LKAS功能标定车辆状态排查与问题分析
2023-02-18 08:58汤传军
汽车实用技术 2023年3期
汤传军
LKAS功能标定车辆状态排查与问题分析
汤传军
(尼得科(苏州)有限公司,江苏 苏州 215129)
转向系统的车道保持辅助系统(LKAS)功能作为高级驾驶辅助系统(ADAS)功能的基础功能模块,对车辆的高级自动驾驶功能的实现有重要的意义。LKAS功能是实现车辆横向功能的基本功能需求,良好的车辆转向性能是保证良好的LKAS功能的基础,因此,在对车辆的LKAS功能进行标定前,有必要对车辆状态进行排查验收,对存在的不良现象进行问题分析,提供优化方案,确保车辆的基本性能可以满足LKAS功能标定的需求,进而满足ADAS功能要求的需求。
车道保持辅助系统功能;标定;状态排查;问题分析
高级辅助驾驶系统(Advanced Driving Assis- tance System, ADAS)主要通过安装在汽车上的距离传感器、图像感知传感器等设备来监测感知车辆周围的环境并收集数据。ADAS系统可以对静、动态物体进行识别、侦测与追踪,通过内部运算与分析,能有效增加汽车驾驶的舒适性与安全性,降低交通事故发生的可能性[1]。电动助力转向系统(Electric Power Steering System, EPS)作为车辆横向控制的主流产品,是横向控制功能实现的关键系统。EPS可以实现和ADAS相关的车道保持功能(Lane Keeping Assist System, LKAS)、车道偏离预警功能(Lane Departure Warning System, LDWS)、自动泊车功能(Auto Parking Assist, APA)以及自适应巡航功能(Adaptive Cruise Control, ACC)等。LKAS功能是保证实现车辆横向功能的基本功能需求,良好的车辆转向性能是保证良好的LKAS功能的基础,因此,在对车辆的LKAS功能进行标定前,有必要对车辆状态进行排查验收,对存在的不良现象进行问题分析,提供优化方案,确保车辆的基本性能可以满足LKAS功能标定的需求,进而满足ADAS功能要求。
