虚拟复阻抗下垂控制的多逆变器并联小信号建模
2023-02-15 12:01张继红张自雷杨培宏吴振奎冀伟成
中国测试 2023年1期
张继红,王 娟,张自雷,杨培宏,吴振奎,冀伟成
(1.内蒙古科技大学 内蒙古自治区光热与风能发电重点实验室,内蒙古 包头 014010;2.内蒙古科技大学信息工程学院,内蒙古 包头 014010)
0 引 言
近年来,分布式发电技术以其能源利用率高、环境污染小、可靠性高等特点受到了广泛关注[1-3]。分布式发电(distributed generation,DG)是未来电力系统发展的主要趋势之一,也是大型电网的有力补充与重要支撑。分布式发电中,逆变器是电源与电网的关键接口设备,直接关系到系统效率、供电质量与稳定运行,在改善能源短缺和环境污染方面发挥着重要作用[4-6]。
为解决多并联逆变器之间互联线繁杂、故障概率增大等问题,基于下垂控制的无互联线逆变器控制技术不仅可以大幅降低系统复杂程度,而且可以提高系统稳定性,是逆变器并联控制的发展趋势。例如,通过模拟同步发电机的电压和频率下垂特性来调整逆变器输出功率的论文较多[7-11],文献[12]提出一种改进传统虚拟阻抗控制策略,通过修改电压参考值,在虚拟阻抗上叠加自适应项,解决电压波动问题,但存在虚拟阻抗值的变化会引起系统失稳现象。文献[13]在下垂控制过程中引入额外积分环节以抑制系统环流,但此方法不适用于通信量较大的网络。文献[14]提出了改善电压质量的自适应虚拟阻抗策略,但对于引入虚拟阻抗参数的设计要求较高,否则将导致输出电压出现跌落的问题。上述控制策略各自具有创新性,但其控制效果均受限于下垂系数和虚拟复阻抗值的选取。因此本文针对逆变器并联下垂系数及虚拟复阻抗定值问题展开深入研究。
小信号稳定性分析建模法作为针对逆变器建模的一个重要的研究方法[15],目前在新能源发电领域中得到了广泛应用。由于分布式发电运行稳定性稍差、并受电力电子器件影响容易产生谐振,因此,将小信号稳定性分析法应用于新能源发电系统可有效分析多逆变器并联的环流问题,谐波抑制问题,是提高分布式发电及微电网系统可靠运行的重要手段。
