law:

according to (11),φk(t)is an unknown time-varying parameter that needs to be estimated utilizing input and output data.
Unlike other high-order algorithms designed based on control input[25]and tracking error terms[26], the improved high-order algorithm uses previous iterations to estimate the PPD.Compared to the algorithm in[24],the improved algorithm does not need to take different weight coefficients for the previous PPDs.
If the number of iterations is less than the iteration learningn,the estimation algorithm of Eq.(7)is adopted:

when the number of iterations is larger than the iteration learningn,the following algorithm is adopted to reduce the dependence of the error convergence speed on the initial PPD value.Denote the following criteria function:

Taking the partial derivative of(t)in Eq.(13):

Minimizing Eq.(14)by solvingthe estimate algorithm is expressed:

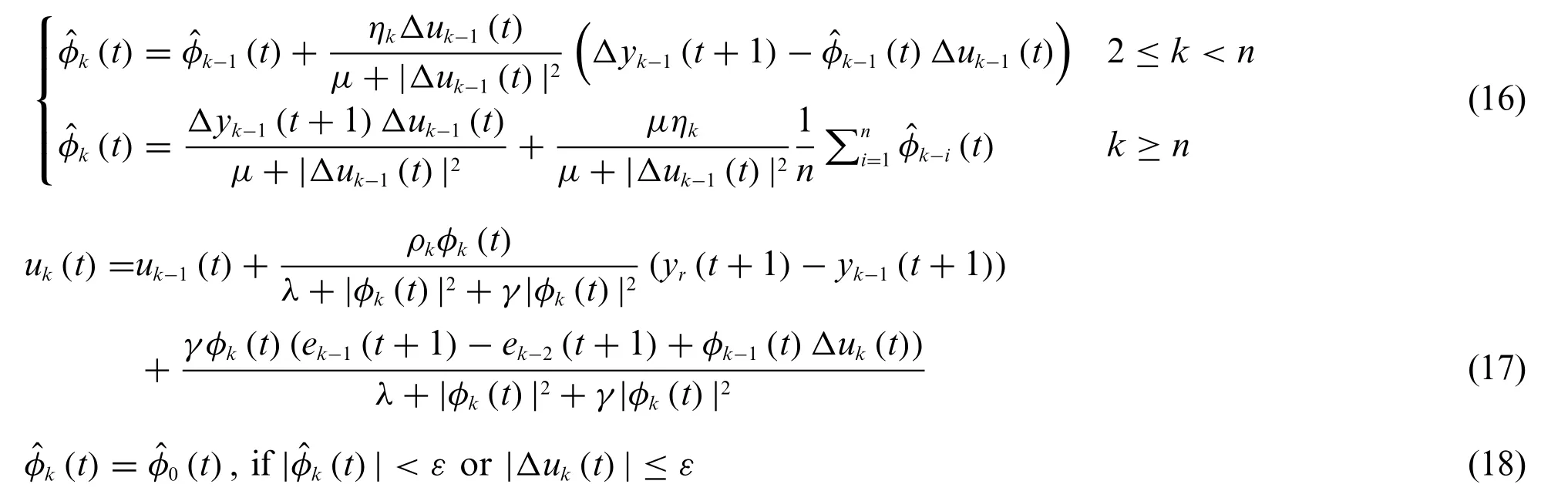
wherenis number of iterative learning.The reset algorithm of(t)is the same as Eq.(8).The improved algorithm uses the PPDs of previousniterations to estimate the current PPD.Thus the PPD can learn more from past data,making the tracking error has fast convergence.Therefore,the overall control scheme of IHOMFAILC consists of(16)–(18):
4 Convergence Analysis
In this section,the convergence of the proposed method is mainly proved.In order to make the following discussion more rigorous,the following assumption is given:
Assumption 3:For allk∈ {0,1,2,...,N-1} andt∈ {0,1,2,...,T-1}, if |Δuk(t)| ≠ 0,φk(t)>0.
Assumption 3 is similar to a restriction on the direction of control input gain.
Lemma 2:If system(1)satisfies assumption 1–3,there must existλmin>0 so that whenλ >λmin,the IHOMFAILC method has the following properties:
1.For allk∈{0,1,2,...,N-1}andt∈{0,1,2,...,T-1},(t)is bounded.
2.Whenk→∞,the system output tracking error converges to 0.
3.The close-loop system is BIBO stability, for allk∈{0,1,2,...,N-1} andt∈{0,1,2,...,T-1},uk(t)is bounded.
Proof:The first step is to prove that(t)is bounded.
In other cases,when 2 ≤k <n,denote the following estimation error of the PPD parameters:

Subtractingφk(t)from both sides of Eq.(12):

Denote Δφk(t)=φk(t)-φk-1(t),substituting(3)into(20),we have:

When 0<η≤1,μ >0,from Eq.(21)we can get:

From Lemma 1 we get|φk(t)|≤b,so|φk(t)-φk-1(t)|≤2b.Taking absolute worthwhile at both sides of Eq.(21):

whenn≤kand|uk(t)|>ε,we have:

Substituting Eq.(3)into(24)and taking absolute worthwhile at both sides,we have:

Eq.(25)can finally be simplified as follows:

From Lemma 1, we knowφk(t)is bounded and therefore |φk-n(t)| is bounded.Finally from Eq.(26),we can prove that(t)is bounded.
Then the convergence of tracking error and the bounded control input are proved as follows:
Denote ifk≤1,then|Δuk(t)| =0.Taking absolute worthwhile at both sides of Eq.(11):

Sinceφk(t)and(t)are bounded,whenλ >λmin>0,then there must existM1,M2,M3satisfy the following inequality:

From Eqs.(28)and(29)we get:

Sinceφk(t)and(t)are bounded,there existsd1that:

According to Eqs.(28)–(31),we have:

From Eq.(33)we can get,ifek(t)converges to 0,thenuk(t)is bounded.

Letd2=1-ρM2,substituting Eq.(33)into(34)we have:

Then Eq.(35)can be described as follows:

Letd3=ρM3, according to Eq.(29) we getM1φk(t)≤M3<0.5, soM1φi+1(t)≤M3<0.5.Eq.(36)can be transformed into:


whereg2(t+1) =d2|e1(t+1)|.According to (38), whenk→∞, ifgk(t+1)converges to 0 thenek(t+1)will converge to 0.Therefore,it is possible to prove the convergence ofgk(t+1)rather thanek(t+1)directly.

wherehk-1(t+1)=d3dk-11|e1(t+1)|+···+d3d21|ek-1(t+1)|+d3d1|gk-1(t+1)|.
According to Eq.(31):M2+M3<1,so we have:

Substituting Eq.(40)intohk-1(t+1),we get the following inequality:

Eq.(41)hk-1(t+1)can finally be expressed as:

Substituting(42)into(39)yields:

Whend2+d1<1,gk(t+1)converges gradually.Selectingρ∈(0,1),γ >0 to make:

Thus the following inequality is given:

Substitutingd2+d1<1 into Eq.(43),

According to inequality(38)and(46),with the increase of the number of iterationsk,gk(t+1)converge to 0 gradually,and thereforeek(t+1)will converge to 0 finally.
From inequality(33),we have:

Eq.(47)can be reorganized as follows:

This implies thatuk(t)is bounded.Lemma 2(1)–(3)are established.
5 Simulation
Example 1:Consider the following time-varying system[14]:

The desired output is:

whereα(t)=1+round(t/50)is a time-varying parameter of the system(49).For IHOMAFILC,the controller parameters are set as:λ=0.4,ρ=1,μ=1,η=0.5,γ=0.01 andε=10-5.The number of previous iterative learning is set asn=3.The initial value of PPD is set toφ0(t)=10.
Table 1 shows the ITAE performance index of the two methods.When the number of iterations is set to 10,20,30,and 40 while other parameters are unchanged,the IATE values of IHOMFAILC is less than that of MFAILC.As the number of iterations increase,the IATE values of both methods shows a downward trend.Therefore the proposed method performance index is better.
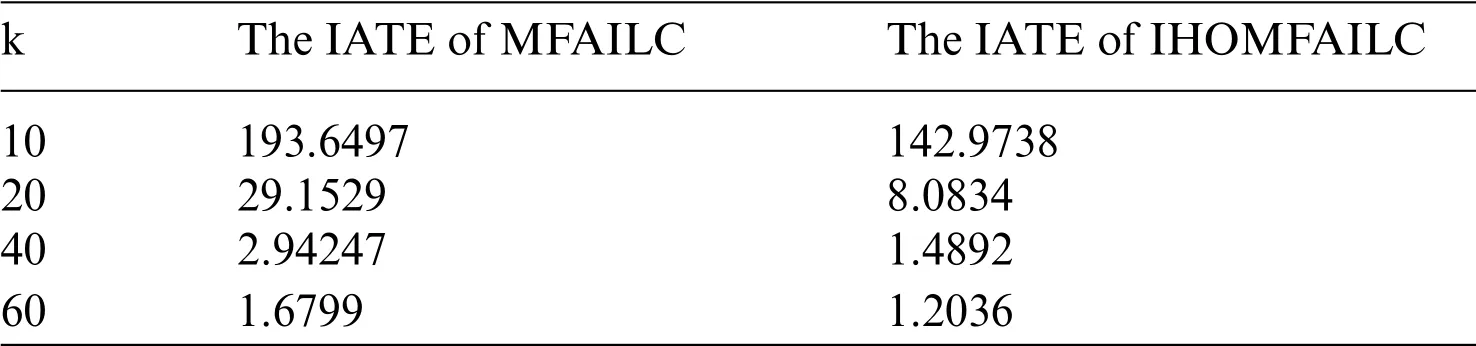
Table 1:The ITAE performance index of two methods with different iterations
Fig.1 shows the tracking results of IHOMFAILC and MFAILC with different iterations.From the 15th iteration result,the proposed method can gradually approach desired output ultimately tracks it at 40 iterations.The output of the MFAILC method at the 40th iteration still has a large error with the expected output.
