
超声波测深系统的应用研究
2023-01-22 04:42张劲军唐开胜朱增伟张佳慧
科海故事博览 2023年1期
张劲军,唐开胜,廖 月,朱增伟,张佳慧
(1.江苏省灌溉动力管理一处,江苏 泰州 225300;2.泰兴市马甸水利枢纽服务中心,江苏 泰兴 225400;3.江苏省泰州引江河管理处,江苏 泰州 225321)
水运产业的飞速发展,在直接繁荣水上交通和经济的同时,也给船舶搁浅、船舶碰撞等水上交通安全事故发生可能性的增大带来了较大隐患。吃水深度作为船舶运输过程中的重要参数,能够通过检测管理有效规避船舶在水深较小河段运行的安全故障,避免阻碍水上交通。但传统模式下的吃水深度检测方法较为笨重,测量精度差距较大,直接降低了管理人员或者管理部门对水上交通的治理效率,因此,研究新型船舶吃水深度检测系统的必要性显著增强。本文以超声波测深为基本原理,构建船舶运行过程中的超声波测深系统也就具备重要理论意义和现实价值。
1 超声波测深原理
在物理学研究过程中,声波作为发生物体在气体、固体甚至是液体等不同介质中振动频率的传播,能够通过声波在介质中传播方向和振动方向一致性探究声波检测过程,从而利用超声波检测船舶吃水深度参数值的大小。以声波方向性为例进行分析可知,由于声波作为声源通过介质向周围传播重要信息,其传播特性直接决取决于声源振动频率的大小以及所发出波长的长短,当声波的波长大于其声源的大小参数时,将会呈现均匀状态向周围范围内传递,而当波长处于较短范围时,主要能量将会在声波前方较小范围内的扇形区域内传播,具备更强的方向性,因此,能够通过对声波在传播过程中相同位置点所构成面的不同,将其分为不同的波形,从而利用波形分析声源的具体情况,在此基础上探究声音传播运行过程中具体船舶的吃水深度大小,图1 即为球面波波形适应结构图。
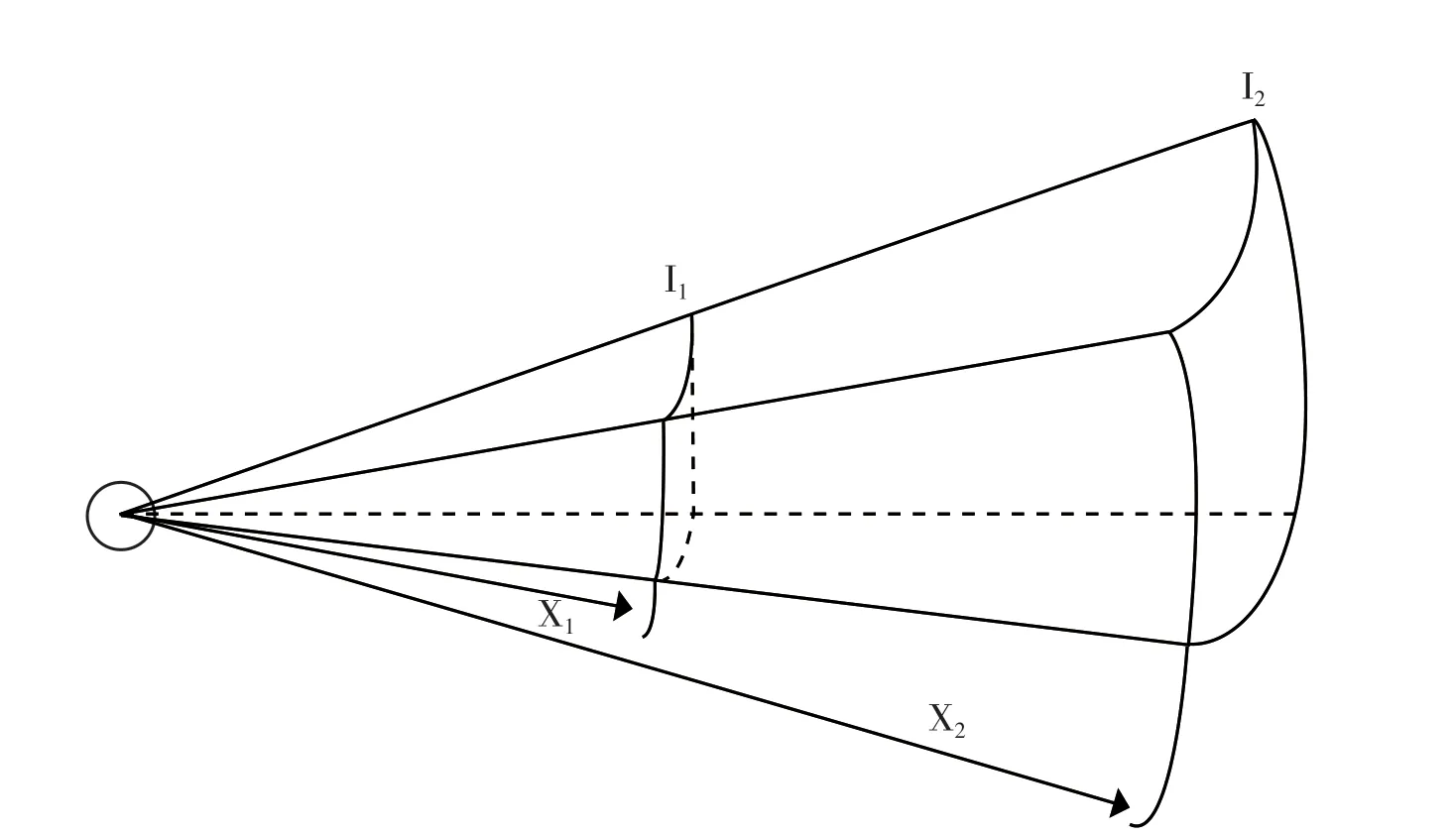
图1 球面波波形适应结构图
2 超声波测深系统实现方案
