基于V2V的车辆自动换道控制
2023-02-18 08:58祁子豪殷康超
汽车实用技术 2023年3期
祁子豪,殷康超
基于V2V的车辆自动换道控制
祁子豪,殷康超
(长安大学 汽车学院,陕西 西安 710064)
随着车路协同技术的发展,换道车辆可以与周围车辆进行数据信息的共享,提高换道效率和交通安全。基于以上分析,论文提出一种基于车车协同(V2V)的车辆自动换道控制方法,主要分为轨迹规划和轨迹跟踪两部分。选用基于时间的五次多项式作为换道轨迹,通过V2V获取的周围车辆信息进行轨迹路线规划,然后根据规划好的轨迹,采用滑模轨迹跟踪算法进行轨迹跟踪,实时优化车辆的车速和方向盘转角,从而完成换道。最后经CarSim- MATLAB/Simulink仿真证实,所提出的换道控制策略轨迹规划及跟踪合理有效,提高了换道安全性。
车路协同;V2V;轨迹规划;轨迹跟踪;滑模轨迹跟踪算法
近年来,汽车行驶过程中因换道发生的交通事故数不胜数,给交通带来了极大不便,因此,研发车辆自动换道技术迫在眉睫。LI 等提出车辆协同换道行为是相邻两个车道车辆的交叉换道行为,该研究设计了一个两阶段的框架来寻找较优的在线解决方案[1],但其要求在换道开始时刻两车道的所有车辆车速相同。冀杰等[2]将多约束模型预测控制算法应用于换道路径跟踪,大幅度提高了换道轨迹循迹的准确性和时效性,但其局限性是只考虑了换道时间、横向加速度等约束条件,并没有考虑换道车辆与其他车辆的安全距离以及换道车辆自身的纵向加速度等约束条件。李珣等为研究交通流模型中的局部交通规则,提出了一种考虑局部区域车辆状态优化的协同换道模型,并研究了一套协同换道规则[3]。LUO等考虑到目前的协同换道策略大多没有涉及到周围协同车辆的动态运动,所以提出了基于车车通信的动态自动换道控制策略[4]。一旦周围协同车辆发生动态变化,换道车辆可以立即进行规划重轨迹,保证换道车辆的安全行驶和换道效率。但其也仅仅只考虑了协同车辆在纵向上的速度突变,并没有同时考虑协同车辆的横向和纵向运动。目前大多数换道策略都存在仅凭换道起始时刻协同车辆位置就进行换道的问题,并且忽略换道过程中的车辆安全问题。
