基于自适应遗传算法的某款纯电动汽车智能发电策略分析
2023-02-07 12:04余东
汽车实用技术 2023年2期
余 东
(成都工业职业技术学院 智能制造与汽车学院,四川 成都 610000)
无论是车辆在行驶过程中受到的空气阻力,还是在减速或制动过程中受到的摩擦阻力,都会造成汽车通过摩擦生热的方式消耗大量动能,导致汽车能源利用率低下,续航里程不足等问题。新能源汽车中的纯电动汽车广泛应用大功率动力电池,其整车性价比和动力电池尺寸决定了电动汽车的商业化进程,而纯电动汽车智能发电对于整车性价比和动力电池尺寸具有关键影响。具有可控预算和车辆空间要求的购车人士将纯电动汽车较短的续航里程作为主要不满对象,最终选择传统能源汽车,使得纯电动汽车市场竞争力不足。
叶青通过研究纯电动汽车的安全制动范围以及影响回馈制动能量的约束因素,在Matlab中搭建纯电动汽车机电复合制动力分配仿真模型,以最大化回馈制动分配比例为目标函数,以车速、制动强度和动力电池荷电状态(State Of Charge,SOC)值作为输入、以回馈制动分配比例模糊控制器隶属函数和规则表为输出,建立了回馈制动能量模型,通过遗传算法优化,最后仿真得到回馈制动力及可回收制动能量有了明显的提升[1]。李春雷以四轮毂电机独立驱动纯电动汽车为对象,研究四轮毂电机独立驱动纯电动汽车的动力系统参数、四轮毂电机制动能量回馈发电效率模型、轮毂电机制动能量回馈的影响因素以及四轮毂电机独立驱动纯电动汽车制动能量回馈策略[2]。朱波等通过分析发现制动加速度与制动踏板开度成正比变化,为了改善制动效能的一致性,引入制动踏板开度修止系数,制定了基于PRBS-BEC策略能量回收策略,结果表明,能量回收效率有所提高,且制动效能更接近传统汽车[3]。张鹏以微型乘用车为研究对象,对纯电动汽车的能耗影响因素、动力系统参数匹配方法、电驱系统参数优化、能耗优化方案等进行深入的研究和分析,在兼顾动力性的前提下,可以提升经济性,同时使用遗传算法,在工程软件平台上,建立多目标优化模型,实现电机和减速参数的优化匹配方法[4]。郑伟提出在新能源电动汽车前端进气格栅后安装一台功率为50 W的磁悬浮垂直轴风力发电机,然后通过对气流动能、风压、风速等研究,得出风能以风速的三次方倍增加,风压力以风速的二次方倍增加。风力发电机发电效率不仅受到风能利用系数制约,还与机械传动效率等因素有关[5]。
