人机交互中空间指令的特点及其与个人特质的关系
2023-02-08 01:34马晓璐张君毅陈春林
心理技术与应用 2023年1期
史 琼 马晓璐 张君毅 陈春林
(1 南京理工大学紫金学院心理健康教育服务中心,南京 210023) (2 南京理工大学心理健康教育服务中心,南京 210094) (3 南京大学社会学院心理学系,南京 210023) (4 南京大学工程管理学院,南京 210008)
1 引言
随着科技的迅速发展,机器人逐渐走进大众视野,智能型机器人与人类合作也越来越频繁。无论是在服务业(Zhang et al.,2017)、制造业(Krot &Kutia,2018)、养老行业(Ehrenmüller et al.,2019)还是教育领域(Crnokic et al.,2017),机器人在人们日常生活和工作之中都扮演着愈加重要的角色,甚至逐渐在某些方面替代人类。一般而言,在空间任务方面的人机交互合作包括寻找指定物体、将物体安放到指定位置、指挥机器人到指定地点。空间任务的执行离不开空间认知,它是人们感知空间信息的加工过程,包括三维立体物体的大小、形状、位置、距离以及它们在心理空间或物理空间中的关系。空间认知对人类来说是一项简单的自然行为,但对机器人却并不容易。目前,探讨空间任务中的人机交互合作已然成为人-机器人交互领域的一个重要前沿研究方向与趋势。
1.1 空间指令中的认知机制
在计算机语言中,为交互对象描述空间布局或具体目标物体位置被称为指代生成(Krahmer &Deemter,2012),涉及视觉特征描述和空间关系描述。视觉特征指人们在特定的场景中所感受到的视觉刺激,包括物体的颜色、立体深度、线路排列、曲率、交叉、明暗界限等(Li et al.,2016)。定性空间关系包括拓扑性空间关系和映射性空间关系。拓扑性空间关系表示物体间的临近程度,例如“靠近”;映射性空间关系的表达依赖于参考框架,表示一个物体相对于另一个物体的方向,例如“左”“前”,是空间关系表达的一个重要基础(Kelleher &Kruijff,2006)。
物体间映射性空间关系的表达会随着参考框架的不同而改变。参考框架包括原点、坐标系统、观察视角、参考物体及目标物体,一般分为三类:相对参考框架、内在参考框架和外在参考框架。在相对参考框架的坐标体系中,原点可以是交互对象的任意一方,即空间关系描述可依赖于交互双方中其中一方的观察视角。因此,相对参考框架又可进一步分为自我中心和对方中心。内在参考框架又称以物体为中心的参考框架,是以坐标体系中一个有方向性的物体为原点,观察的视角遵循物体内在的方向。外在参考框架又称绝对参考框架,使用固定不变的方向作参考去判断空间关系,不受物体形状和方向的影响,最典型的外在参考框架就是东、西、南、北四个方位(Taylor &Tversky,1996)。
参考框架存在三类视角:相对视角(包括自我视角和对方视角)、内在视角(内在物体视角)和绝对视角(世界框架)(Li et al.,2016;Trafton et al.,2005)。广义上空间观点采择可以选取这三类中的一种为原点。而很多研究中常见的观点采择是指人们能够想象自己站在他人的位置上,推断自己从他人角度看到的场景的能力(Fischer &Demiris,2016;Tarampi et al.,2016)。基于空间任务的不同,观点采择分为两个层次:层次一为视觉透视,即推断对方可以看见什么物体,提示交互对象与物体之间的视线被追踪;层次二为空间观点采择,估算从交互对象的视角看到的空间位置场景是怎样的(Michelon &Zacks,2006)。