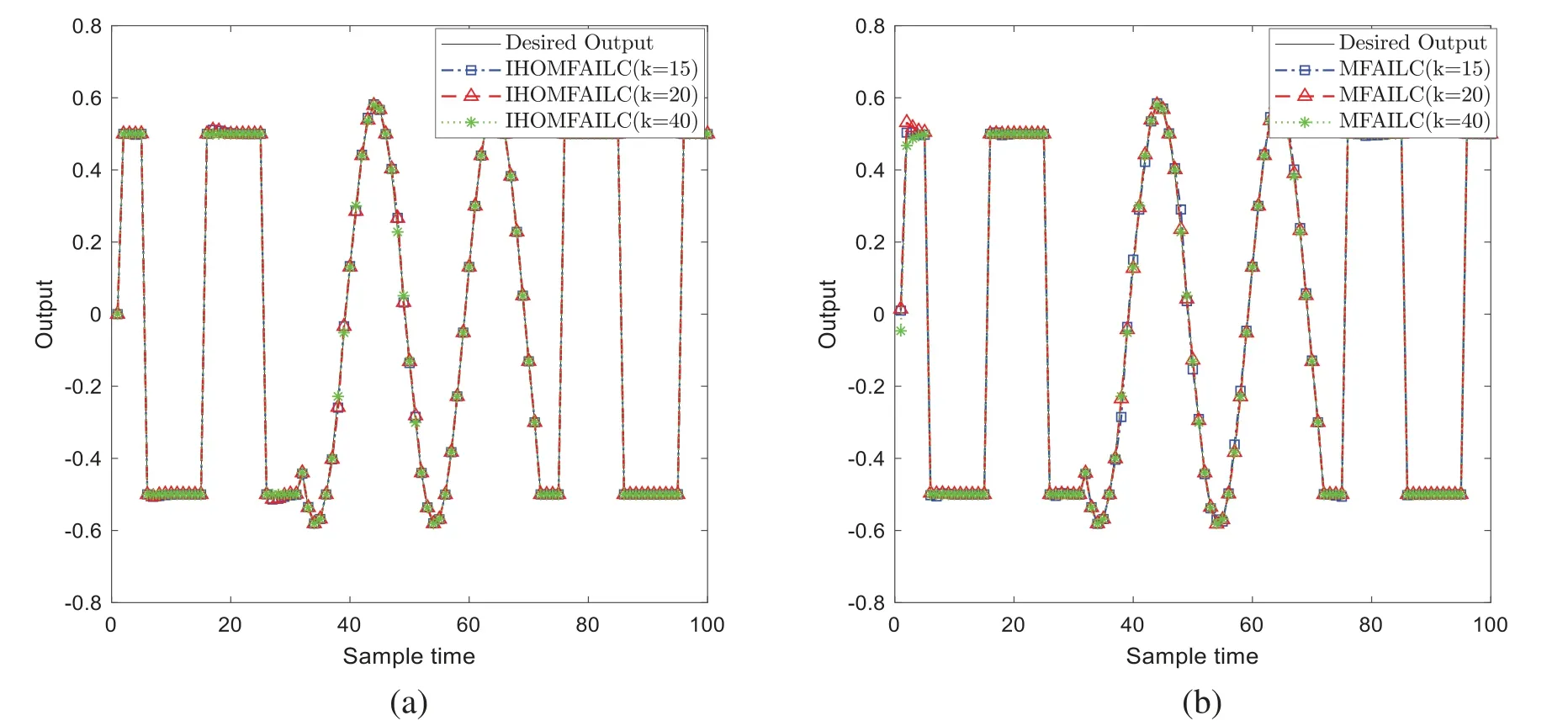
Figure 1:Tracking results of IHOMFAILC and MFAILC with different iterations
The maximum tracking error of IHOMFAILC and MFAILC with different initial PPDs is shown in Fig.2.As the picture shows,the change of the initial value of PPD has a great impact on the error convergence speed of MFAILC.The proposed method ensures fast convergence and the final error convergence to 0.Results demonstrate that IHOMFAILC can achieve fast convergence with a few attempts to select the best initial value of PPD.
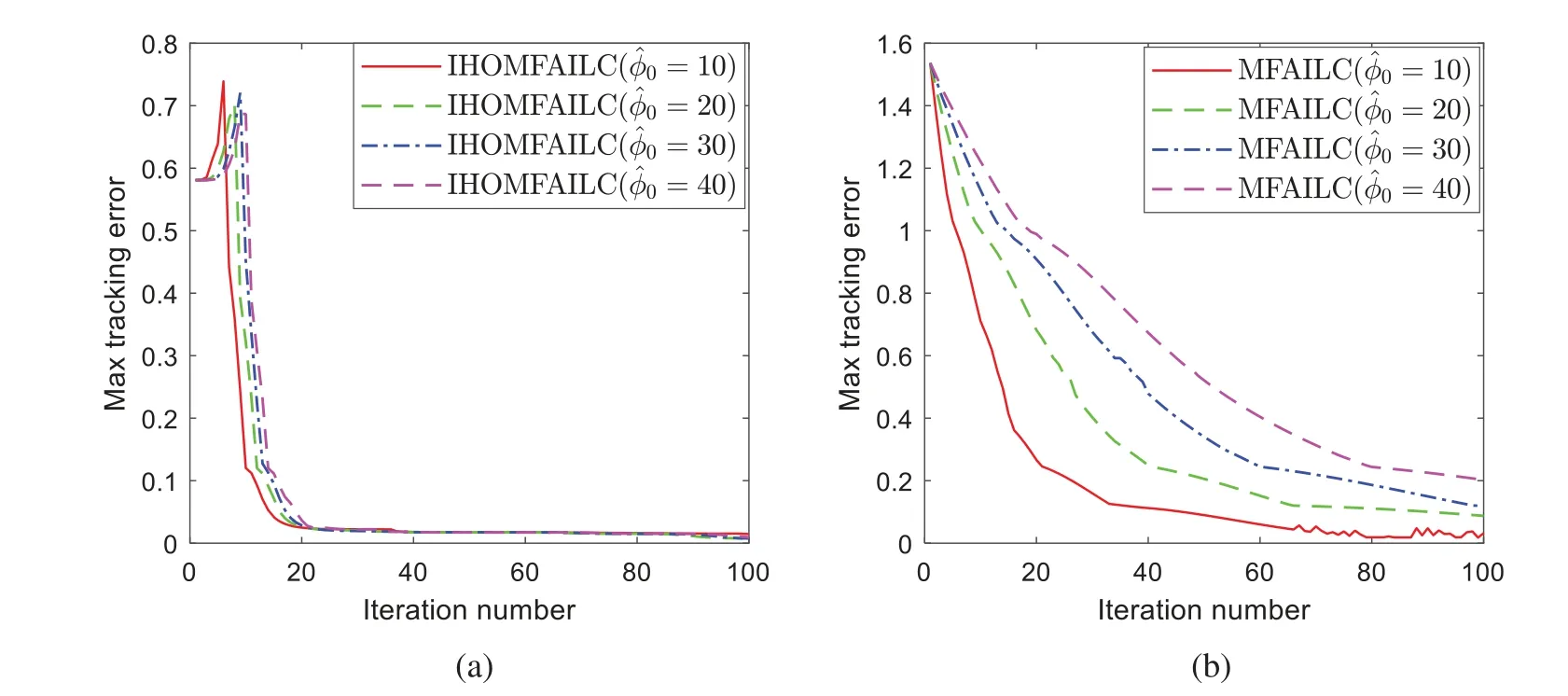
Figure 2:Comparison of max tracking error of MFAILC and IHOMFAILC with different initial PPDs
Example 2:In order to verify the effectiveness of the proposed algorithm,simulation is performed on a permanent magnet DC linear motor[1].The dynamic characteristics of the motor are described as follows:

wherex(t)is the position of linear motor(m),υ(t)is the speed(m/s),ffriction(t)is the friction force(N),fripple(t)is the ripple force(N),u(t)is the developed force(N),tis the continuous-time(s).
The mathematical model between friction force and ripple force is described as follows:

wherefcis the minimum value of coulomb friction andfsis the static friction,xδis the lubrication parameters andfυis the load parameters,δis an additional empirical parameter.m= 0.59,xδ= 0.1,δ=1,fc=10,fs=20,fυ=10,b1=8.5,ω0=314s-1.
Denotex1(t)=x(t),x2(t)=υ(t).Eq.(45)can be described as follows:

whered(t)is a zero-mean white noise with a variance 0.005.The desired output isyr(t)=10 sin(πt).Discretize(46)by Euler Formula and take sample time asts= 0.001.The controller parameters are set asλ= 0.06,ρ= 1,μ= 0.3,η= 1, andγ= 0.005.Fig.3 shows the maximum tracking error convergence of IHOMFAILC and MFAILC.It can be seen from the figure that the errors of the two methods are the same at the 11th and 14th iterations and the convergence errors of the IHOMFAILC in other iterations are all less than MFAILC.This simulation shows that the proposed method has fast error convergence even though the system exists interference.
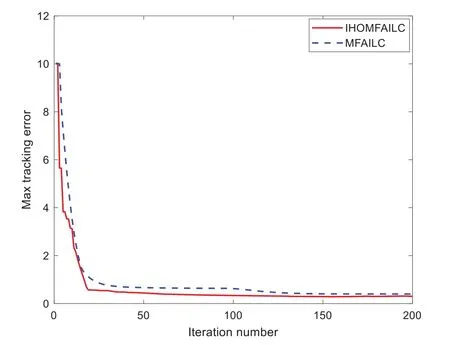
Figure 3:Max tracking error convergence of MFAILC and IHOMFAILC
6 Conclusion
Based on the model-free adaptive iterative learning control, a novel IHOMFAILC method has been proposed in this paper based on compact form dynamic linearization.When the system is disturbed,the proposed method can still keep track of the desired output.Furthermore,this method can achieve enhanced convergence without many experiments to find a suitable PPD value.Two examples show that the proposed method has good trajectory tracking and disturbance resistance.
Acknowledgement:This work was supported by the Natural Science Foundation of China, under Grant No.61773183.
Funding Statement:The authors received no specific funding for this study.
Conflicts of Interest:The authors declare that they have no conflicts of interest to report regarding the present study.
 Computer Modeling In Engineering&Sciences2023年1期
Computer Modeling In Engineering&Sciences2023年1期
- Computer Modeling In Engineering&Sciences的其它文章
- A Fixed-Point Iterative Method for Discrete Tomography Reconstruction Based on Intelligent Optimization
- A Novel SE-CNN Attention Architecture for sEMG-Based Hand Gesture Recognition
- Analytical Models of Concrete Fatigue:A State-of-the-Art Review
- A Review of the Current Task Offloading Algorithms,Strategies and Approach in Edge Computing Systems
- Machine Learning Techniques for Intrusion Detection Systems in SDN-Recent Advances,Challenges and Future Directions
- Cooperative Angles-Only Relative Navigation Algorithm for Multi-Spacecraft Formation in Close-Range