随着经济和技术的发展,智能网联汽车成为汽车发展的主要方向之一,融入汽车的高新技术也越来越多。在汽车网联化发展方面,车车协同(Vehicle to Vehicle, V2V)技术的发展逐渐成为主流。本文提出了一种基于V2V的车辆自动换道控制方法,用基于时间的五次多项式作为换道轨迹进行轨迹规划,用滑模轨迹跟踪算法进行轨迹跟踪,实时优化车辆的车速和方向盘转角,最终完成换道。在保证换道安全性的前提下,极大地提高了换道效率。
1 换道轨迹规划
因目标车辆在换道过程中可能会与其他车辆有协同行为,所以将换道细分为自由换道和协同换道[5],换道轨迹规划又细分为自由换道轨迹规划和协同换道轨迹规划。
1.1 自由换道轨迹规划
V2V可以在一定范围内有效地共享每辆车的位置、速度、加速度等信息。当换道车辆收到周围的车辆信息时,首先要进行的就是换道轨迹规划,本文采用基于时间的五次多项式来进行轨迹规划(纵向和横向都是基于时间的五次多项式),因为其换道曲线连续光滑,无突变,车辆舒适性好,五次多项式为
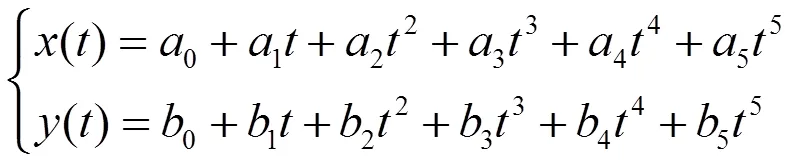
式中,0—5、0—5为未知系数;为换道时间。
结合换道起始时刻和结束时刻车辆在横向和纵向的位置、速度、加速度信息,建立12个表征汽车状态的方程,即
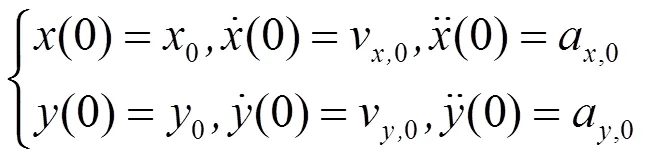
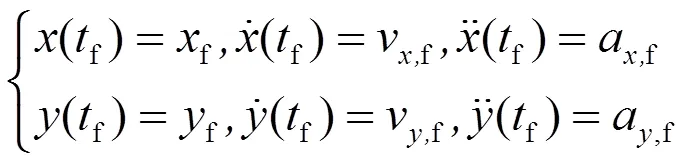
式中,0、0、v,0、v,0、a,0、a0为起始时刻横向和纵向的坐标、速度和加速度;f为结束时刻;f、f、v,f、v,f、a,f、a,f分别为结束时刻横向和纵向的坐标、速度和加速度。
式(2)、式(3)和式(1)联立,除了0—5、0—5,其余均为已知条件,因此,可直接解出系数0—5、0—5即为换道轨迹。
换道轨迹规划要满足一定的约束条件,本文主要考虑了位置约束、速度约束、动力学约束和安全约束。位置约束指换道车辆的横向位置应在本车道和目标车道的中心线之间;速度约束指换道车辆的速度应大于0,小于该车的最大车速;动力学约束指换道车辆的加速度和加加速度都应小于各自最大值;安全约束指换道车辆的外轮廓不与其他车辆外轮廓重合(不发生碰撞),即满足式(4):
(M-0)2+(M-0)2>(M+0)2(4)
式中,M、0为换道车辆和障碍车辆的纵向位移;M、0为换道车辆和障碍车辆的横向位移;M、0为换道车辆和障碍车辆的动态圆半径。