从认知负荷的角度来看,对于指定物体的描述,只解决感知问题的特征描述所牵涉的认识负荷是最低的,其次是描述物体间距离的拓扑关系,而依赖参考框架来描述物体间的方位从而确定物体的映射关系所包含的认知负荷最大(Kelleher &Kruijff,2006)。在交互过程中,我们希望尽量降低认知负荷,使得合作对象更容易了解说话者的语义,但还要兼顾模糊性问题。因而在复杂的现实空间任务中,要解决模糊性问题,通常会在空间描述中运用参考框架或者采用参考框架和视觉特征结合的方式(Sisbot et al.,2010;Trafton et al.,2005)。
空间指令的描述方式通常分为三类:(1)自然取向,即采用自然的语言把表示空间关系的词语联系在一起,例如“直接拿起最右边的蓝色木块左边的黄色木块”。(2)算法取向,对空间任务分阶段进行描述,反映一个视觉搜索的过程,例如“在桌子的右边有一个桔色的木块,紧挨着桔色木块有一个黄色的木块,请拿起这个黄色木块”。(3)动作取向,指令中包含动作指示,要求对方有特定的动作,移动手臂去抓取指定物体,例如“站起来,将手伸过桌子,拿靠近我的蓝色木块紧挨着的黄色木块”(Li et al.,2016)。
1.2 人-机器人交互的相关研究
为了让机器人能够像人一样感知和思考,很多学者在人-人空间交互认知机制基础上,探索人类的认知结构,并设计人-机器人交互系统(Mu et al.,2016)。例如,在对宇航员相互合作中自然语言分析的基础上提出观点采择认知结构,并在此理论框架下建立了人-机器人交互模型(Trafton et al.,2005);基于认知科学中思维理性的自适应控制体系,建立了人-机器人空间认知交互系统(Mu et al.,2017)。但人类的空间认知非常复杂,以往的交互研究更多是以简单空间参照关系为主的导航任务,或是对单一空间任务进行研究,如空间旋转,我们还需要通过较多桌面任务或组装任务去探讨更广泛的空间认知元素(Li et al.,2016)。从更复杂的交互任务空间关系语言中了解人们使用参考框架的特点,可以帮助机器人更加像人,让人-机器人交互变得更加自然、顺畅。
与此同时,有研究发现(Li et al.,2016)人与不同的合作者交互时,会选择不同的语言描述方式,呈现出“合作者效应”。有研究认为,交互中视角的选择与交互过程中合作者是否提供反馈有关,如果有良好的反馈,人们的指令更多地遵循最小合作努力原则(Clark &Wilkes-Gibbs,1986),而当缺少反馈时,为确保指令被理解,人们更多遵循最小沟通努力原则(Schober,1998);基于机器人的感知能力普遍没有人类丰富,人们与机器人交互比与人交互采用更基本的指令(Moratz et al.,2001)。有研究认为在模拟情景中,人与机器人交互比与人交互更多使用自我中心视角,且更少使用礼貌用语;还有研究认为人-机器人交互中,空间指令的语言特点与人们相信机器人所拥有的智能有关,而人们对于机器人智能的判断与机器人的外形有关(Fischer,2006)。
1.3 人-机器人交互与个人特质的关系
研究发现,对机器人的智能判断受机器人本身因素的影响,同时也是人们对机器人的感知反应。人们对机器人的感知反应受个体的“拟人观”“生命性”“安全感”等特质的影响(Bartneck et al.,2009)。观点采择不仅是人类基本的空间认知机制,涉及空间旋转,并且具有社会认知的部分,不少研究关注了个体差异对它的影响,例如性别(Tarampi et al.,2016)、社交能力(Shelton et al.,2012)、共情能力(Gronholm et al.,2012)。有学者提出,心理学领域中对于观点采择的研究可划分为空间性任务和社会性任务(Shelton et al.,2012)。