国内专家学者针对纯电动汽车续航能力的提升从制动能量回馈、搭载随车风力发电等途径进行了相关的研究。若单方面从制动能量回馈研究续航里程,分析了制动能量回馈影响因素如车速、制动强度及动力电池SOC值,而制动能量回馈则需要车辆制动时才能产生电能,发电条件单一。若从随车风力发电研究续航里程,则需要车辆有一定的风速、风压,才能发出所需要的电能,发电要求复杂。从制动能量回馈和风力发电协同工作发电,可克服发电条件单一等问题,只要车速到达发电条件就能启动风力发电,只要踩下制动踏板就能制动回馈,发电形式多样,动力电池成本占整车成本二分之一以上,在电池容量不增加的前提下,通过制动能量回馈和风力发电来提升续航里程是降低整车成本有效途径之一。对于汽车制动回馈模糊控制研究,可通过遗传算法优化能量回收影响因素,提升整车回收能量。
1 纯电动汽车风力发电与制动能量回馈影响因素
纯电动汽车是由可充电电池(如:铅酸电池、镍镉电池、镍氢电池或锂离子电池)提供动力源的汽车[6]。因此,纯电动汽车续航里程主要由动力电池供电量决定,而动力电池供电量可通过行车过程动态补充。现有部分车辆配置制动能量回馈功能,但能量回收量不足以显著提高车辆续航里程。当前城市内道路路况良好,城市间以高速或快速路连接,为增加纯电动汽车单次充电后行驶公里数,结合市内、市间综合特点和汽车技术应用现状,以车载风力发电和制动能量回馈来为纯电动汽车增程。
风力发电是指将风的动能通过风能转换为机械能,再带动发电机将机械能转换成电能[7]。本文中的车载风力发电是指车辆行驶后,由迎风面吸进自然风力到车辆后,驱动风力发电机运转,从而产生电能。为提高车载风力发电效率,则需要达到一定的风流强度才能启动风力发电系统。另外,车载风力发电系统是一套机械电力装置,不能与水接触,否则会造成发电机短路或机械装置锈蚀,为保证行车安全和装置耐用,若行车环境中的雨水量进入到车载风力发电系统,则关闭风力发电系统。由此可见,纯电动汽车风力发电的影响因素为行车环境和风流强度,即空气含水量与行车速度。
制动能量回馈是指车辆制动时,由车轮反向带动电机转动,将车辆的机械能转换为电能。采用制动回馈装置后,车辆在制动时驱动轮带动车载常用的永磁无刷发电机运转,发电机反向给驱动轮阻力,让车轮速度降下来,同时发电机被带动后可产生电能进而发电。由此可见,纯电动汽车制动回馈主要影响因素为制动强度即制动踏板行程变化率。
此外,纯电动汽车动力电池接受发电装置提供的电能需要考虑当前动力电池荷电情况,若电池的剩余容量非满载时,则需要车载发电装置工作。在常规制动中,优先机械液压制动还是制动回馈开展制动,需要结合发电机工作效率考虑。因此,还需要考虑动力电池SOC值、机械液压制动力和回馈制动力的比例[8]。
2 纯电动汽车风力发电与制动能量回馈结构