1 LKAS功能概述
LKAS功能主要通过环境感知传感器识别本车相对于车道中央的位置,如果驾驶员无意间偏离车道,则应向驾驶员发出警告或通过自动转向干预使车辆重新回到车道内[2]。LKAS一般包括三项子功能:车道偏离预警、车道偏离预防(Lane Departure Prevention System, LDPS)和车道居中控制(Lane Centering Control, LCC)[3]。
LKAS功能的硬件架构主要有传感器、控制器和执行器。LKAS主要是依靠前视多功能摄像头进行车道线感知,除了视觉感知以外,LKAS还需要通过ECS获得车速信号,通过EPS获得方向盘转角、转矩信号。LKAS功能一般依靠视觉感知实现,LKAS控制器通常集中在前视多功能摄像头内,LKAS控制系统可以分为感知层、决策控制层和执行层三个部分,LKAS控制系统架构见图1。
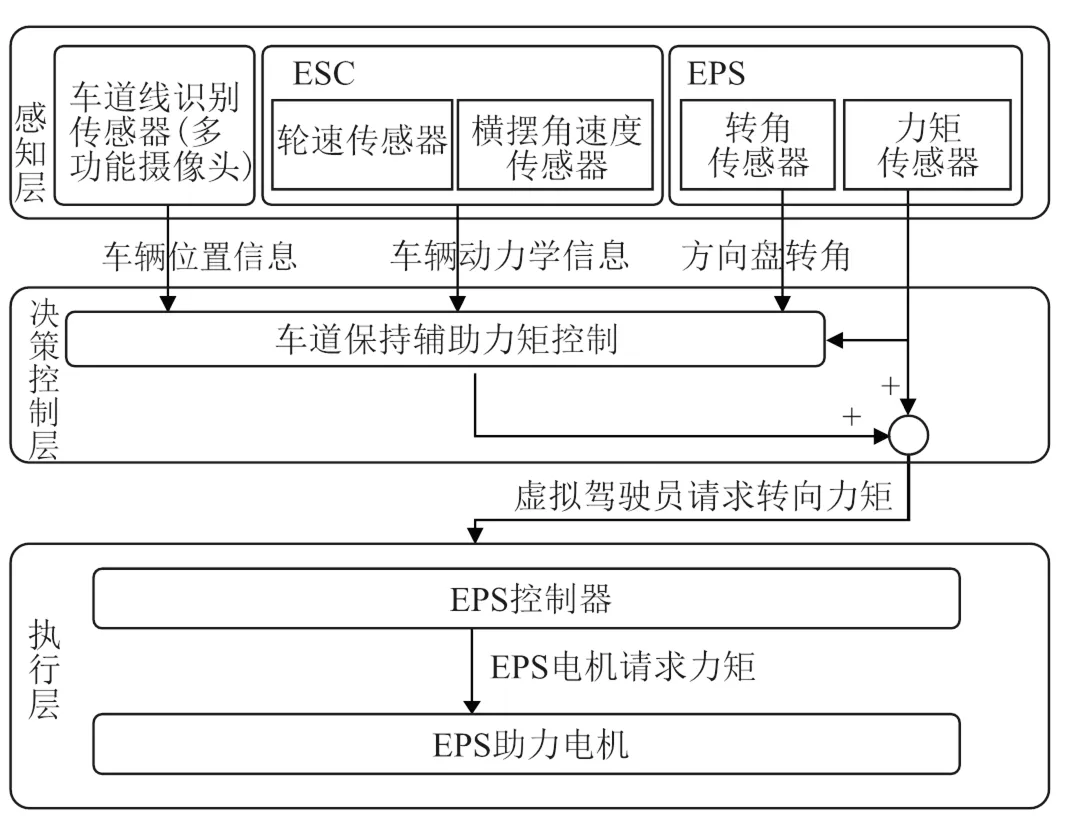
图1 LKAS控制系统架构图
感知层主要用于采集车道信息及车辆信息;决策控制层基于LKAS辅助力矩及真实驾驶员转向力矩生成虚拟驾驶员请求转向力矩;执行层主要为EPS系统,并采用虚拟驾驶员转向力矩替代了扭矩传感器检测到的驾驶员转向力矩。LKAS最主要的执行器是EPS转向器,通过EPS可实现车辆的横向运动控制及驾驶员手部的方向盘抖动预警。
2 LKAS标定车辆状态排查
2.1 LKAS标定车辆状态排查的目的
配备ADAS功能车辆的转向系统性能标定一般可以分为两部分:一是基础转向性能的标定,另一个是高级功能LKAS功能的标定。LKAS功能标定通常是在基础性能标定验收合格后,在基础软件上,通过标定LKAS上层的控制参数来实现符合功能要求的LKAS性能。