个体的共情能力是影响其观点采择的重要因素(Gronholm et al.,2012),当个体的共情能力更高时,他们在空间换位思考方面的表现会更好。有研究发现,在空间条件下,男性空间换位思考能力可能更具优势;而社会换位思考能力(共情)则没有呈现出显著的性别差异(Tarampi et al.,2016)。个体的社交能力影响其观点采择,尤其是任务场景中有人类形象时,社交技能较好的被试往往比社交能力较差的被试更能准确采择场景中的人类视角(Shelton et al.,2012)。也就是说,个人特质是影响个体社会认知的重要变量,而个体社会认知又与人-机器人交互密切相关,因而个人特质可能在人-机器人交互中对空间指令描述偏好上产生影响。
事实上,人-机器人交互是一个多学科交叉的领域,涉及认知科学、人工智能、人机交互、通信技术等,每个学科的专家学者在研究时可能无法对其进行全面的探讨和考虑,目前该领域对个人特质的相关探索并不多见(Bartneck et al.,2009)。然而相关领域的探索对于提高人-机器人交互的效率、个性化人机交互界面的设计等诸多方面有着重要的参考意义。
1.4 研究问题与假设
已有相关研究中空间任务以空间旋转或导航任务为主,空间认知元素的覆盖不够全面;在一些交互实验中,合作情景多使用虚拟或假设情景,无法贴近真实合作场景,得出的结论推广受限;而且,目前国内外还鲜见用实证方式探讨空间描述方式与个人特质关系的研究。故本研究希望通过多种不同的桌面任务,进行人-人交互和人-机器人交互中空间指令的对比分析,进一步认识人类空间描述偏好的内在规律,并从实证的角度更深刻地理解人类对于机器人的认知对空间指令的影响,同时关注互动过程中人的个人特质因素。基于现有研究的结论,本研究假设:(1)人们的空间描述类型更多偏好参考框架的运用以确保交互的有效性,在能够确保任务有效沟通的前提下,才尽量选择低认知负荷的空间描述类型;(2)合作者的智能影响空间语言的选择,人-人交互和人-机器人交互中使用的空间指令存在“合作者效应”;(3)个体空间能力与参考框架的使用有关,共情能力和社交能力与观点采择的使用有关。
2 方法
2.1 被试
在某大学自愿招募107名学生(男生55名,女生52名),平均年龄为19±0.22岁。所有被试听力正常,视力或矫正视力正常,无色盲色弱。在实验结束后他们会获得相应报酬。被试随机分为两组,一组在实验中的交互对象为人类(H组),共53人;另一组在实验中的交互对象为机器人(R组),共54人。两组被试的空间能力(MH=20.33,MR=21.43,t=0.970,p>0.05)、共情能力(MH=75.46,MR=75.52,t=0.044,p>0.05)和社交能力(MH=5.90,MR=5.59,t=-0.394,p>0.05)均不存在显著差异。
2.2 实验材料
2.2.1 空间交互场景
本研究通过构建五个空间交互的情景(如图1所示)设置了七个桌面任务,被试需要通过语言描述使其合作对象明确在每个场景中特定的物体(图1中已圈出)。实验情景涵盖了空间认知的关键要素:情景1在空间中设置了遮挡物(对应任务考察对VPT、SPT的运用);情景2在空间中排列了多个无标记物的同质物体(对应任务考察无标记物情景的空间描述);情景3设置了无方向标记物(对应任务考察对拓扑空间关系的运用);情景4和情景5设置了有方向标记物,但具体实验任务的难易程度不同(对应任务考察对内在参考框架的运用)。为确保每个情景中物体间关系不变,同时也为节省实验中更换情景所耗费的时间,每个情景中物体的排列事先固定在一块白板上,并在白板背面标记情景1—情景5。
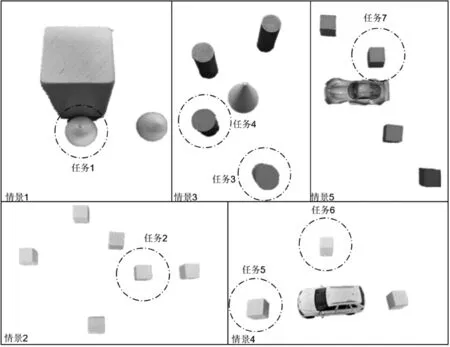