本文针对逆变器间线路阻抗不匹配、传统下垂控制策略无法实现功率有效均分的问题提出一种新的下垂控制方法。该方法在功率外环中引入新下垂控制式,并在电压电流双闭环中引入虚拟复阻抗,使每个逆变器之间的线路阻抗匹配,从而缩小功率均分误差。
1 多逆变器并联模型
如图1所示,多逆变器并联控制电路由外部功率环和内部电压环、电流环组成,其协同工作可有效抑制高频振荡和阻尼。输出端的LC滤波器可以避免系统与外部网络发生谐振,Rf、Lf和Cf分别为逆变器的滤波电阻、电感和电容;Rc和Lc分别为线路电感和电阻;Rg和Lg分别为网侧电感和电阻;il为滤波前的电感电流;io为逆变器输出电流;vo为逆变器输出电压;vo∗为功率环输出参考电压,并作为电压环输入参考电压;il∗为电压环输出参考电流与电流环输入参考电流;vi∗为电流环输出控制信号即PWM控制信号。分布式电源都是通过逆变器接入到微电网中,当微电网系统中出现多个微源逆变器时,便形成多逆变器并联运行的情况。当某台逆变器出现故障时,故障机自动退出供电系统,剩余的逆变器仍可持续给负载供电,以此提高微电网供电的可靠性和稳定性。
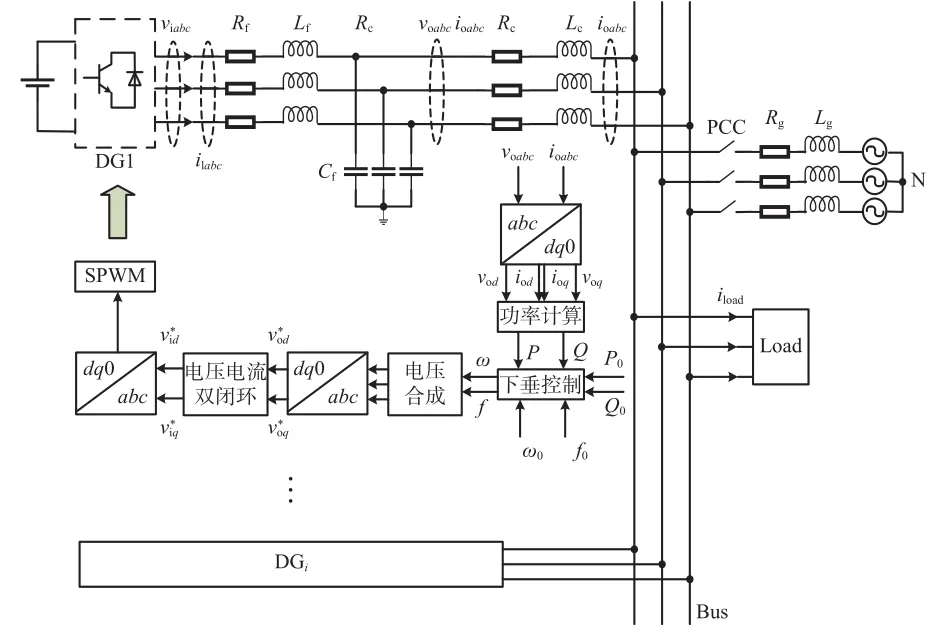
图1 多逆变器并联结构图
2 多逆变器并联小信号模型
本文首先对功率外环控制器、电压电流双闭环、输出LC滤波器,线路阻抗、负载以及网络结构单独进行建模分析,之后将各部分结合对整个系统进行小信号建模。选取其中一台逆变器的坐标系作为公共参考系,其他逆变器建模后进行坐标变换后转换到公共参考系,如式(1)所示。
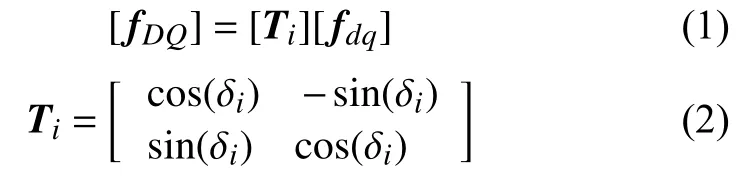
δi为逆变器i轴与公共参考系DQ之 间的夹角,公共参考坐标变换如图2所示。
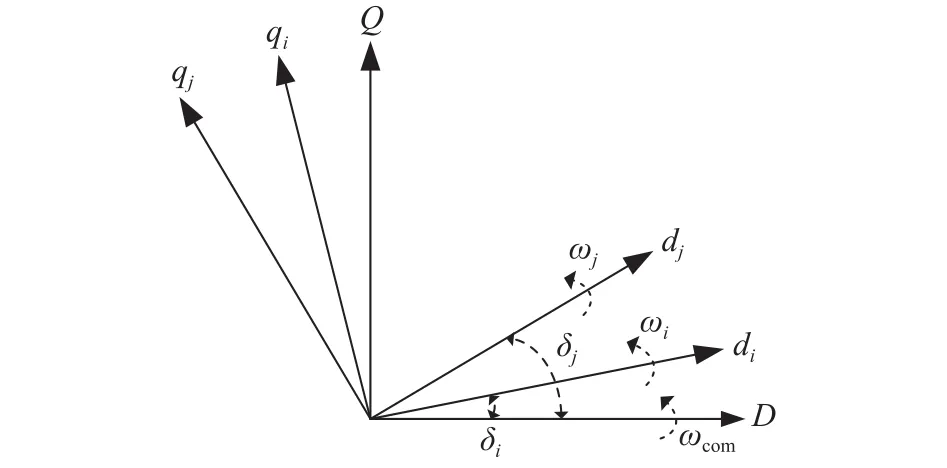
图2 参考系坐标变换图
2.1 功率环小信号模型
本文采用的功率环结构如图3所示。
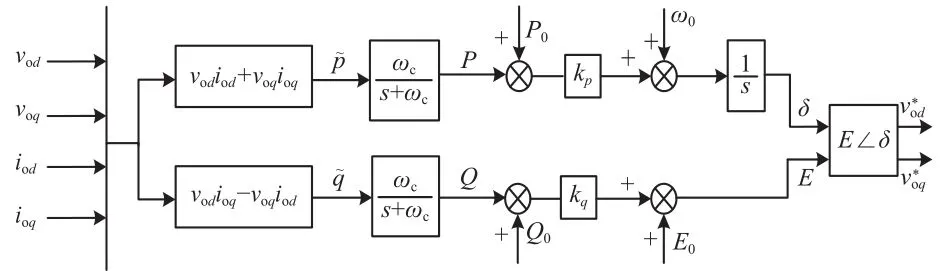
图3 功率控制器结构图
系统中逆变器侧输出电压vo与 输出电流io经过dq变换作为功率环输入的电压与电流分别为vod、voq、iod、ioq,计算得到瞬时有功功率与无功功率。瞬时功率通过一阶低通滤波器,求出基本分量对应的有功功率P和无功功率Q。