1.2 协同换道轨迹规划
协同换道是在自由换道的基础上,添加了与协同车辆的配合交互,保证在换道车辆换道过程中,协同车辆可以保持车速并且不换道,从而不干涉换道过程。具体方法:当换道车辆准备换道时,先选择目标车道的前方车辆和后方车辆;然后根据自身和协同车辆的位置、车速、加速度信息按照基于时间的五次多项式进行自由换道轨迹规划;之后发送规划轨迹信号给协同车辆,协同车辆收到信号后,同意协同则发送信号1,反之发送0;相应地,换道车辆如果收到反馈信号1,就进行轨迹跟踪,收到反馈信号0,进行轨迹重规划,重新发送规划轨迹信号给协同车辆。具体的协同换道轨迹规划策略如图1所示。
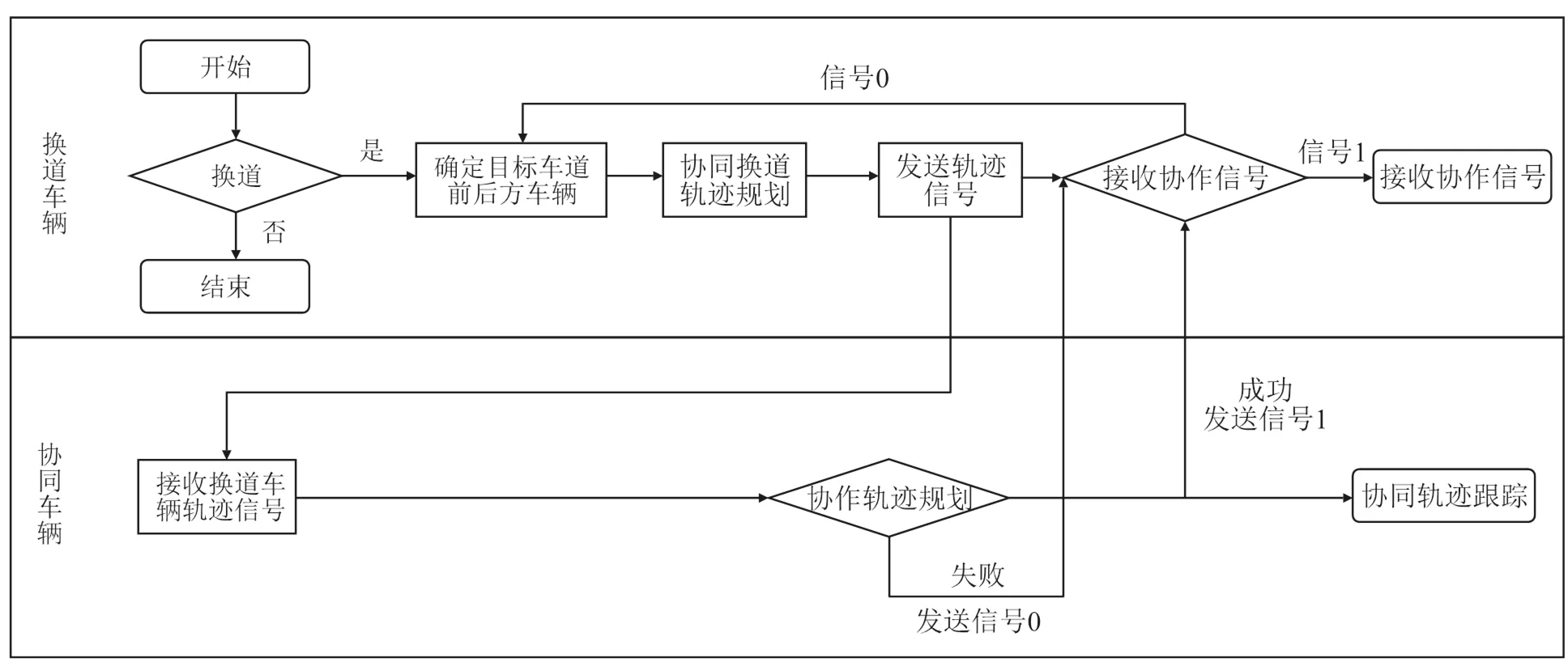
图1 协同换道轨迹规划策略图
协同换道的换道轨迹规划和换道约束应和自由换道相同。
2 换道轨迹跟踪
换道轨迹跟踪[6]是对规划好的路径进行跟踪,本文采用滑模轨迹跟踪算法[7]来跟踪换道轨迹。
车辆轨迹跟踪是在任意时刻通过控制输入(车速和横摆角速度)来确保车辆误差(横向误差、纵向误差和方向角误差)尽可能小。所以本文在backstepping方法的基础上,设计滑模控制器的切换函数为

式中,e、e、e分别为横向、纵向和方向角误差,r为当前时刻的速度。
式中,为常数向量;为正的无穷小量。
将等速趋近率[8]式(6)带入式(5)
可得
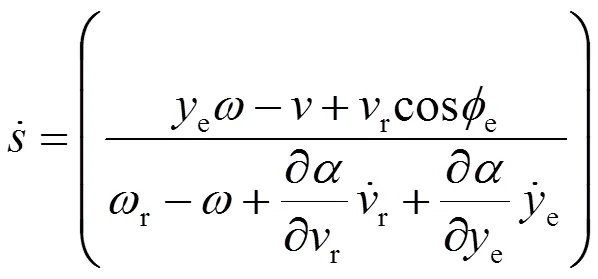
式中,=tan-1(re)。
由式(7)可得控制规律
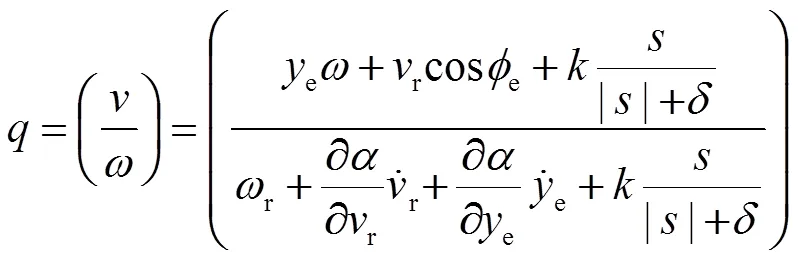
最后根据控制规律将期望的车速和横摆角速度转化为汽车扭矩和方向盘转角[9],保证车辆换道轨迹始终沿着规划好的路线进行。
式中,为车轮半径,为摩擦系数;为车辆质量;g是引力常数;D为空气阻力系数;为车辆的正面面积;为空气的密度;为车速;sw为方向盘角度;w为转向系统的角度传输率;为前轮的转向角;为轴距;和分别为车辆质心到前、后轴的距离;f和r为前轮和后轮的转弯刚度。
3 换道控制仿真
搭建CarSim-MATLAB/Simulink换道策略仿真模型如图2所示。仿真图主要由CarSim中搭建的汽车动力学模型和Simulink中搭建的滑模控制器组成。