图1 实验情景1—5
R组采用了法国奥尔多巴伦公司(Aldebaran Robotics)生产的高度为58厘米的白色人形机器人作为合作对象。在实验中,机器人不会根据指令做出行为反应,但是具有基本的行为模式——可以感应声音,转动头部和肢体,让被试感受到它具有互动性。H组中,被试的合作对象为一名同校大三男生。在实验中,该生不会针对被试的空间指令做出任何行为和言语上的反应。
2.2.2 基本共情量表
采用Jolliffe &Farrington编制的基本共情量表,用于测量个体体验或理解别人情绪的能力(Jolliffe &Farrington,2006)。问卷共有20个条目,由四个维度组成,其中“朋友的情绪对我影响不好”等11 题为情感共情(AE),“我常常察觉不到朋友的情绪感受”等9题为认知共情(CE),每题均采用5点计分。分值从20分(缺少共情)到100分(高水平共情)。该问卷在中国青少年群体中具有较好的信效度(李晨枫等,2011)。在本研究中,该量表的Cronbach’sα系数为 0.72。
2.2.3 自闭症谱系量表
自闭症谱系量表由Baron-Cohen编制,主要用于判断智力正常的成人自闭症特质的程度(Baron-Cohen et al.,2001),共50个条目,包括社交技巧、注意力的转换、沟通、对细节的注意及想象力五个分量表,每个分量表十个条目,每个条目给出四个程度选项。若题意为自闭症特质的,选择“完全同意”或“稍微同意”皆得1分,选择“稍微不同意”“完全不同意”皆得0分;若题意为非自闭症特质的,则评分规则相反。该量表具有较高的表面效度和结构效度。将包含“我喜欢社交场合”等条目的社交技巧分量表和包含“我擅长社交闲谈”等条目的沟通分量表合并,可用于测量“社交能力”,与典型的社会行为一致(Shelton et al.,2012)。本研究中,采用上述分量表测得被试的社交能力,得分越高,说明社交能力越差,其Cronbach’sα系数为0.79。
2.2.4 修订版普渡大学空间可视化测试——旋转
我们对修订版普渡大学空间可视化测试——旋转(Purdue Spatial Visualization Test:Rotations,PSVT:R)进行了翻译,形成了中文版PSVT:R量表。本研究中,该量表的Cronbach’sα系数为0.85。PSVT:R量表中文版由30个二维立体图形组成测试题目,被试要对其进行心理旋转操作,并从给出的图形选项中选出正确答案,选对一题得1分,总分在0~30分之间。测试之前,先给被试展示两个练习题目(如图2),并对如何操作给予相应指导语。
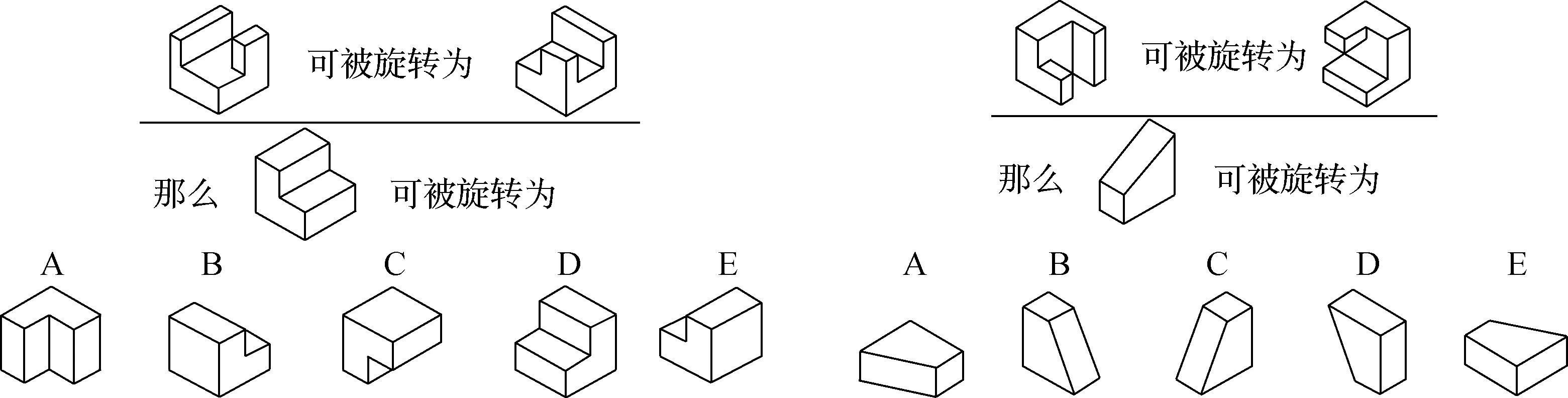
图2 修订版PSVT:R图例
2.3 设计和程序
为考察被试与不同合作者的空间指令差异,我们采用了组间实验设计,即被试被随机分配到H组或R组。在实验中,被试与合作对象面对面而坐,实验者用手指指出情景中的指定物体,被试需要用语言描述让合作对象明确指定物体,不能够使用身体姿势(图3为被试与机器人合作的场景)。每组被试都按照任务1到任务7的顺序完成空间指令任务。为准确收集空间指令(收集的空间指令举例见表1),整个实验过程被录音。最后,被试还需要依次完成基本共情量表、自闭症谱系量表、修订版PSVT:R量表和人口学信息填写。
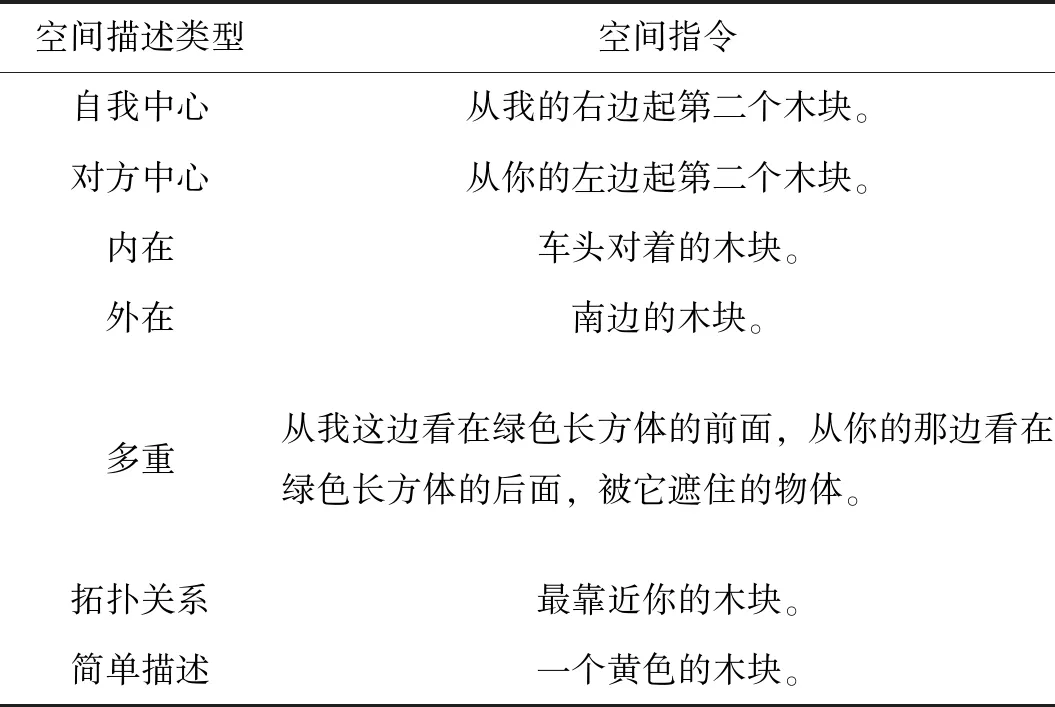
表1 收集的空间指令举例

图3 被试与机器人合作场景
2.4 数据收集与分析
删除5名被试的无效数据后(在描述空间指令时只采用了简单描述,对完成空间任务没有功效),共得到102人(其中H组48人,R组54人)714条有效空间指令。
