
基于5G技术的农业机械遥控系统设计
2023-01-22 13:31岳威
南方农机 2023年1期
岳 威
(辽宁建筑职业学院,辽宁 辽阳 111000)
现阶段,国内农业机械化生产工作依然需要借助人力,才能够对农业机械进行管理与控制,工作效率较低,造成了人力资源的浪费。而当前市场中农业机械遥控设备以航模控制系统为主,但该类型很难实现对农业机械的兼容与控制。基于此,本文针对现有的航模遥控系统,开发设计了一个基于5G技术的农业机械遥控系统。该系统通过利用5G通信模块能够实现远距离的数据传输和农机控制,且系统还具备易操作、安全性高等优点,可以有效满足农业作业的需要[1]。
1 农业机械遥控系统整体设计概述
基于5G技术设计开发的农业机械遥控系统主要由两个部分构成:遥控端和接收端。其中,本文选择利用STM32F030C6主控模块为系统的中央处理器。而5G通信模块的应用,实现了对数据的远距离通信传输,接收端主控模块则在PID算法的作用下,实现了对PWM输出信号的控制,具体农业机械遥控系统的总体结构设计如图1所示。
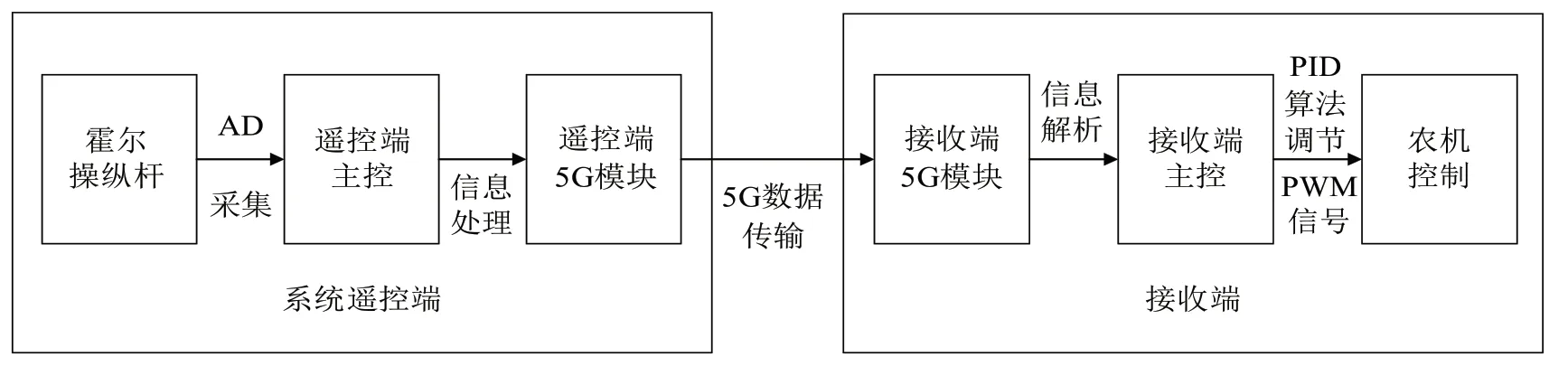
图1 基于5G技术的农业机械遥控系统总体结构设计示意图
2 基于5G技术的农业机械遥控系统软件设计与实现
2.1 系统软件总体设计
遥控系统软件总体设计由遥控端主控模块和接收端主控模块两个部分组成。其中,遥控端借助主控模块中的数字转换器(ADC)实现对霍尔操纵杆输出电压,对操纵杆的位置信息进行采集后,利用5G通信模块发送拨号上网AT指令,并和接收端的5G通信模块建立起通信。接收端在接收到遥控端所传输的信号数据之后,先根据传输的数据格式进行解压处理,然后利用脉冲宽度调制发生器生成相应的控制信号,以此实现对农业机械设备的运动控制[2]。
2.2 5G技术的通信软件设计
该软件的设计,主要是利用5G通信模块的拨号上网功能,实现了网络通信连接,当通信连接成功之后,可以借助5G网络数据实现对数据的访问。
2.3 信号数据整合及分析
针对操纵杆位置信息的确认,需要利用霍尔操纵杆的两路电压信号,通过内部的数字转换器将这两路的电压信号转为0~255数字量的两路位置信息之后,才能够帮助遥控端实现对操纵杆位置的标定。此外,数据的格式为“a和e分别为起始标识符和结束标识符,左右、前后等位置数据,并对数据进行了校验”。因此,位置信息可以根据每一包数据的格式进行位置信息打包并发送到接收端,以此完成位置信息的发送。
同时,在接收到对应的数据之后,需要对其起始标志位和结束标志位等进行数据检测和数据筛选。接着利用读取格式化的方式,实现对字符串中数据的提取。最后,结合校验位检测后的数据准确性,才能够有效确保所应用数据的有效性[3],并采用CPU内部的脉冲宽度调制生成相应的输出信号。
2.4 PID算法分析
若要进一步保障PWM输出信号的准确性,本文选择利用比例积分微分算法实现对输出控制信号的处理。同时,借助主控芯片内带的数字转换器实现对输出脉冲宽度调制的有效电压值进行测量,从而确认脉冲宽度调制的实际输出值。最后,根据PID算法对预设输出的PWM输出信号进行运算,本设计所采用的位置式PID算法为:

从式(1)来看,遥控系统的实际输出脉冲宽度调制信号和实际输出值两者之间的可控制偏差等分别由u(k)、e(k)来表示,给定预设输出的PWM则由e(i)来表示,而Kp、KI、KD等分别代表了控制器的比例系数、积分系数以及微分系数。
2.5 农机脱控检测设计
基于5G技术设计农业机械遥控系统时,为了有效防止和避免被遥控系统控制的农业机械设备在未收到对应的遥控信号时发生错误的运动动作,在系统设计过程中增加了一个定时脱控检测模块。该模块的设计,需要每隔10 ms,对系统是否接收到农业机械遥控系统的遥控端数据,进行定期检测。如果检测模块没有接收到遥控端的数据,这时该模块会强制性停止农业机械的PWM输出信号波形,以此控制并停止农业机械工作,有效避免农业机械设备在运行状态和脱控状态下发生安全事故[4]。
3 农机遥控系统硬件设计
3.1 遥控系统总体架构设计
首先,该农业机械遥控系统的硬件设计由5G通信模块、电源模块、霍尔操纵杆模块和主控模块四个部分组成。其次,接收端的硬件设计由5G通信模块、电源模块、主控模块以及信号输出端口模块等四个部分共同构成,并在霍尔操纵杆的控制作用下,能够对输出的脉冲宽度调制信号实施控制。
3.2 系统主要功能模块设计
3.2.1 5G通信模块设计
针对5G通信模块的设计,本文选择利用5G通信模块MW800实现数据通信,且该模块为多接口的工业级5G通信模块,拥有多个类型的硬件接口,为现有的设备升级提供了条件。这样一来不仅降低了研发的成本,还缩短了通信模块的研发周期。同时,该通信模块的设计拥有一路二线UART接口和一路四线UART接口。其中,二线UART接口实现了模块的调试,四线UART接口实现了和5G通信模块之间的通信,并可以完成相应的数据传输[5]。
3.2.2 霍尔操纵杆模块设计
1)霍尔操纵杆。遥控系统的操作杆模块设计,本文选择利用霍尔操纵杆传感器,该传感器具备较高的灵敏度,能够实现对位移幅度的检测,并从一定程度上降低由于操纵杆遥控的角度过大导致故障发生的概率。同时,当通电之后传感器的内部会出现磁场,操纵杆的位置变化时,传感器内部的磁场也会改变。并且,磁场的强度改变会由操纵杆内部输出的霍尔电压反映出来,并通过操纵杆摇动到不同的位置,改变输出电压的大小,使得CPU可以借助两路电压信号的大小实现对霍尔操纵杆的位置的判断。
2)滤波电路设计。该电路的设计,主要是由于霍尔操纵杆的输出电压信号一般在0 V~5 V,因此会受到干扰的影响,这时就需要借助滤波电路的设计,来阻抗匹配,通过过滤的方式消除干扰问题。
3.2.3 单片机主控模块设计
该模块的设计本文选择利用STM32F030C6芯片、5 V电源等实现该单片机主控模块的设计。不过为了进一步保障系统遥控端的电流能够正常供应,可以选择利用12 V的电池为电源,结合降压电路实现单片机主控模块的正常工作。同时,该主板模块具备异步收发传输器,可以处理5G模块所接收的数据信息,具备控制农业机械脉冲宽度调制信号的生产以及操纵杆位置数据的采集和算法处理等功能。在降压电路的设计上,本文选择利用LM2576降压芯片来实现,该芯片的最大输出电流为3 A,且拥有更加完善的保护电路。最后在降压电路的设计过程中通过增加一个二极管和电感还能够使得续流和储能效果得到提高,以此使其输出电能的连续性得到保证[6]。
3.2.4 光耦隔离模块设计