其中,ωc为一阶低通滤波器的截止频率。
根据图2的参考坐标系变换,可以得出并联系统的另一个逆变器相对于公共参考系DQ间的夹角为:

其中,ωcom为公共参考系DQ坐标系下的参考角频率。

在并联系统中,本文采用的下垂控制表达式如下式所示。

式中:ω——下垂频率;
ω0——给定频率;
E——输出电压;
E0——输出电压参考值;
kp——有功下垂系数;
kq——无功下垂系数;
P、Q——系统实际输出的有功功率和无功功率;
P0、Q0——有功功率和无功功率的参考值。
由有功-频率、无功-电压下垂控制表达式可得功率控制器提供的d轴输入参考电压、并将q轴参考电压设置为零,即:

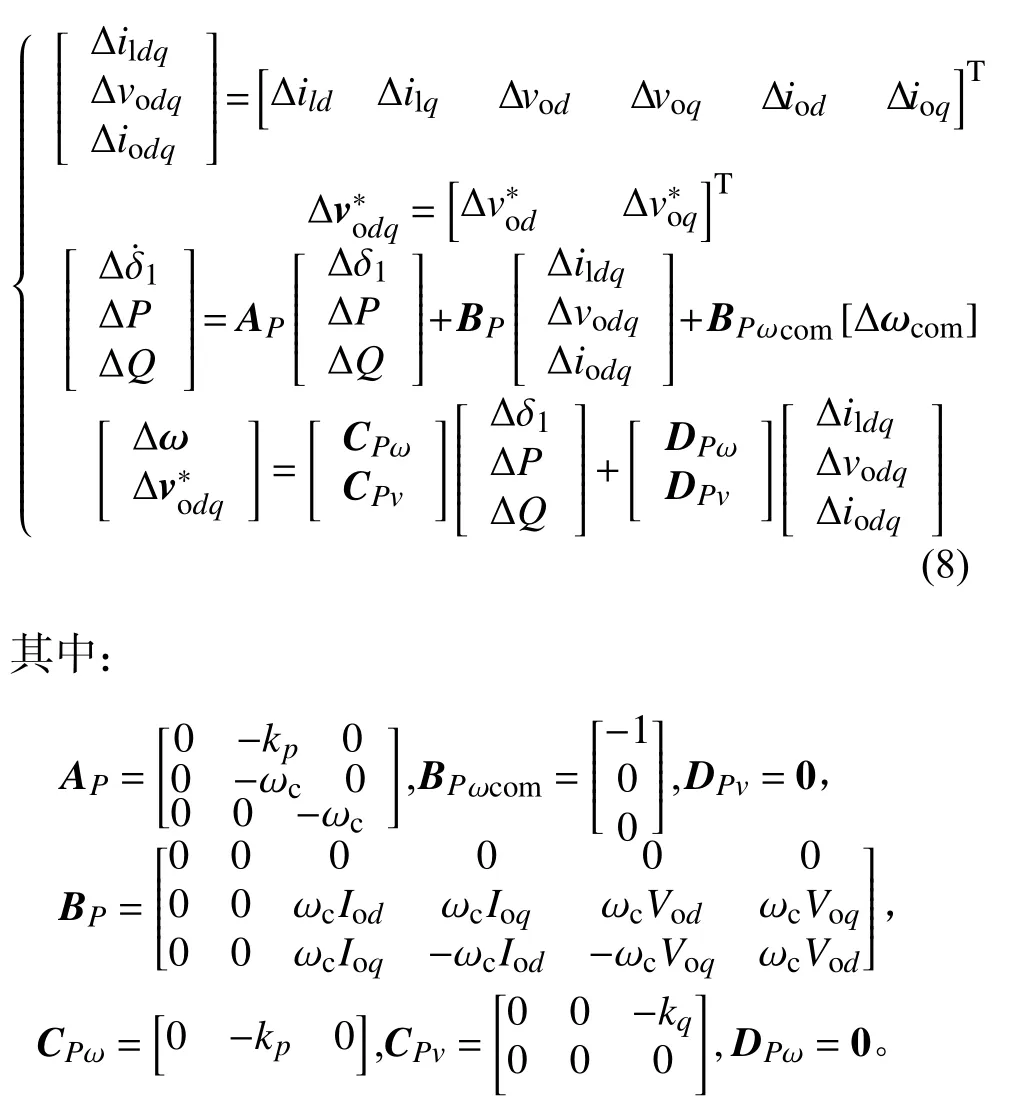
设 δ1为稳态时公共参考系DQ与 逆变器dq坐标系的相位差,将式(3)、(4)、(6)、(7)联立并线性化可得功率环小信号状态空间模型如下式所示。
2.2 电压电流环小信号模型
电压环结构如图4所示,包括所有反馈项和前馈项,PI控制器控制输出电压。
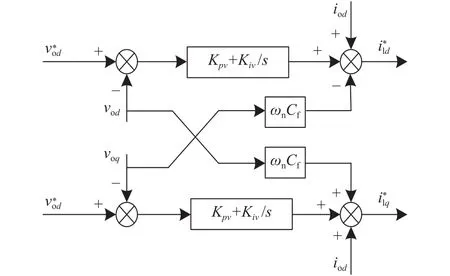
图4 电压环结构图
其状态方程为:

代数方程为:

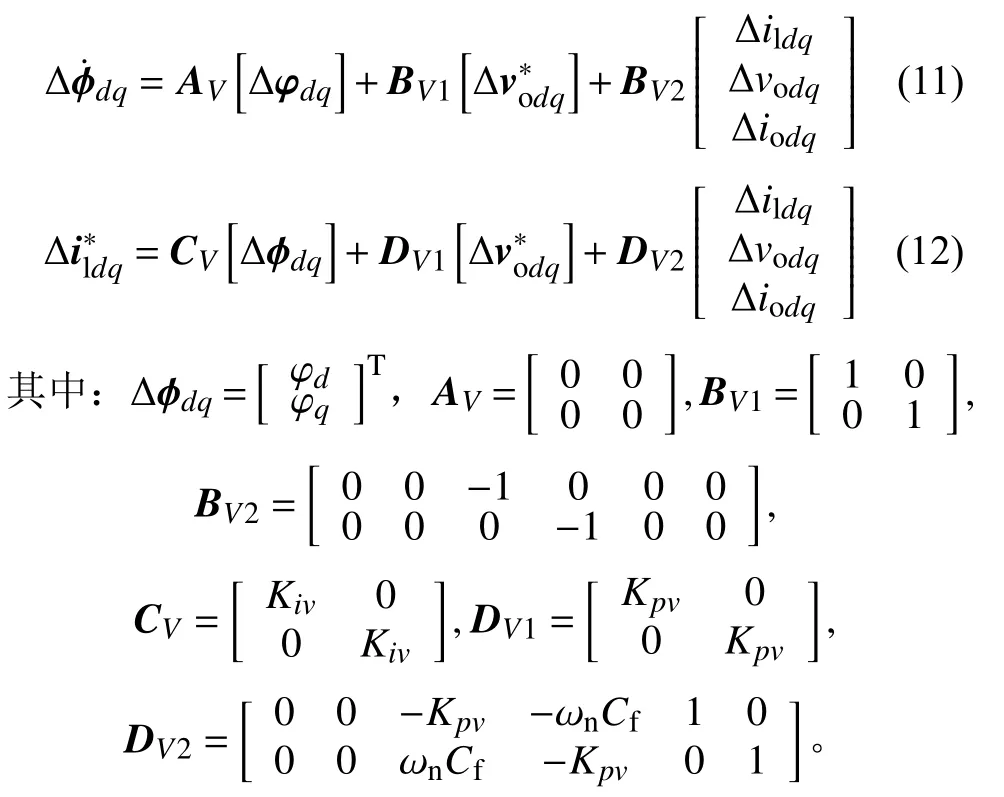
线性化后可得电压环小信号状态空间模型:
电流环结构如图5所示,包括所有反馈项和前馈项,PI控制器控制滤波器电感电流。
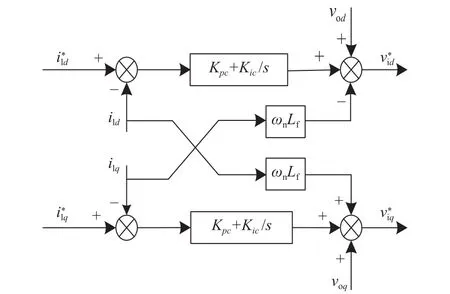
图5 电流环结构图
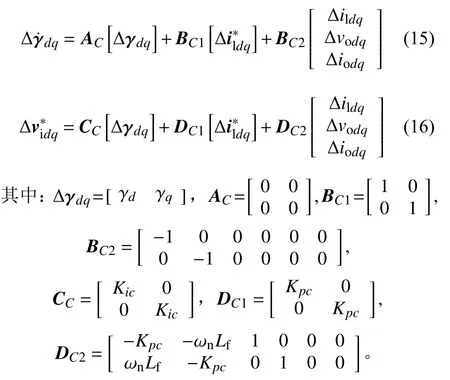
其状态方程为:

代数方程为:

线性化后可得电压环小信号状态空间模型:
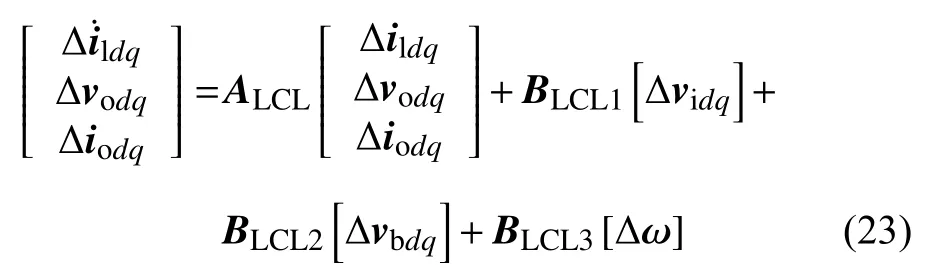
2.3 输出LC滤波器及线路阻抗小信号模型