空间指令录音被人工转化为逐字稿,并从以下几个方面进行分析:(1)比较H组和R组完成七个任务的空间指令特点,并分析其参考框架的使用、视觉特征和指令类型的异同;(2)比较有标记物1情景中(场景3~5)物体有无方向是否影响参考框架和指令类型的选择;(3)分析参考框架和个人特质的关系。
3 结果
3.1 总体空间指令特点
对收集的空间指令进行人工分析,总体上看,有参考框架的描述类型占比77.87%,远高于无参考框架类型(χ2=81.14,p<0.001)。根据空间任务的不同,各任务中空间描述类型偏好存在差异,正确率(采用人工检验的方式,判断指令是否能让交互对象拿取正确物体)也有不同,总体上各任务中选择率较高的空间描述类型对应的正确率也较高,如图4所示。
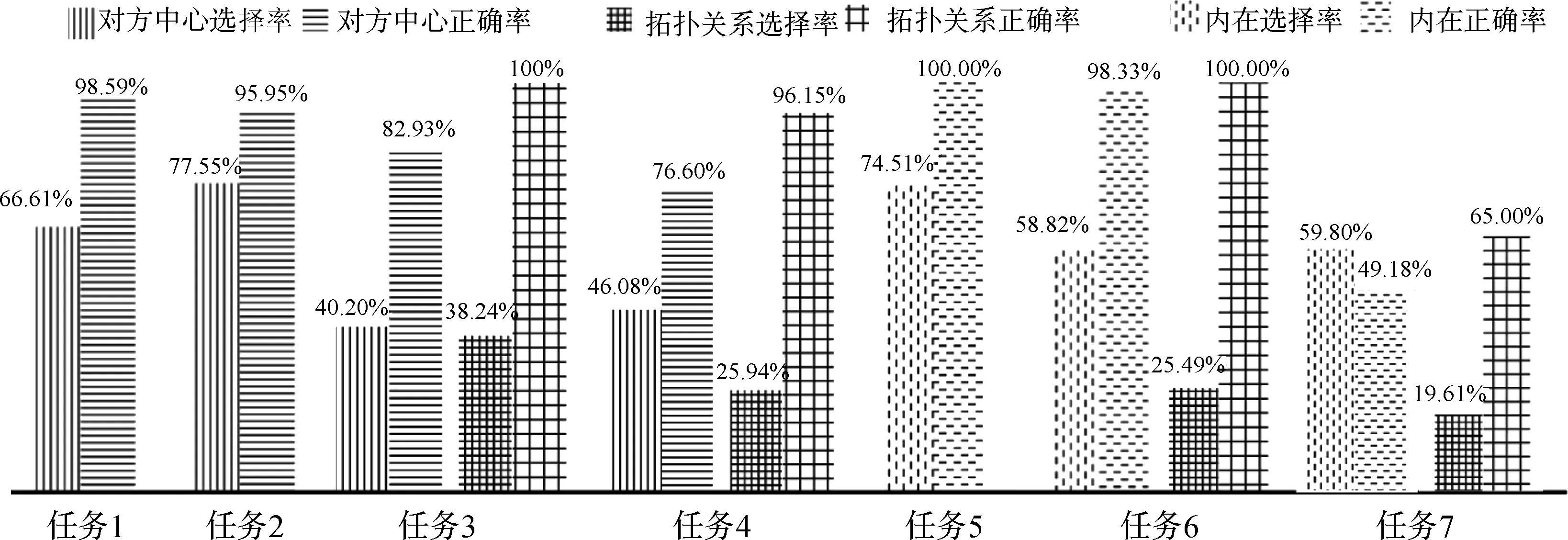
图4 各任务中选择率较高的空间描述类型的正确率
对H组和R组的空间指令进行比较,重点关注了两组被试在空间描述类型、视觉类型及空间指令类型方面的差异。对比两组被试选择的空间描述类型种类,发现H组和R组在三种及以上空间描述类型的选择上存在显著差异(χ2=102.00,p<0.001)。对比两组被试空间描述类型的种类,H组被试在七个任务中空间描述类型的运用种类在三种及以上的占比79.17%,而R组只占比53.70%。
就空间描述类型而言,结果发现两组在七个任务中选择空间描述类型的分布相似(见图5),两组均较多地使用了自我中心、对方中心、内在参照和拓扑关系。据此,将空间描述类型合并为以上四种和其他类型共五种,通过卡方检验发现两组被试在五种空间描述类型的运用上存在显著差异(χ2=18.49,p<0.001)。进一步比较发现,H组比R组更多运用自我中心(p<0.05);R组比H组更多运用对方中心(p<0.05)和拓扑空间关系(p<0.05)。
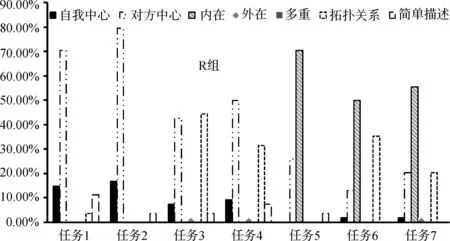
图5 H组和R组各任务中空间描述类型分布
通过卡方检验发现,H组和R组采用的视觉特征类型存在显著差异(χ2=61.91,p<0.001),两组采用的指令类型也存在显著差异(χ2=70.73,p<0.001)。进一步进行事后多重比较,得到调整后标准化残差,结果见表2。指令中的视觉特征包括有外部特征(形状、颜色)、无外部特征(例如,车头对着的物体)、排序、距离、综合(包含外部特征、排序、距离),其中两组最多使用的视觉特征均为颜色加形状,H组为91(27.08%),R组为119(31.48%),两组无显著差异;H组比R组更多使用无外部特征、排序、形状、颜色,R组比H组更多使用排序加外部特征、距离加外部特征等视觉特征,并且差异均存在显著。两组指令类型的分布见表2。最多使用的指令类型两组均为自然取向,但H组(94.05%)显著多于R组(79.63%);R组(18.52%)更多使用动作取向,而H组(0.30%)几乎不太使用;两组中算法取向使用的均不多,但H组(5.65%)使用率显著高于R组(1.85%)。
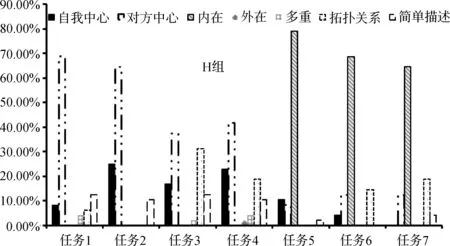
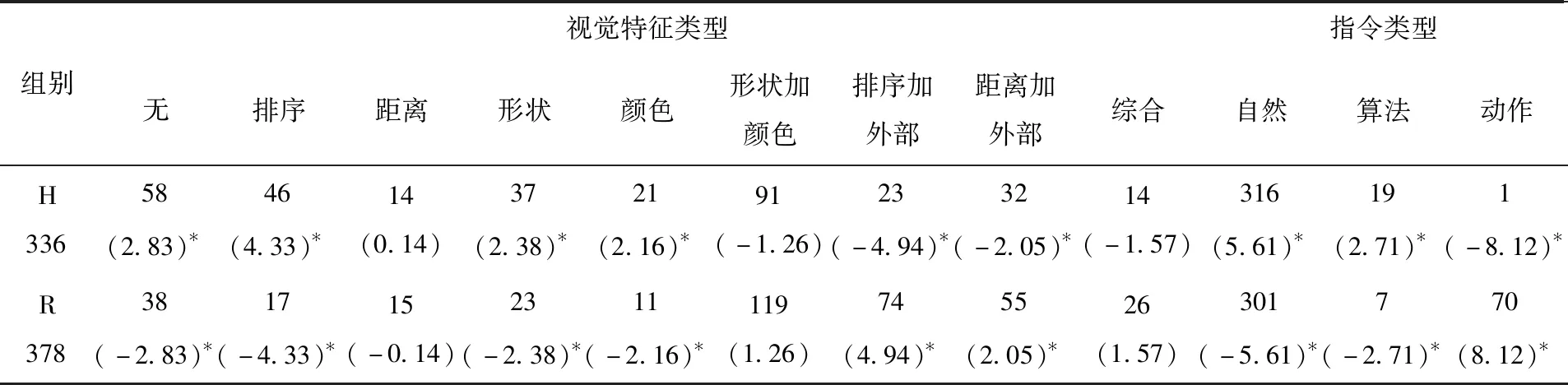
表2 不同组别视觉特征类型和指令类型分布情况表
3.2 有标记物情景中的空间指令特点