以某款纯电动汽车为研究对象,提出了一种基于自适应遗传算法的车载风力发电与制动能量回馈控制策略,该纯电动汽车发电控制模型结构如图 1 所示。

图1 纯电动汽车车载发电控制模型结构
车载发电控制系统核心为整车控制器(Vehicle Control Unit, VCU),它将接受来自车速传感器的车速v信号,空气湿度e传感器的含水量q信号,制动踏板的制动强度z信号,动力电池的SOC信号,获得这些信号后,VCU将发电信号传递给发电机控制器(Generator Control Unit,GCU)控制车载风力发电机发电,传递给电机控制器(Motor Control Unit, MCU)控制轮毂电机制动能量回馈,在车载发电机和制动能量回馈机发电时,将发出的电能通过车载交流充电机(On Board Charger, OBC)储存在动力电池中。
3 纯电动汽车智能发电模型
为便于智能发电模型的研究,对车载风力发电和制动回馈过程作如下假设:
(1)道路路面平整,无坡度;
(2)直路行驶,无转向;
(3)忽略轮胎变形、自然风力和风向变化。
车载风力发电系统打开进气格栅通过进气管道将空气流传送到风力发电机叶片上,带动风力发电机运转,完成发电[9]。图 2 为车载风力发电系统进气端。
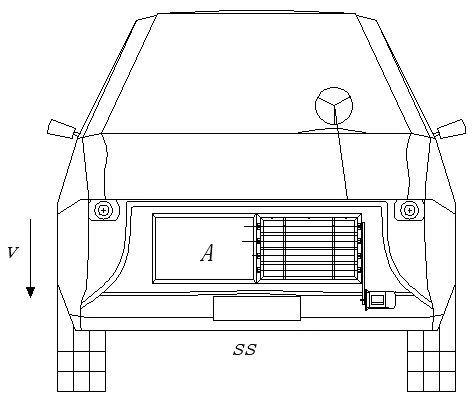
图2 车载风力发电系统进气端
风能计算方程为
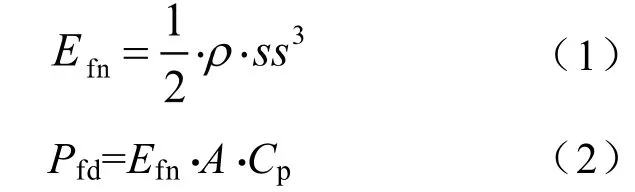
式中,Pfd为风力电能,W;Efn为风能密度,W/m2;Cp为风轮效率;ρ为空气密度,kg/m3;ss为吸入风道的气流速度,m/s;A为风道截面积,m2。
汽车制动时,受力关系如图 3 所示。所受到的力有驱动力Fq,滚动阻力Fg,空气阻力Fk及制动力Fz,车辆质量m,加速度a,摩擦因素μ,行车速度v。此时车辆所受到的合外力为
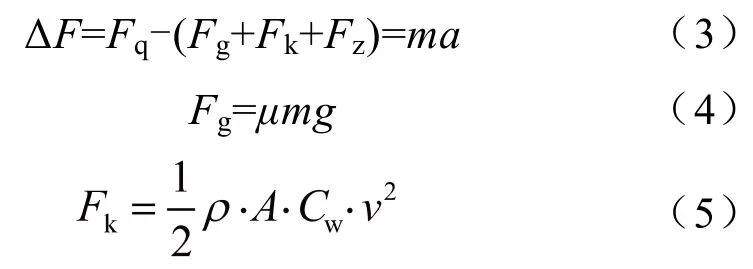
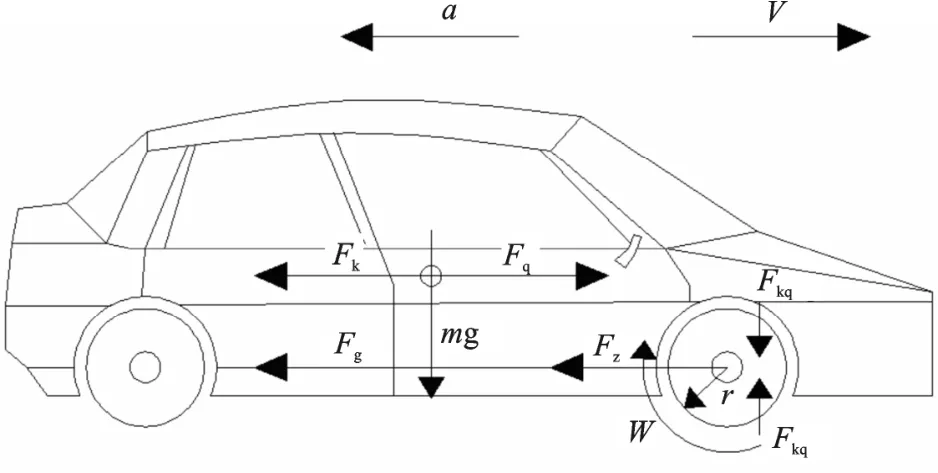
图3 汽车制动受力关系
若车辆制动前车速为v0,能量为E0;制动后车速为v1,能量为E1,则车辆采取制动前后的能量损耗△E为

由能量守恒定律可知,能量损耗与车辆受力关系为
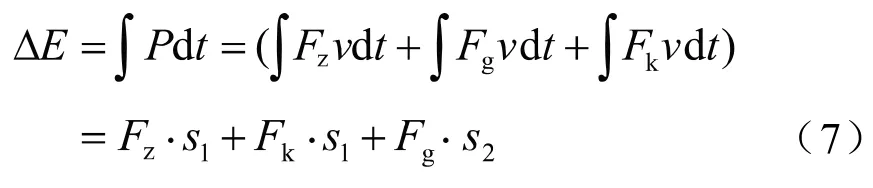
式中,s1为制动距离;s2为滚动距离。制动回馈能量来源于制动力生成的能量,而制动力可能是制动电机和机械液压系统单独或共同产生,Ej为机械液压制动系统产生的能量。

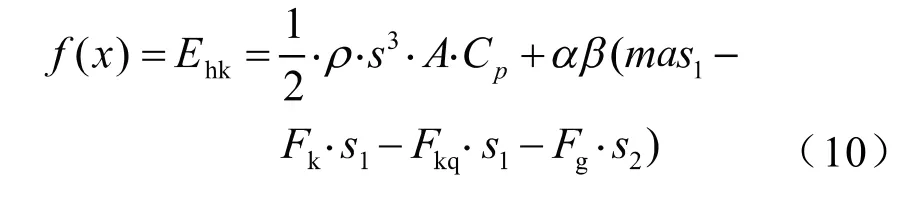