图2 换道控制策略仿真图
在CarSim中设置了汽车的整车参数,如表1所示,同时将汽车的车轮转角作为输入量,将横向速度、纵向速度、横向位移、纵向位移、横摆角和横摆角速度作为输出量;在Simulink中添加由 CarSim S-Function构成的轨迹跟踪控制器模块,控制器的主要参数如表2所示,同时使用函数编写参考轨迹模块,之后将 CarSim中的车辆状态信息输出给控制器,控制器结合约束条件和目标函数求出下一刻的最优解信息,传递给 CarSim 来控制车辆行驶,实现控制策略的目标轨迹跟踪。
表1 整车参数表

表2 控制参数
图3为换道车辆加速向左换道,换道车辆起始车速为10 m/s,逐渐加速向左换道,车速最终加速到15 m/s;协同车辆车速保持不变,始终为15 m/s。图4为换道车辆减速向右换道,换道车辆起始车速为20 m/s,逐渐减速向右换道,车速最终减速到15 m/s;协同车辆车速保持不变,始终为15 m/s。
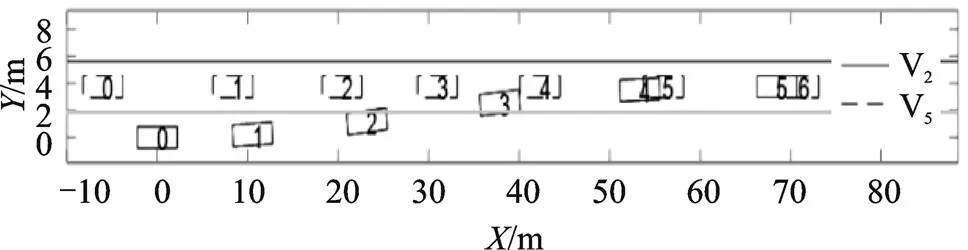
图3 向左加速换道仿真结果图
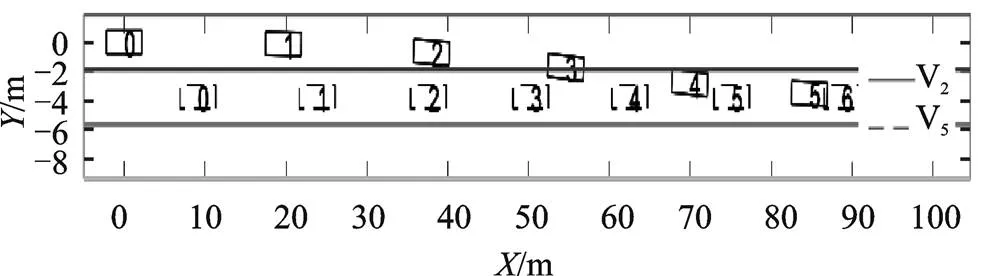
图4 向右减速换道仿真结果图
仿真结果显示,本文设计的换道轨迹规划和轨迹跟踪方法合理有效,换道车辆安全准确地完成了换道。
4 总结
本文将V2V获取的周围车辆信息与换道车辆共享,用基于时间的五次多项式进行换道轨迹规划,然后根据规划好的轨迹,采用滑模轨迹跟踪算法进行轨迹跟踪,完成换道。最后经CarSim- MATLAB/Simulink仿真验证,所提出的换道控制策略能够准确安全地完成换道。
[1] LI B,ZHANG Y,FENG Y,et al.Balancing Computation Speed and Quality: A Decentralized Motion Planning Method for Cooperative Lane Changes of Connected and Automated Vehicles[J].IEEE Transactions on Intelligent Vehicles,2018,3(3):340-350.