在实际标定过程中通常会存在由于车辆状态不合格或者基础转向性能变化导致车辆性能不能满足LKAS标定要求,因此有必要在对车辆LKAS性能标定前,对车辆基本状态进行验收、排查,为LKAS标定工作提前识别可能影响LKAS功能实现的潜在风险,排除故障,方便后期标定工作顺利进行。
2.2 LKAS标定车辆状态排查的流程
首先要对车辆的基本状态进行排查,包括车辆四轮定位参数、轮胎状态以及其他影响车辆安全行驶状态等。
(1)将车辆开到四轮定位仪上,检查车辆四轮定位参数是否符合要求,若不符合要求需重新做四轮定位,使其符合要求;
(2)检查车辆轮胎花纹、胎压等轮胎状态是否符合要求,若不符合要求需要更换新的轮胎或者给轮胎充气,使其符合要求;
(3)其他影响车辆安全行驶状态的检查,若存在影响安全性能的故障问题,必须排除故障,直到满足安全行驶状态,才可以进行标定工作。
与转向能力相关的LKAS调校车辆的关键状态排查:
(1)车辆直行能力排查。使车辆行驶在平直的沥青道路上,排查不同车速条件下车辆的直行能力,车辆直行能力应满足主机厂关于跑偏量的限制;
(2)车辆转向力水平排查:主要包括转向力水平和转向力左右一致性排查。车辆行驶在平直的沥青道路上,排查不同车速下的转向力大小和转向力左右一致性;
(3)LKAS功能打开,初始EPS软件维持车辆在车道中心线行驶的能力排查;
(4)LKAS功能打开,初始EPS软件在不同车速条件下控制车辆通过弯道的能力。
2.3 LKAS功能状态排查结果
LKAS功能状态排查存在问题如下:
(1)车轮升起时,缓慢操作方向盘,通过中点时存在力矩突变,手力突然变重;
(2)车辆左右力矩不对称;
(3)车辆直行时,车辆很难维持在车道中心线行驶;
(4)连续过弯时,方向盘存在连续摆动,且有时很难通过弯道。