考虑到水运产业快速发展下船舶吃水深度检测的重要性,本文结合某工程下游航道及其下闸门的具体运行情况,研制了基于超声波的吃水检测系统,利用了超声波所携带的数据信息这一技术,能够在不影响船舶运行通行速度甚至是通行时间的前提条件下,对船舶的吃水深度进行全天候不间断的实时检测。船舶信息处理过程中的吃水深度检测系统、船舶数据信息采集系统以及船舶航行速度检测系统和船舶检测显示系统等能够组成其综合管理平台,其中,船舶吃水检测系统通过arm 和fpga 进行协同工作,进而通过对超声波传感器接收到的检测数据信息的分析,探究船舶运行过程中的水位数据参数,从而通过检测其支架的数据信息,得到船舶运行过程中不同点位甚至是不同运输条件、不同速度下的吃水深度参数值大小,通过无线通信技术将船舶的具体深度数值信息向软件系统进行传递,从而使船舶数据信息采集系统能够通过船舶自动识别系统加强对其传船舶航行过程中基础数据信息的接收和控制,并将该基础数据信息传递到船舶信息管理综合平台,而综合管理平台又能够进一步借助船舶速度检测信息系统在多普勒效应的基础支撑条件下,实现对其高精度和低速雷达等的有效利用,进而对船舶航行的速度进行检测,将检测结果返回到信息综合管理平台进行强化,对比得到不同区域范围内船舶具体吃水参数值大小。
基于超声波的测深系统的实现过程,主要包括了基于超声波的测深系统的下位机设计和基于超声波的测深系统的上位机开发设计两大部分,其中,就基于超声波的吃水深度检测系统下位机设计而言,由于下位机在运行过程中需要结合超声波传递过程中的方向特质、衰减特质甚至其衍射效应等,充分利用原理后进行其下位机硬件结构的设计,充分调整结构电路,实现基于超声波的船舶航行系统的测深,在此过程中采用了arm 和fpga 的双核架构模式。能够充分发挥其基本优势,arm 作为主控制器,能够加强对基于超声波的测深系统的整体控制,确保其检测数据的高效融合。和上位机系进行无线连接通信的fpga作为辅助控制器,能通过测试系统输入输出端口优势,实现对高速信号的采集和存储。