[2] 冀杰,唐志荣,吴明阳,等.面向车道变换的路径规划及模型预测轨迹跟踪[J].中国公路学报,2018,31(4): 172-179.
[3] 李珣,曲仕茹,夏余.车路协同环境下多车道车辆的协同换道规则[J].中国公路学报,2014,27(8):97-104.
[4] LUO Y,XIANG Y,CAO K,et al.A Dynamic Automated Lane Change Maneuver Based on Vehicle-to-vehicle Communication[J].Transportation Research Part C: Emerging Technologies,2016,62:87-102.
[5] TREIBER M,HENNECKE A,HELBING D.Congested Traffic States in Empirical Observations and Micros- copic Simulations[J].Physical Review E,2000,62(2): 1805.
[6] 郭烈,张荣辉,葛平淑,等.双闭环结构的智能车辆弯路换道轨迹跟踪控制[J].汽车工程学报,2014,4(4): 245-252.
[7] KATO S, TSUGAWA S, TOKUDA K, et al. Vehicle Control Algorithms for Cooperative Driving with Automated Vehicles and Intervehicle Communications [J].IEEE Transactions on Intelligent Transportation Systems,2002,3(3):155-161.
[8] 冀杰,李以农,郑玲,等.车辆自动驾驶系统纵向和横向运动综合控制[J].中国公路学报,2010,23(5):119-126.
[9] 向勇,罗禹贡,曹坤,等.基于车-车通信的自动换道控制[J].公路交通科技,2016, 33(3):120-126,145.
Vehicle Automatic Lane Change Control Based on V2V
QI Zihao, YIN Kangchao
( College of Automobile, Chang'an University, Xi'an 710064, China )
With the development of vehicle-road cooperation technology, lane changing vehicles can share data and information with surrounding vehicles to improve lane changing efficiency and traffic safety. Based on the above analysis, this paper proposes a vehicle automatic lane change control method based on vehicle to vehicle (V2V), which is mainly divided into two parts: trajectory planning and trajectory tracking. The quintic polynomial based on time is used as lane-changing trajectory, and the path planning is carried out through the surrounding vehicle information obtained by V2V. Then, according to the planned trajectory, the sliding mode trajectory tracking algorithm is used to track the vehicle speed and steering wheel angle, so as to complete lane change. Finally, the CarSim-MATLAB/Simulink simulation proves that the proposed lane change control strategy is reasonable and effective in trajectory planning and tracking, and improves the lane change security.
Vehicle-road cooperation; V2V; Trajectory planning; Trajectory tracking; Sliding mode trajectory tracking algorithm
U495
A
1671-7988(2023)03-44-05
10.16638/j.cnki.1671-7988.2023.03.008
祁子豪(1998—),男,硕士研究生,研究方向为智能网联车及无人驾驶,E-mail:2721148048@qq.com。
猜你喜欢
数学年刊A辑(中文版)(2020年1期)2020-05-19
中国惯性技术学报(2019年6期)2019-03-04
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
北京航空航天大学学报(2017年4期)2017-11-23
作文周刊·小学一年级版(2017年27期)2017-08-10
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
人生十六七(2015年6期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28