为比较有标记物的情景中,标记物有无方向是否影响空间描述类型和指令类型的选择,选择无方向标记物(圆锥体)任务(任务3和4)和有方向标记物(小汽车)任务(任务5和6),结合组别(H组和R组),组成四种实验场景,对以上实验场景中空间描述类型和指令类型的选择分别进行卡方检验。结果发现,四种实验场景中,空间描述类型的选择存在显著差异(χ2=233.19,p<0.001)。进一步进行事后多重比较,观察调整后标准化残差,发现不同实验场景指令类型的差异与任务有无方向和交互对象类别都有关(见表3)。在两组无方向实验场景中被试对对方中心的选择显著高于两组有方向实验场景,而内在参照的选择显著低于两组有方向实验场景;被试在H组无方向场景下对自我中心和其他类型的选择均显著高于其他三种实验场景;被试在R组无方向场景下对拓扑关系的选择均显著高于其他三种实验场景。
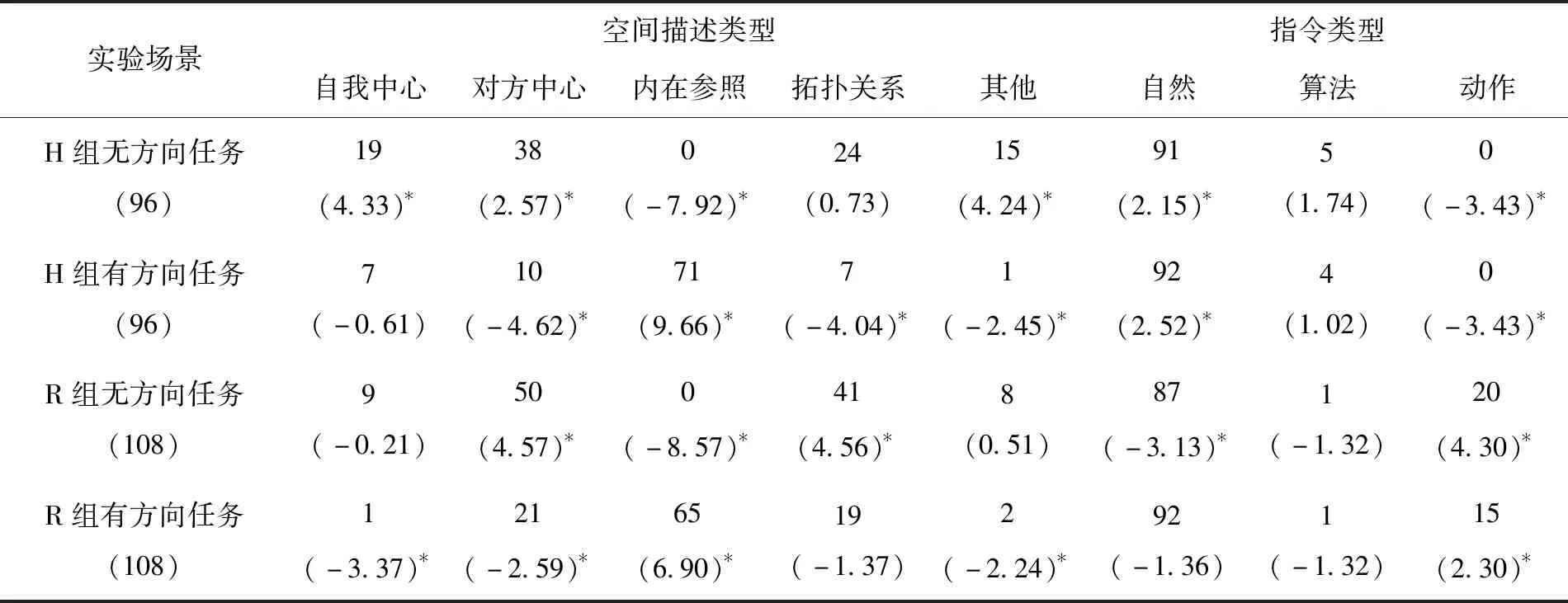
表3 不同实验场景空间描述类型和指令类型分布情况表
四种实验场景中,指令类型的选择存在显著差异(Fisher精确检验,t=45.66,p<0.001)。进一步进行事后多重比较发现,不同实验场景指令类型的差异主要源于不同交互对象(见表3)。被试在H组有方向和无方向实验场景中都比R组有方向和无方向实验场景中更多使用自然取向,更少使用动作取向。
3.3 参考框架偏好与个人特质的关系
空间信息的描述离不开参考框架的运用,其中进行他人观点采择的对方中心,适用于任何空间场景。所以,本研究关注空间指令中参考框架及对方中心的使用率与个体空间能力、共情能力及社交能力的相关性,结果见表4。我们发现总体上参考框架使用率与空间能力存在显著正相关;对方中心使用率与共情能力存在显著正相关(见表4)。进一步研究不同合作对象的空间指令中参考框架及对方中心的使用率与个体空间能力、共情能力及社交能力的关系,H组只有参考框架的运用与被试的空间能力存在显著的相关性(r=0.30,p<0.05);而R组参考框架的运用与被试的共情能力存在显著的相关性(r=0.30,p<0.05),同时对方中心视角的选择也与被试的共情能力存在显著的相关性(r=0.34,p<0.05)。
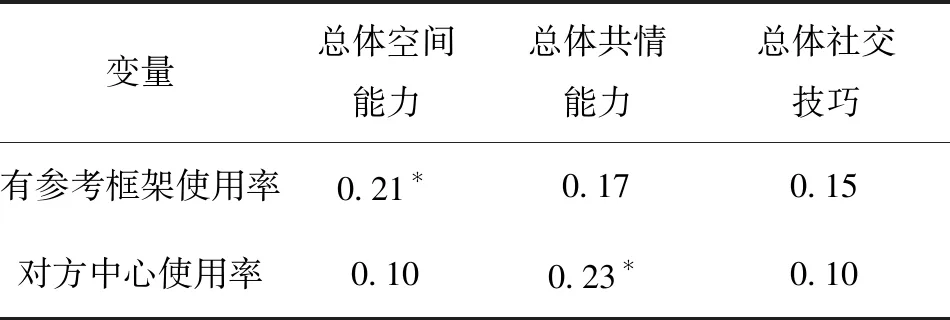
表4 个人特质与参考框架偏好的相关性(r值)
4 讨论
4.1 总体空间指令的特点
本研究通过不同类型桌面任务的实际操作,发现不同空间描述类型的偏好存在差异。总体而言,选择运用参考框架的比例较高。空间的布局和环境影响视角的选择(Taylor &Tversky,1996)。本研究的结果验证了这一观点。研究发现,面对较为复杂的空间任务时,必须使用空间参照,仅仅使用简单描述无法解决模糊问题。采用他人视角的对方中心总体使用率较高,因为它适用于遮挡情景、有标记物情景等几乎各种任务。此外,当空间内存在内在参照物时,被试则更偏好运用内在参考框架。当目标物与参照物存在明显的空间距离关系时(例如任务3),会有部分被试偏好拓扑关系(占比38.24%),但其总体使用率仍没有高于对方中心(占比40.20%)。可以看出被试习惯运用参考框架进行空间描述。
另外,通过录音数据,我们得出每条空间指令的表达时长,以衡量空间指令的认知负荷。发现被试的空间描述类型偏好没有优先考虑认知负荷,遵循最小合作努力原则。在可以使用拓扑空间的任务中(例如任务3),拓扑关系的表达时长较短,正确率较高,认识负荷较小,理应是首选,但从实验结果看并非如此。拓扑关系的表达简单,容易被理解,但是产生模糊性的可能性大,在复杂的空间布局中容易产生干扰,受到参考物的位置、其他物体与参照物的距离、参考物的大小及突出性等因素的影响,只有在非常明显的拓扑关系时人们一般才会选择(Kelleher &Kruijff,2006)。有研究表明,当合作对象能够让指令发出者明确他们完全能明白指令时,指令发出者才会遵循最小合作努力原则。而当缺少反馈时,指令发出者不知道合作对象是否能够明白指令时,他们一般会采用对方视角,方便合作对象理解指令,遵循最小合作沟通努力原则(Fischer,2006),即人们在权衡正确率和认知负荷的情况下进行空间参照的选择。综上结论支持了假设1。