式中:Rf、Lf和Cf——逆变器的滤波电阻、电感和电容;
Rc和Lc——线路电感和电阻。
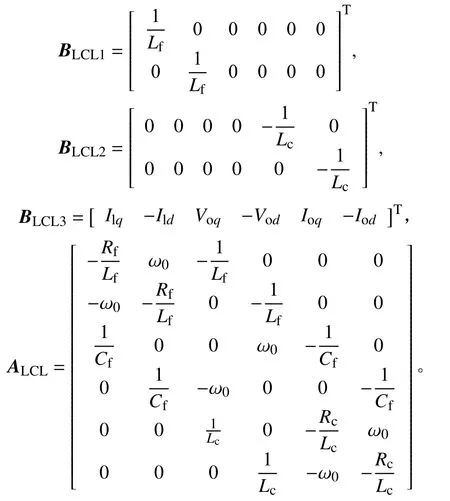
线性化可得到LC滤波器及并网线路阻抗小信号模型如式(23):
其中:
2.4 单个逆变器小信号完整模型
设母线电压vgDQ与igDQ是公共参考坐标系DQ下的变量,则:
线性化可得小信号模型如式(26)、(27):
式(27)中,VbD、VbQ、δ1为vbd、vbq、δ的稳态值。结合功率控制器、电压环、电流环、LC滤波器以及并网输电线路阻抗状态空间模型,可得到一个包含13个系统状态变量的逆变器完整的小信号模型:
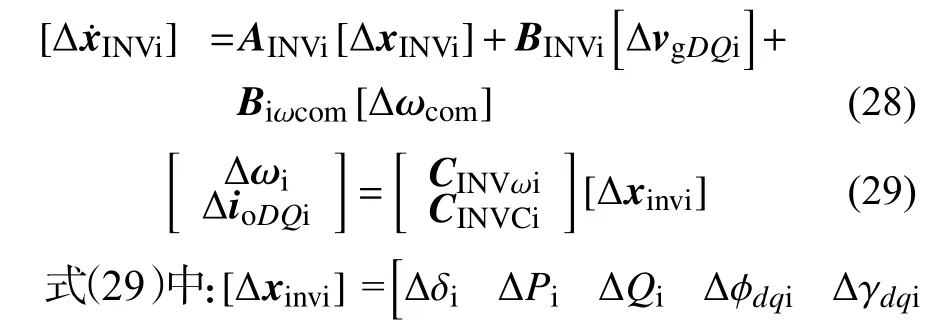

2.5 并联逆变器小信号模型
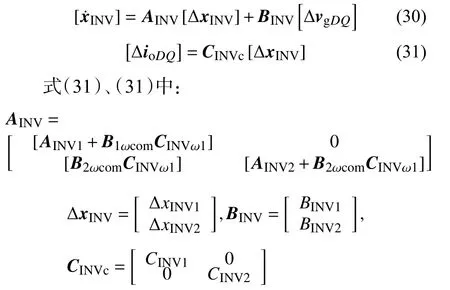
选取第一台逆变器的dq坐标系为公共参考系,两台逆变器并联的小信号模型如式(30)、(31):
2.5.1 负荷小信号模型
本文负载类型为RL型负载,对应的状态方程为:
线性化后得到负载小信号状态空间模型:
2.5.2 母线小信号模型
设母线电压幅值、频率恒定,母线与公共坐标系DQ的相位差为 δ2,则母线状态方程为:
线性化后得到母线小信号状态空间模型为:

2.5.3 网络小信号模型
将电网电压与母线电压列写KVL方程得:

线性化后得到小信号状态空间模型为:

2.6 完整的微电网小信号模型
联立式(30)、(36)、(37)、(42)得完整的微电网小信号模型为:

在式(43)中:

3 改进的下垂控制小信号模型
本文在功率外环中引入新的下垂控制式,以抑制电网电压波动和提高下垂控制精度;在电压电流双闭环中引入虚拟复阻抗,使每个逆变器之间的线路阻抗匹配,以缩小功率均分误差。
3.1 改进下垂控制下的小信号模型
传统下垂控制方法在电网电压幅值的波动和频率的不稳定会严重影响功率均分,对系统造成振荡的问题。对传统下垂控制方程引入比例项,使提出的母线电压可以得到较快的响应速度。改进后的下垂控制方程如式(44)所示:

则式(9)中新的功率环小信号模型如下:

相较于传统下垂控制功率环如图3所示,改进后的功率环控制框图如图6所示。

图6 新的下垂控制结构图
其中,kpω为有功下垂比例系数,kqv为无功下垂比例系数。
3.2 虚拟复阻抗小信号模型
传统下垂控制线路阻抗不匹配会导致有功功率和无功功率的耦合,影响系统的稳定性。为消除这一问题,提出引入虚拟复阻抗的方法,如图7所示。
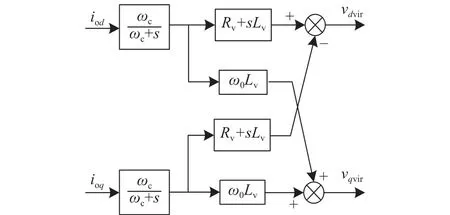
图7 虚拟阻抗控制结构图
改进虚拟复阻抗的状态方程如下:

线性化后得到虚拟复阻抗的小信号状态空间模型为:


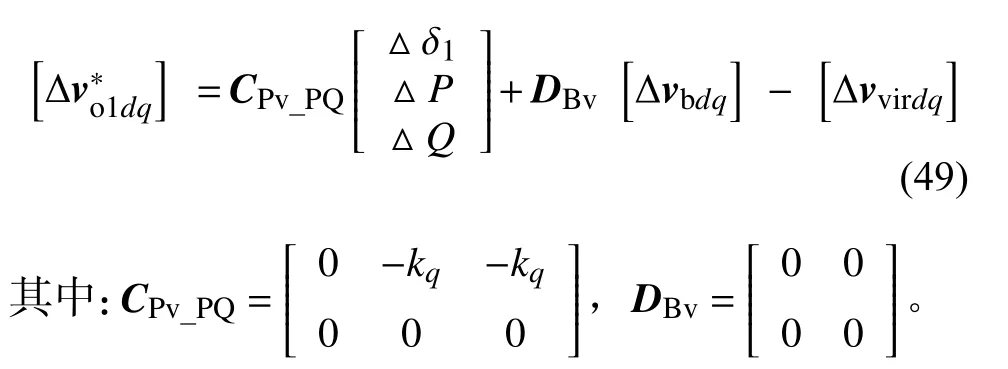
引入虚拟复阻抗后,得到新的逆变器输出参考电压为:

联立式(8)和式(48)得新的逆变器输出参考电压的小信号状态空间模型为:
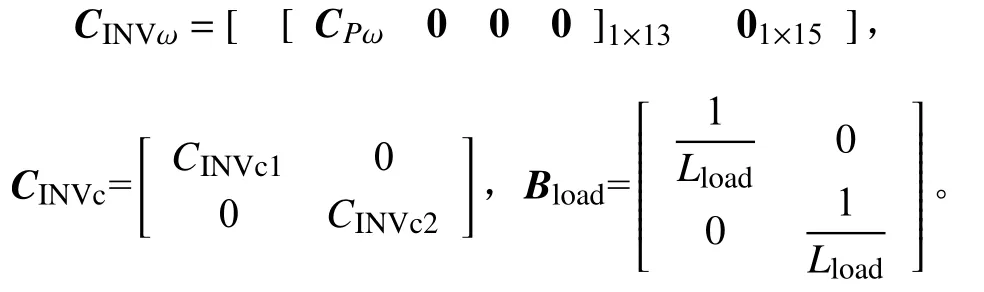
因此,可得到一个在公共坐标系DQ下的一个逆变器完整的小信号模型:
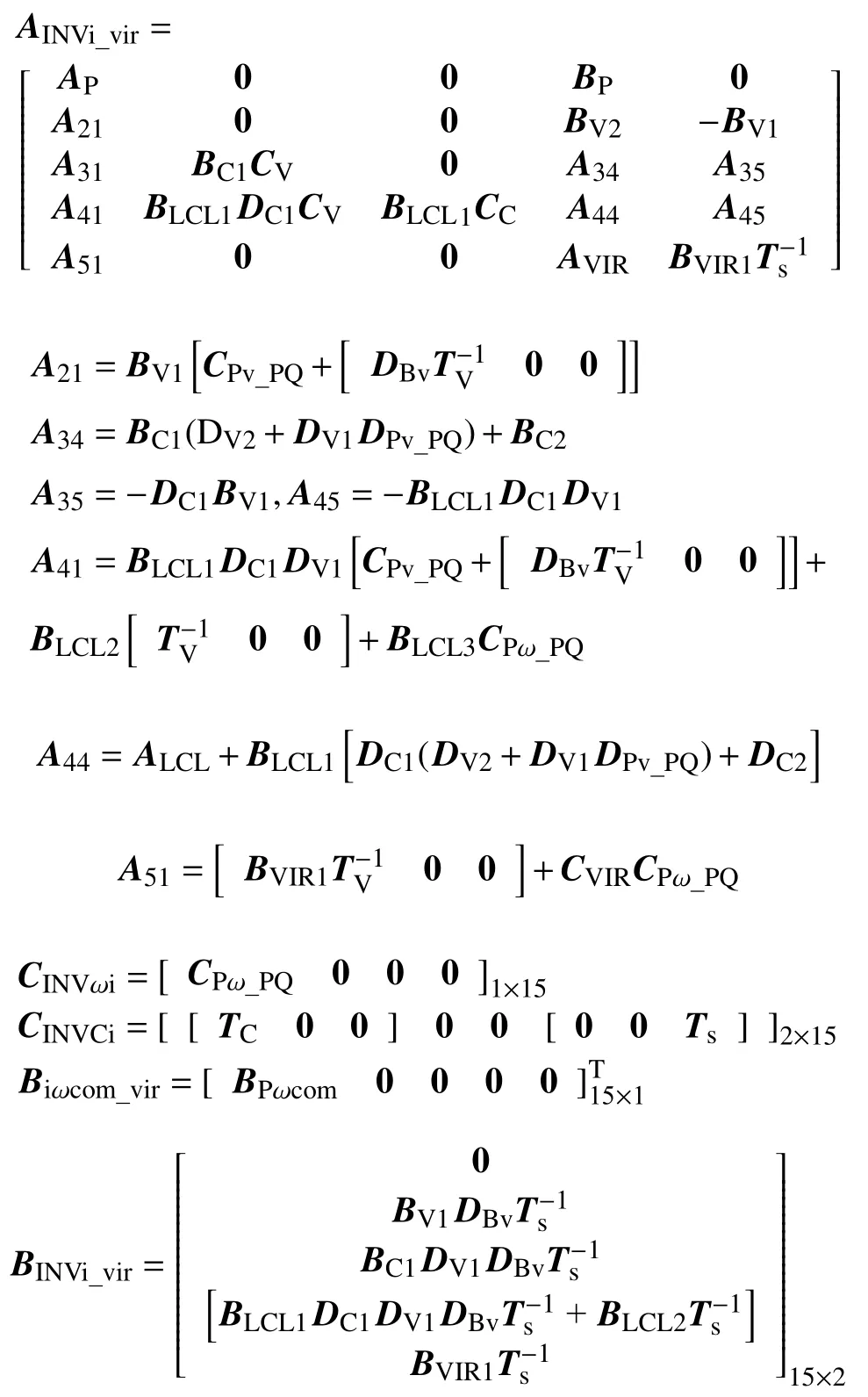
保持其他子模块的小信号模型不变,引入虚拟复阻抗后完整的微电网小信号模型为:

4 特征值稳定性分析
特征值是系统线性化状态空间矩阵特征方程的解,反映系统中不同的频率分量系统及其可用阻尼[15]。
4.1 敏感性分析
通过观察不同的状态变量在特征值下的参与情况可以了解不同频率分量的来源,对系统状态矩阵进行灵敏度分析,敏感性因子由式(50)得到:

式中:pki——敏感性因子;
λi——特征值;
akk——系统状态矩阵的对角元素。
通过第2、3节分别推导出传统下垂控制方法以及引入虚拟复阻抗时基于并网模式两台逆变器并联的完整小信号模型。随着并联逆变器的数量增加,系统矩阵Asys的阶数也会增加。在本节,将会重点分析已推导出的两台并联逆变器系统的稳定性分析及参数配置,系统稳态运行参数如表1所示。

表1 系统运行参数
初始条件下系统的全部特征值如图8所示,其范围可以分为三个不同的簇,簇“3”中的高频域共轭特征值对逆变器中LC滤波器组的状态变量和线路电流是敏感;簇“2”中的中频域共轭特征值对电流环和电压环的状态变量敏感;簇“1”中的低频域共轭特征值对功率环的状态变量敏感。
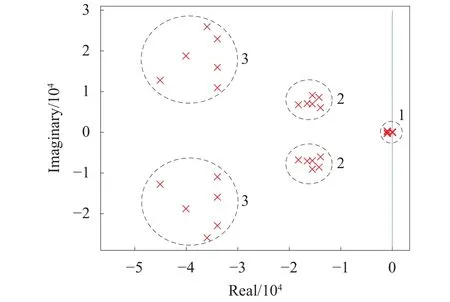
图8 各种模态的系统特征值图
4.2 稳定性分析
4.2.1 有功下垂系数对系统稳定性影响分析
kq=3×10-4,kp从 0.5×10-5增加到 7.5×10-5的系统根轨迹如图9所示,随着低频模式下有功下垂系数的增加,当kp=4.4×10-5时,经典下垂控制系统的特征根进入正实部平面,系统开始不稳定。引入虚拟复阻抗后的特征根均位于负实部平面,说明引入虚拟复阻抗控制后使系统稳定的有功下垂系数取值范围增大,系统阻尼增加,有利于消除系统振荡,提高系统稳定性。