该模块的设计解决了单片机的I/O端口驱动能力弱以及负载电流过大的问题。同时,利用该模块还能够解决被控系统电流由于倒灌造成损坏的情况。
4 试验与结果分析
4.1 系统调试
基于5G技术的农业机械遥控系统设计完成之后,还需要对系统进行调试。因此,在系统调试过程当中需要将12 V电压经过降压模块降低到5 V。然后借助电压跟随器在滤波电路中实现干扰阻抗匹配以及稳定电压。并通过对电压跟随器的输入电压进行改变,将其和输出电压进行测量对比,就可以得到相应的测试数据。而降压模块电路的应用,可以为农业机械遥控系统提供更加稳定的电压[7]。
4.2 农机试验
4.2.1 5G通信模块试验
为了进一步对本文设计的遥控系统的可行性与实用性进行验证,将该遥控系统安装在平台车上,利用驱动器实现对车辆的控制试验。从5G通信模块测试方面来看,借助AT指令的5G通信模块,能够和5G网络通信构建相应的连接,然后利用回复指令对是否通信连接成功进行判断[8]。当系统的四线UART接口实施的数据发送和接收显示正常时,则代表能够实现5G通信。
4.2.2 霍尔操纵杆试验
针对霍尔操纵杆的试验分析,在对车辆进行遥控操控时,通过操作操纵杆进行前后、左后的轴位置转换为两路电压信号。实际所采集到的信号变化和其理论相同。并且两路信号和操纵杆的移动角度两者之间呈现正比关系,也就是信号电压大小会随着操纵杆的角度转向变大而变大[9]。
4.2.3 农业机械遥控行驶试验
从农业机械车辆控制行驶方面的测试来看,将本文设计的遥控系统安装在平台车上,可以借助遥控端实现对遥控系统的测试。因此,当操纵杆处于停止工作状态,也就是中间位置时,则被测试的车辆处于静止状态[10]。当操作操纵杆进行前(后)、左(右)等轴向操作时,车辆会呈现出前进或后退的运动,并且随着操纵杆的推动位移增加,其速度也会得到增加。当操作操纵杆向前(后)操作,并向左(右)操作操纵杆时,被测试的车辆会呈现出前进或者后退的运动且同时会向左或者向右转弯。最后经过行驶测试证明了基于5G技术设计的农业机械遥控系统的可行性。
5 结语
本文基于5G技术研发的农业机械遥控系统,在脉冲宽度调制(pulse width modulation, PWM)信号和5G通信的共同作用下,利用霍尔操纵杆可以实现对大部分的农业机械系统的运动进行控制。并且,在比例积分微分算法的控制下,即使农业机械遥控系统发生控制信号终端或者农业机械设备运动超出使用范围等问题,系统也会自动实施紧急停止功能,以此有效避免发生安全事故。仿真结果表明,该农机遥控系统具备易操作、安全性高等优点,可以有效满足农业作业的需要[1]。
猜你喜欢
工业设计(2022年9期)2022-10-13
房地产导刊(2021年12期)2021-12-31
小学生优秀作文(低年级)(2021年11期)2021-12-06
军民两用技术与产品(2021年7期)2021-10-13
儿童文学选刊(2019年2期)2019-09-10
语文世界(小学版)(2019年2期)2019-02-24
农机使用与维修(2018年5期)2018-07-05
山东工业技术(2016年15期)2016-12-01
中小企业管理与科技·下旬刊(2016年4期)2016-11-19
太空探索(2015年6期)2015-07-12