式中,Fkq为制动卡钳夹紧力;w为车轮角速度;r为车轮半径。由于产生的制动回馈能量储存到蓄电池还需要经过电机发电,OBC系统充电,因此,设定电机发电效率α,OBC系统充电效率β,结合式(4)—式(6)可得制动回馈电能为

结合纯电动汽车车载风力发电风能模型及制动回馈电能模型,可得到智能发电模型为
4 纯电动汽车智能发电模型仿真优化分析
基于式(3)—式(10)智能发电模型,纯电动汽车在行车过程中,如果空气中含水量太高,进入风力发电系统后,会使得水迹浸润到电气元件,导致电路工作不正常,长此以往也会造成各金属元件锈蚀。因此,为保证风力发电系统的稳定性,风力发电需满足以下几个条件,例如:(1)空气湿度<80%,风力发电靠风吹动叶片,从而带动发电机轴旋转发电,而风速太低,发电机运转速度过慢,发电效能低,为此设置风力发电条件;(2)车速>30 km/h;(3)动力电池的SOC<80%,若车辆动力电池中的电量余量较多、充电效率较低,为使得充电效率保持在高位,避免发电系统的反复启停。同时满足以上三个条件,则车载风力发电系统工作,进而开始风力发电。制动时满足制动减速度即制动强度不大,制动踏板行程未超过三分之二,车辆制动防抱死系统未工作和动力电池SOC<80%可充电条件,则制动回馈系统工作,进而开始制动发电。
4.1 自适应遗传算法
对于纯电动汽车发电量最大化地优化分析,传统研究按照遗传算法来进行影响因素的优化,遗传算法中的选择-复制-交叉-变异等过程都伴随着基因的环境适应性,而不是单纯的按照选择-复制-交叉-变异进行,容易得到局部最优解,为了提升遗传算法的有效性,需要对交叉概率,变异概率进行环境适应性的研究,以便在进行优化过程中寻得全局最优解。基于自适应遗传算法的发电控制策略改进点有以下两点。
(1)采用实数交叉,第i个染色体ai和第j个染色体aj在k位的交叉操作,增大交叉均匀性和随机性,避免出现局部最优解。
(2)变异操作时,若满足变异概率,第i个个体的第j个基因aij根据随机生成的[0,1]中的数f,f小于0.5时,变异基因为

f大于0.5时,变异基因为

其中

4.2 优化过程
(1)编码,二进制编码搜索能力较强,决策变量e、z、soc、v,参数数量较少,二进制编码完全满足需求。
(2)设置遗传算法参数,群体规模sizepop为 100,迭代次数maxgen为50,交叉概率 pcross为 0.6,变异概率pmutation为0.01。
(3)算法规则设定,选择方式采用常见的轮盘赌法,当生成随机数小于交叉概率pcross,则采用单点交叉配对的染色体进行交叉操作,交叉点后的染色体根据生成的随机数小于变异概率pmutation则执行变异操作。