图9 有功下垂系数根轨迹图
4.2.2 无功下垂系数对系统稳定性影响分析
kp=1×10-5,kp从 2.5×10-4增加到 6.5×10-4的系统根轨迹如图10所示,随着低频模式下无功下垂系数的增加,两种控制方法系统的特征根均位于正实部平面,系统稳定。引入虚拟复阻抗控制的特征根始终具有比经典下垂控制更大的实部绝对值,具有更大的阻尼比。
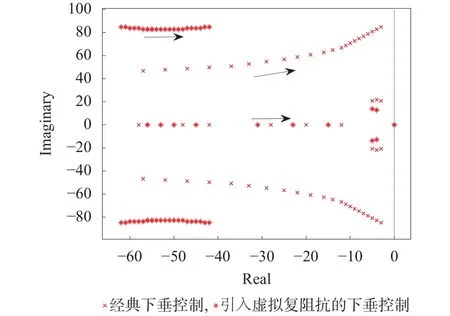
图10 无功下垂系数根轨迹图
4.3 仿真验证
在Matlab/Simulink仿真环境中建立拓扑结构搭建并网模式下两台逆变器并联模型,DG侧分布式电源采用直流电源(取值为800 V),滤波器采用LC滤波器,并在系统中引入新的下垂控制式和虚拟复阻抗,系统负载有功功率Pload为10 000 W;无功功率Qload为10 000 var。系统参数如表2所示。
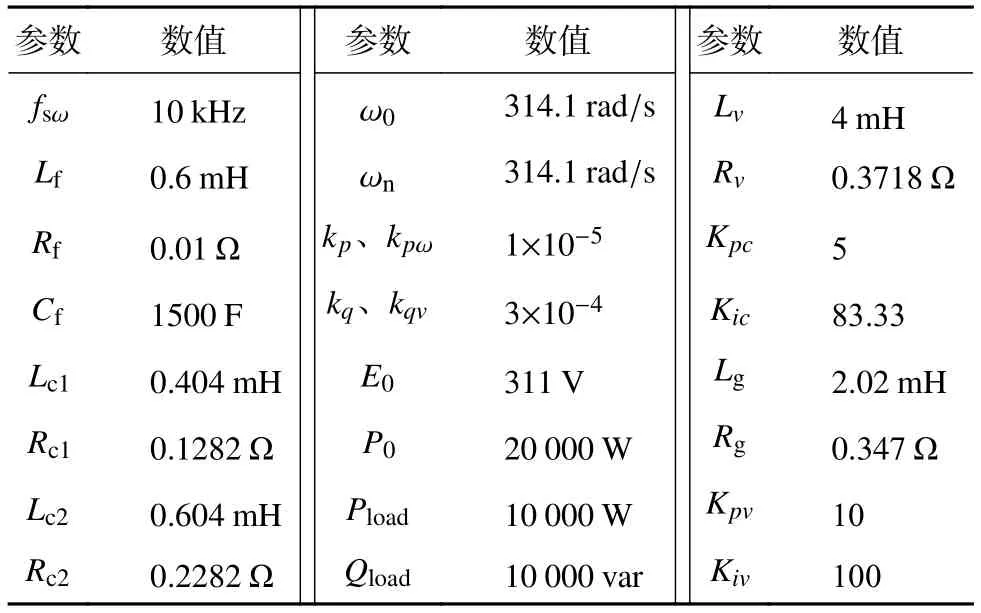
表2 系统参数
4.3.1 算例1
算例1:传统下垂控制与在传统下垂控制式中引入比例项后方法比较。
其中,图11(a)(b)为传统下垂控制下的有功功率均分效果及无功功率均分效果图。图12(a)(b)为在传统下垂控制式引入比例项后有功功率均分效果及无功功率均分效果图。
由图11可以得出,在线路阻抗不匹配的情况下,逆变器采用传统的下垂控制时,其输出的无功功率无法有效均分,由于逆变器输出的无功功率与逆变器的有功功率的微弱耦合,致使有功功率的均分精度同样出现均分效果严重下降。
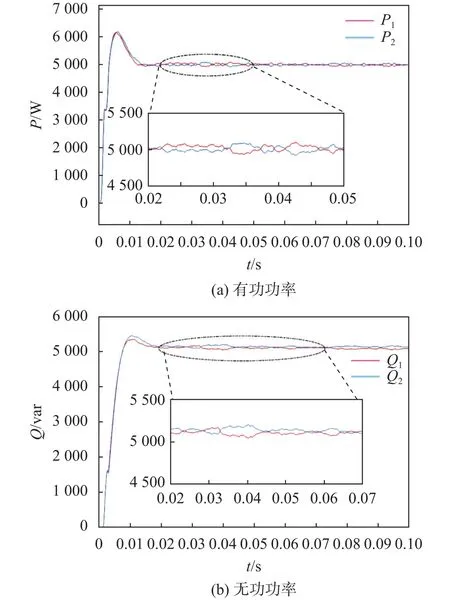
图11 传统下垂控制有功与无功的效果图
由图12可以得出,在文章中提出在传统下垂控制式中引入比例项后,逆变器输出的有功功率与无功功率均能有较好的均分。由此可以发现,文章提出的引入比例项改进后的下垂控制方法是有效的。
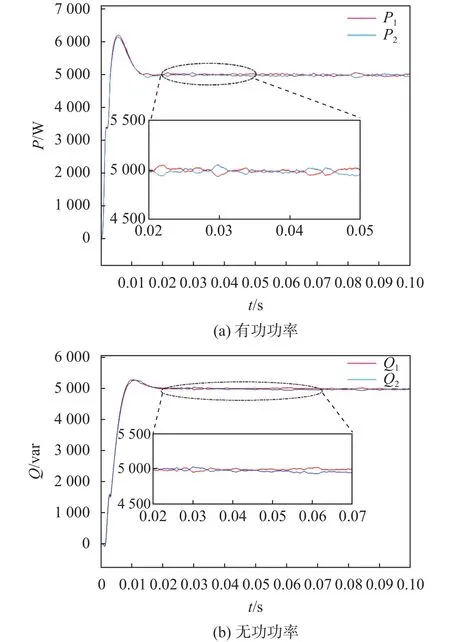
图12 引入比例项改进后的下垂控制的效果图
4.3.2 算例2
算例2:两线路阻抗不匹配时,将传统下垂控制方法与引入虚拟复阻抗的方法比较。其中,图13(a)(b)为引入虚拟复阻抗的有功功率均分效果及无功功率均分效果图。

图13 引入虚拟复阻抗的下垂控制的效果图
由图13可以得出,在文章中提出基于虚拟复阻抗的方法中,即使在线路阻抗不匹配的情况下,逆变器输出的有功功率与无功功率均能有较好的均分。由此可以发现,文章提出的虚拟复阻抗的方法是有效的。
5 结束语
针对传统下垂控制存在的有功、无功功率耦合的问题,本文提出改进下垂控制以及引入虚拟复阻抗的控制方法。文章建立了传统下垂控制、改进下垂控制以及引入虚拟复阻抗下垂控制的逆变器并联小信号模型。通过分析传统下垂控制和引入虚拟复阻抗下垂控制的系统特征根的分布,得到引入虚拟阻抗后系统阻尼比更大,有利于消除系统振荡,提高系统稳定性的结论。最后通过仿真实验支撑理论,为微电网多逆变器并联工程提供理论指导。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
烟草科技(2020年10期)2020-11-07
中等数学(2020年2期)2020-08-24
测控技术(2018年9期)2018-11-25
中学数学杂志(初中版)(2017年4期)2017-08-28
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22