本研究对人-人交互和人-机器人交互的空间指令进行比较发现,在空间描述类型上二者大体接近,在视角特征类型和指令取向上有一定差异,存在一定的合作者效应,即支持了假设2。另外,研究发现对空间描述类型的选择影响较大的是情景中的标记物是否具有方向性。
人与人合作时互动的倾向更加明显,空间描述类型和视角的选择上比较丰富,而人与机器人交互时,空间描述类型及视角的选择相对缺乏多样性。人与机器人交互时,空间指令的使用策略关键则取决于他们对智能体的认知,当机器人的外形更像人时,人们对待它的态度和行为会更加接近于人(肖承丽等,2019)。本研究中使用的机器人是有一定交互性的人形机器人,大部分被试认为它具有一定的智能性,因此在与其交互时,礼貌用语的使用、视线的交互情况及空间描述方式上大体和人-人交互一致。同时因为没有合作反馈,人们在不确定机器人实际智能性的情况下,偏好的空间指令更加清楚、易理解。因此,本研究结果发现,R组中对方中心的空间描述方式及对方视角运用显著较多,认知负荷低、不涉及复杂参照的拓扑关系的运用显著较多。在视觉特征描述上,R组较少使用“物体”“东西”等无外部特征的抽象指代,使用视觉特征组合的描述更多,倾向于使用更加具体的描述。这也体现在R组(8.36s)比H组(7.66s)总体平均表达的时间更长,无效简单描述更少,平均正确率也更高(R组正确率84.66% ,H组正确率79.17%)。指令取向上,人-机器人合作时动作取向的指令显著多于人-人交互。也有研究发现人们与概念中低智能体合作时更多使用路径导向的指令(Fischer,2006),当人对机器人智能水平有更高认知时,动作指令应该会进一步下降。
4.2 参考框架偏好与个人特质的关系
总体上,个人空间能力与参考框架的运用显著相关,对方中心的使用与共情能力显著相关,部分验证了研究假设3。
自我中心、对方中心和内在参考可以看作以空间中一个物体为原点建立坐标系,进行0~180度空间旋转作为不同的观察视角,其中,自我中心视角旋转0度,对方中心视角旋转180度,内在参考视角是将观察者代入有方向的标记物进行相应度数的空间旋转。相对于前三者而言,外在参考需要有对于外部环境具有空间方位的识别能力。因此,有参考框架的空间描述类型选择与空间旋转能力或空间方位感存在一定的关系。而简单描述是空间视觉描述,拓扑关系只是距离远近的表达,这两种无参考框架的描述类型没有空间旋转操作的参与,与空间旋转能力没有显著相关性。与机器人合作中被试更多使用了低认知负荷的拓扑关系的描述类型,所以参考框架的偏好与空间能力的关系受到影响。
有研究证明,观点采择的第二层水平是一个需要付出努力的参考框架转换过程,发生在较大的空间旋转角度任务中(一般大于60度),而在小角度的空间任务中主要运用的是视觉匹配(Janczyk,2013),即以采择他人视角的对方中心比运用较小角度的参考框架需要的旋转计算和认知负荷高,对空间旋转能力的要求更高。正因为个人会根据任务特点能动地选择较为适合的空间描述类型,而在一些任务中往往不需要采用对方中心,所以从总体来看个人空间能力与对方中心的选择没有显著相关性。