3 LKAS标定车辆存在问题分析
问题1主要是由于0车速时增加了BWS控制引起的;问题2主要是由扭杆的力矩偏移和车辆状态不良造成的;问题3和问题4主要是由车辆左右力矩不对称引起的。
3.1 过中点时力矩突变问题分析
使车辆前轮悬空,断开转向器外拉杆与转向节连接处的球头连接,全行程打转向时,能容易感觉到回程轻,过中点的去程时能感觉到力矩变重,通过方向盘中点时存在力矩突变的现象,优化前转向力水平时序图和角力图如图2、图3所示。
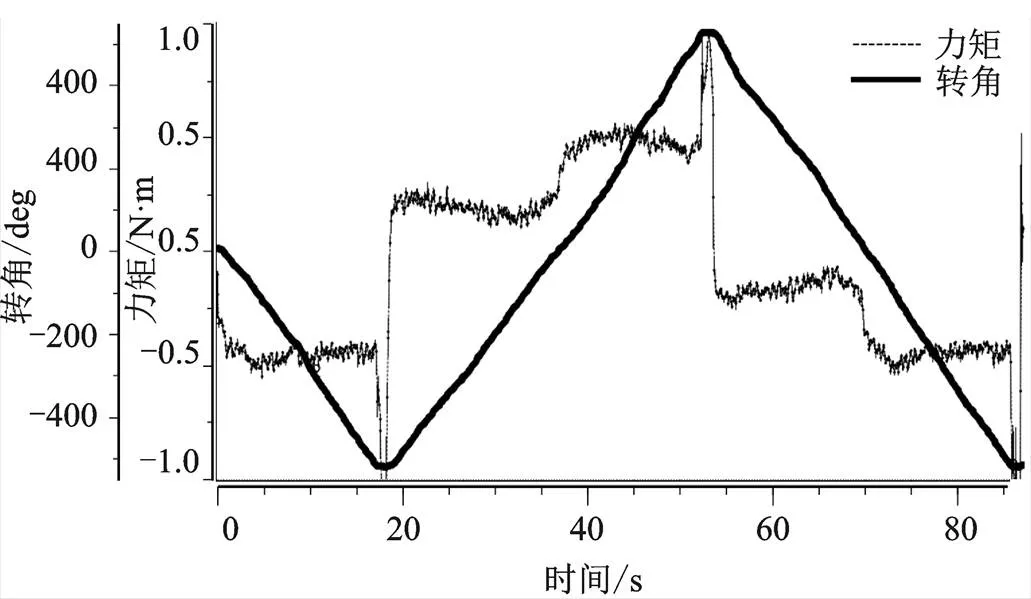
图2 优化前转向力水平时序图
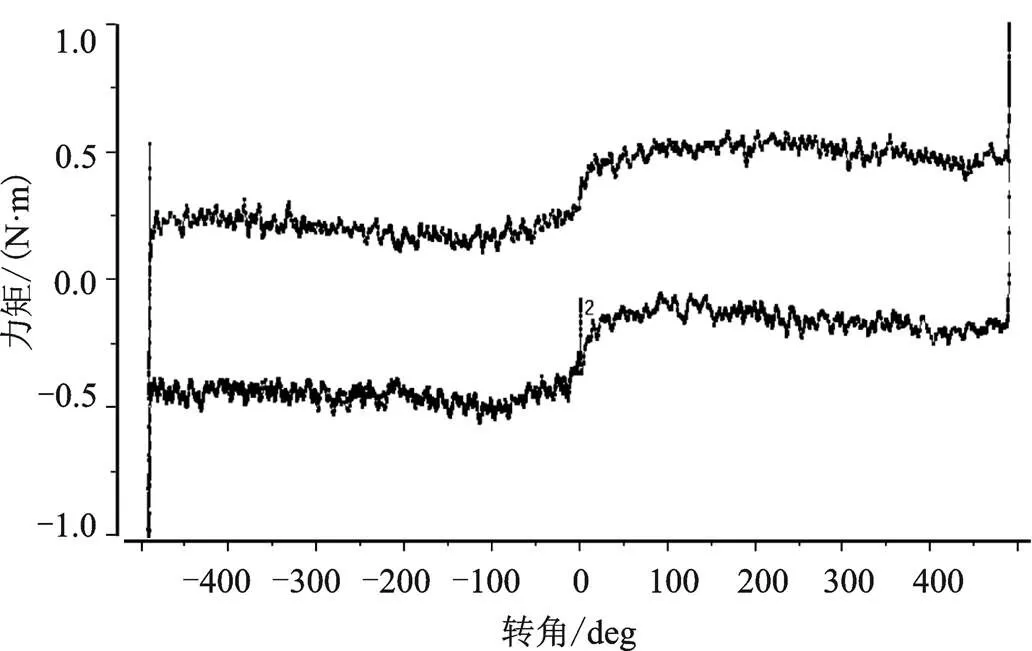
图3 优化前转向力水平角力图
分别对转向系统进行如下测试:
(1)IG ON, Engine off 工况下,不带EPS助力测试,由于摩擦力矩太大的影响,没有显示出力矩突变现象;
(2)IG ON, Engine on工况下,分别关闭ACR, BWS, DMP, FRIC, SAT功能,对系统的转向力水平进行评价和测试,最后发现关闭BWS时,方向盘通过中点力矩突变的现象消失。通过进一步查看软件参数,发现0车速下设置了BWS;关闭0车速下的BWS输出,在前轮悬空离地,断开转向外拉杆时的力矩突变现象消失,优化后的转向力水平时序图和角力图如图4、图5所示。
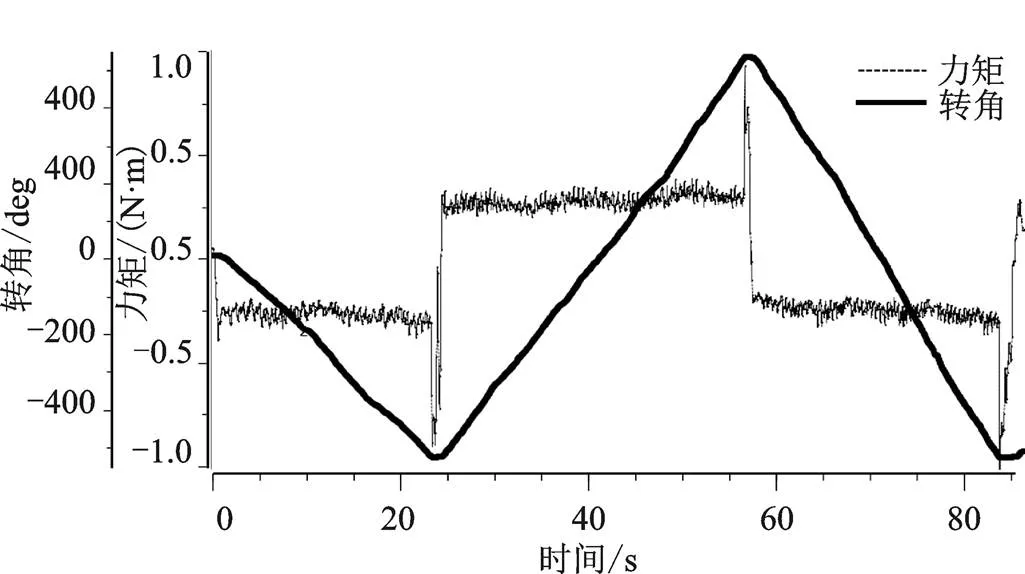
图4 优化后转向力水平时序图
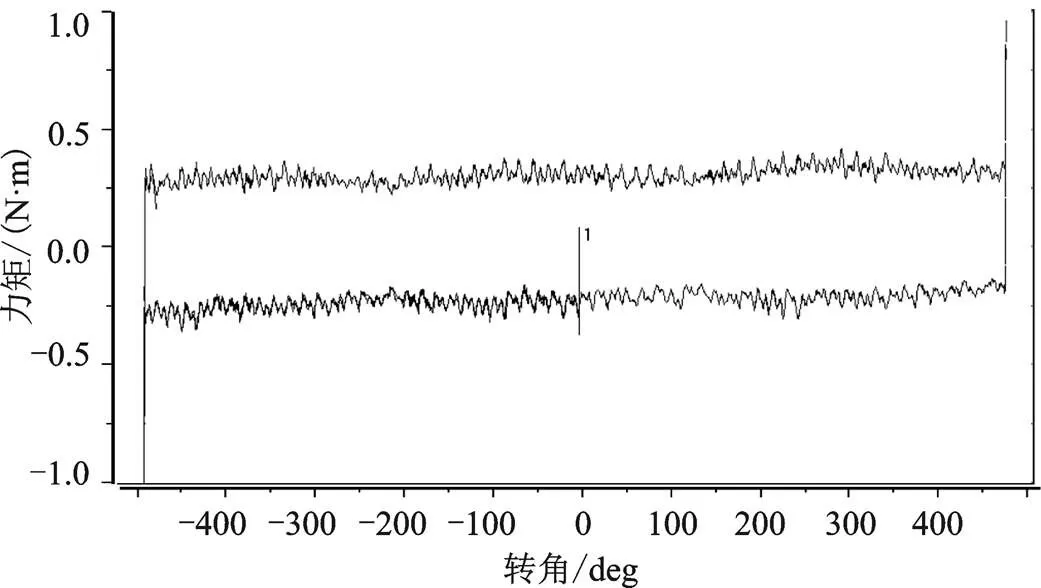
图5 优化后转向力水平角力图
3.2 车辆左右力矩不对称
标定车辆在原地转向工况下方向盘手力基本对称,随车速的增加,左右转向力矩差逐渐变大。
挑选一套性能参数良好,精度控制较好的转向器和转向管柱总成,对车辆转向系统进行零部件交叉排查。