(4)选择适应度函数,以安全为第一约束条件,使纯电动汽车尽可能多地回收能量。选择目标函数f(x)为风力发电和制动回馈能量的生成总量之和倒数,风力和制动回馈的发电能量可作为适应度函数F(x)。当适应度函数值越大目标越优,直达到预定的代数,优化结束并获得最优解。
基于上述控制方法,进行了仿真计算,表1为仿真中的主要参数。
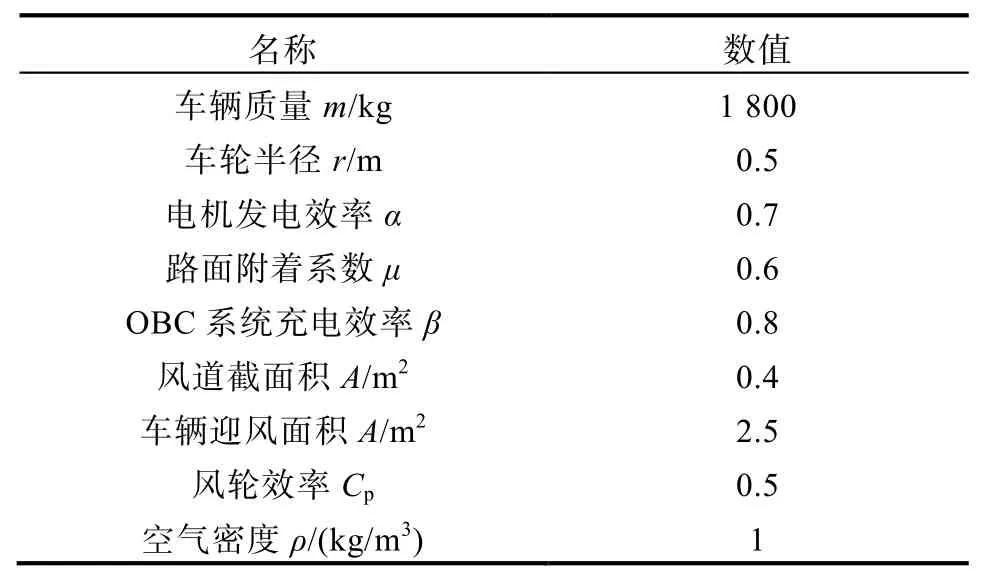
表1 仿真模型中的主要参数
在保证制动安全性前提下,仿真工况设定如下:初始车速v0为60 km/h,期望制动减速度为-0.5 g,在砂石路面上进行模拟仿真,附着系数μ设为0.6。通过Matlab优化仿真后的结果如图 4 发电电量关系图所示。

图4 发电电量关系图
通过仿真结果可知,刚开始启动时,发电机运转速度较慢,感应电动势较小,因此,车载发电电能增势较小、发电值较小。随着风力发电机与制动回馈电机平稳运转后,到30代后发电电量趋于稳定,此时,风力发电与制动能量回馈之和处于最佳发电值。通过仿真结果可以看出,采用的智能发电的控制策略能有效地提高电池的续航能力,在保证行车安全的前提下,将行驶过程中的风能有效转化成电能,常规制动时将制动时产生的多余能量回收利用,延长了电动汽车的续航里程。
5 结束语
对于纯电动汽车的自身发电,可能会随着行车速度、动力电池荷电状态SOC、制动强度等因素而变化,瞬时发电功率也需要进行及时调整,这就需要对发电过程进行智能控制,在保证车辆行车安全的同时,还要保证车辆行驶的动力性。因此,通过对用于车载发电的可回收能量进行分析后,得出的结论为风力发电和制动能量回馈两种方式较好,最后通过纯电动汽车的智能发电仿真进行优化分析,结果显示优化纯电动汽车智能发电的输入量后,其发电量将增加,这将增加纯电动汽车续航里程,并提高其经济性,展现出节能减排先进技术。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
防爆电机(2022年1期)2022-02-16
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
消费导刊(2018年10期)2018-08-20
汽车与新动力(2018年2期)2018-05-09
能源(2017年12期)2018-01-31
资源再生(2017年4期)2017-06-15
中国公共安全(2017年11期)2017-02-06
山东工业技术(2016年15期)2016-12-01