对方中心“牺牲”了自我中心的先天优势,努力“从别人的角度去看”,这种观点采择可能是人类长期社会互动过程中形成的一种有效策略。可以说,人在情景中的出现促使了观点采择的产生(Tversky &Hard,2009)。如果说空间能力是顺利完成观点采择的相关技能之一,那么是否采用观点采择则需要个体有“换位思考”的意愿,这是一种社会性的体现。共情特质就包括社会性观点采择的维度(Jolliffe &Farrington,2006),而空间性观点采择和社会性观点采择并不相互排斥,在许多社会情境中,人们会从空间的角度来观察社会意图,计划共同行动,或者进行沟通交流(Tarampi et al.,2016),可以说空间性观点采择是社会性观点采择的基础。被试在不明确机器人智能的前提下,为了交互的有效性,空间指令更多采用对方中心或较为明晰的拓扑关系,更多运用对方视角,空间语言表现出清楚、易懂、具体等特点,这些都是共情的体现。因此,与机器人合作的被试的参考框架运用及空间性的观点采择与共情特质存在一定的关系。
心理学上对于观点采择的研究,分为空间性任务和社会性任务——情景中人类形象的出现暗示社会性的情景(Shelton et al.,2012)。有实验观点认为社交技能和观点采择之间有着密切的关系,一般存在于更具社会性的情景中(Shelton et al.,2012)。也有研究发现好的社交能力与观点采择的关系不论是在空间性任务还是社会性任务中都是有限的而且不一致的,可能是因为社交能力的多维性(Tarampi et al.,2016)。从这些研究结论可以得出社交能力与观点采择的相关性是有条件的。本研究发现社会技能与观点采择的相关性不显著,其可能的解释一方面与具体空间任务有关,另一方面与社交技能的测量有关。虽然本研究中实验情景有合作者出现,但空间任务是对积木、汽车等没有关联性物体的空间关系的描述,与现实生活情境有一定距离,并且涉及复杂的参考框架和多元视角,更像是一项空间性任务,而不是一项社会性任务。另外,多元智力理论认为,广义的社交能力应该等同于社交智力,是指在人际关系中理解包括自己在内的人的感情、思想和行为,并根据这种理解采取适当行动的能力。Marlowe确定了社会智力的五个领域——亲社会态度、社交技能、共情能力、情绪性和社交焦虑(Marlowe,1986)。本研究中被试通过AQ中社会技能和沟通分量表测得的社交能力侧重典型社会行为,而社交能力中对他人的感知和移情感受的社会意识部分可能与观点采择的关联性更大。
4.3 启示与不足
实验主要针对无反馈情况下的交互情景,而有反馈的交互才更贴近实际,可能会产生更丰富的信息,这也是我们今后的研究方向。此外,与人合作中,合作对象的个人特点可能也会对交互实验存在一定的影响。本研究中社交能力与观点采择未见相关性,今后对于社交能力的测量可以更有重点,进一步区别社交意识和社交行为能力的测量。在空间指令特点与个人特质的研究中,现有的理论研究比较有限,因此本实验只是对现有研究的验证,未来可以结合个体“拟人观”“生命性”“安全感”等因素对空间语言的影响作更多的探索。
5 结论
本研究通过实证研究发现:(1)面对不同空间任务,人们更倾向选择参考框架去解决问题,并在权衡正确性和认知负荷下选择参考框架的类型。(2)对交互对象的心智判断影响人们空间语言的使用。判断交互对象的心智越接近人类,人们使用的空间指令与人-人交互类似;在不确定交互对象心智水平的情况下,人们使用的空间指令比较基础、具体、容易理解。(3)个人空间能力对参考框架的使用有一定的影响,共情能力与观点采择存在一定的关系。
(致谢:感谢Yoon教授为本研究提供了修订版PSVT:R的使用权。)
猜你喜欢
小学生学习指导(当代教科研)(2021年6期)2021-05-23
教书育人(2020年11期)2020-11-26
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
机电信息(2014年27期)2014-02-27
智慧与创想(2013年3期)2013-05-09