在船舶航行过程中超声波传感器将其放置于发射和接受检测下方后,检测支架能够通过其附体浮力漂浮于水中,从而借助水位计和倾角的传感器,在发射既定信号后对船舶吃水深度进行检测,发射端能够通过电路的调节作用,和超声波同步数据信号相结合[1],当船舶航行数据信息模块能够接收到上位机控制信号数据后,基于fpga 的数据信息采集模块和水位计采集模块开始工作,在接到数据指令通过对接收端的调制甚至是放大之后,实现信号参数的模拟转化,对采集到的数据信号进行高效率识别,当探测到超声波同步信号后,能够通过固定延时作用强化对超声波检测数据的转换,并将转换得到的数据信息发送到模块,使水位计模块能够在接收到既定的工作指令后,按照固定的检测效率向arm 模块发送实时的船舶吃水水位数据信息。
基于超声波的船舶吃水深度检测过程中,其上位机的结构设计主要是对检测系统下位机所接收到的数据信息进行处理,得到数据预处理后的融合分析和解析,对其检测数据进行优化处理之后得到参数信息,实现对船舶运行过程中吃水深度检测,主要包括了数据提取和分析、超声波检测数据的浮动分析等诸多内容。以超声波检测数据的浮动分析为例进行研究可知,基于超声波的船舶吃水深度检测系统,检测装置主要漂浮于水面,在水面出现波动状况时,其检测系统接收数据一端将在水中进行浮动,进而对水面的检测系统的检测精确度和可信性造成一定不良影响,因此,基于超声波的浮动检测,必须对该类问题做出一定的优化,以确保最终检测得到的数据参数符合精确度要求。通过对水位计模块以及传感器模块进行优化设计后,在上位机软件结构系统和下位机的数据信息提取分析之后,能够将接收到的水位及参数信息等融合[2],在超声波检测数据浮动分析的条件下得到较为精确的参数值。通过对船舶实际运行参数的观测及船舶吃水深度的检测,超声波系统所发生的浮动为不规则浮动且并无规律可循,因此,需要对其超声波检测过程中的浮动摇摆情况进行高效率分析,按照超声波检测中重心在其三维空间内的位置变化情况进行分类处理。
3 超声波测深系统的应用
为了进一步探究本文所提出的基于超声波船舶吃水深度检测方案的应用有效性,文章对其进行了实验模拟探测。整个模拟实验室通过实验室中水池的墙壁和水池内的水进行航道的模拟,借助具有吸波材料的浮体来模拟船舶的通行过程,借助其材料对超声波的吸收和减弱作用来模拟传播通信过程中,在钢板作用条件下对水下超声波的遮挡作用。在对系统进行设置过程中,主要采取浮桶和遮挡板以及支架组成的方式,保持船舶运行的整体稳定性,完成多次实验过程。在对六个不同的遮挡深度进行统一条件下的充分检测之后,判别船舶运行过程中吃水检测深度的系统运行的稳定性和可靠性,当其检测深度为107cm、112cm、117cm、122cm、127cm、132cm 时,得到的模拟航宽度为30m,检测数据如表1 所示。由表可知,在不同的模拟遮挡深度条件下,基于超声波的船舶吃水深度检测效果的最终稳定性较好,实验误差在可接受范围内,也就是说,基于超声波的船舶吃水深度的检测系统,能够有效达成对船舶运行过程中吃水深度的全过程监管和高效率的数据提取,从而为船舶运行过程中的各项决策提供数据支撑。
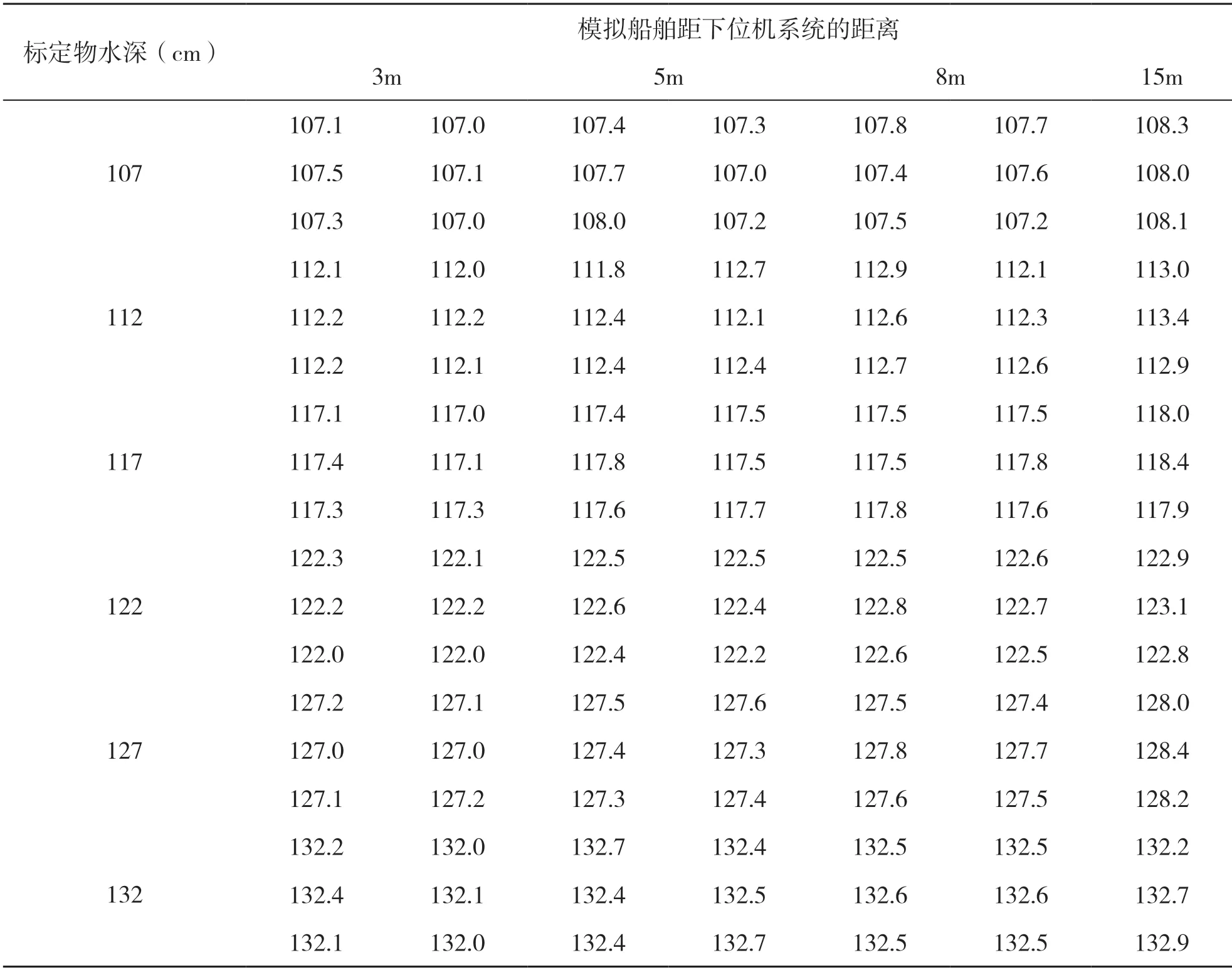
表1 检测数据表
4 结论
本文从水运产业飞速发展背景下船舶吃水深度检测重要性出发,提出以超声波技术支撑船舶测深,在分析超声波测深原理的基础上,详细研究了超声波测深系统实现方案,对其中的系统方案设计、功能、运行过程等进行了详细的分析,最后探究了超声波测深系统在船舶运输产业中的具体实践和应用,能够有效改变传统模式下船舶吃水深度检测方法最终结果精确度不足和受外界环境影响较大的弊端,为我国水运产业技术优化奠定了扎实的基础。
猜你喜欢
船舶(2021年4期)2021-09-07
中学生数理化·七年级数学人教版(2020年11期)2020-12-14
小哥白尼(趣味科学)(2019年10期)2020-01-18
船舶标准化工程师(2019年4期)2019-07-24
艺术品鉴证.中国艺术金融(2018年8期)2019-01-14
艺术品鉴证.中国艺术金融(2018年10期)2019-01-08
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26
中国船检(2017年3期)2017-05-18