左右力矩不对称问题排查程序及结果:
(1)检查车辆四轮地位参数,确定其在车辆设计标准范围内;
(2)更换转向系统总成,检查确认左右力矩不对称问题是否有改善,确认结果有明显的改善;
(3)单独更换转向器总成,检查确认左右力矩不对称问题是否有改善,确认结果没有明显改善;
(4)单独更换为性能参数较好的转向管柱总成,检查确认左右力矩不对称问题是否有改善,确认结果有明显改善。
通过对转向系统进行性能排查,初步断定为转向管柱对转向力矩性能的影响。
对更换管柱前后的标定车辆进行原地状态下中间位置的方向盘力矩偏移量测量,力矩偏移量测量测试结果如表1、表2所示。

表1 更换管柱前力矩偏移量测试结果

表2 更换管柱后力矩偏移量测试结果
通过多次试验测试,发现:更换管柱前,方向盘在中间位置的力矩偏移量为[0.05, 0.13] Nm,更换管柱后,方向盘在中间位置的力矩偏移量为[0.06, 0.08] Nm。转向力矩左右不一致问题可以基本确定为转向管柱的扭矩传感器标定偏移问题。
通过提高对转向系统供应商的扭矩传感器标定范围,将扭矩传感器下线监测的限定范围控制在0.1 Nm以下,改善该问题。
3.3 LKAS车道保持功能性问题
LKAS功能状态排查时存在的问题3和问题4,车辆直行时,车辆很难维持在车道中心线行驶和连续过弯时,方向盘存在连续摆动,且有时很难通过弯道,这两个问题主要是摄像头端LKAS控制算法的问题。
车辆直行的接受标准是车辆中心(黑点)在±0.2 m以内,目前存在的问题是,车辆中心与车道中心线的频移距离大于0.2 m,例如偏离车道中心线0.3 m,直行状态下,在车道线内不停的修订方向盘。车辆直行不居中问题示意图如图6所示。
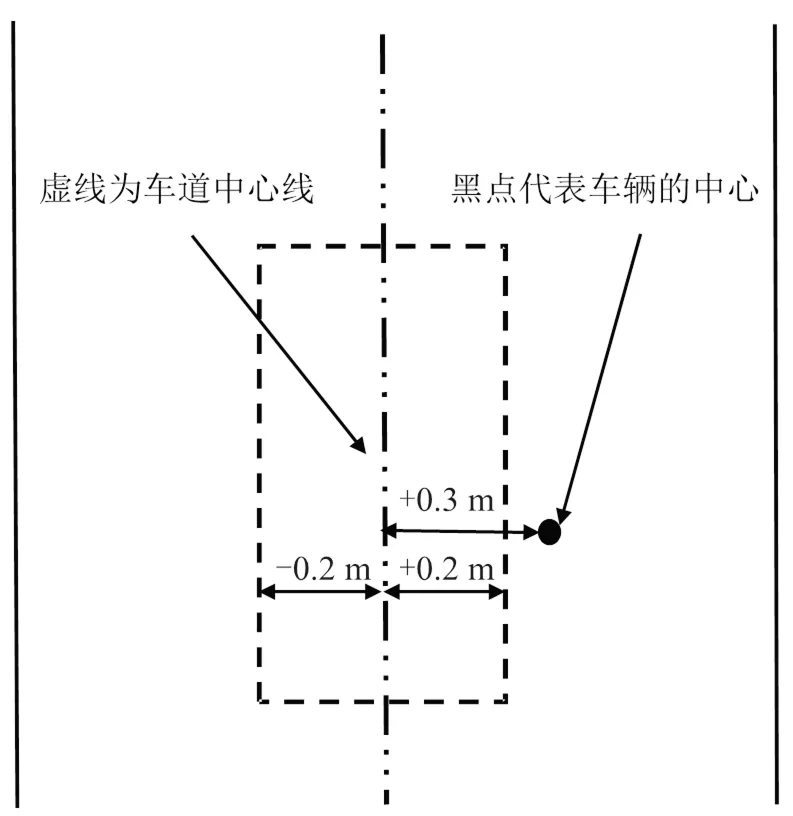
图6 车辆直行不居中问题示意图
车辆通过连续弯道时,当车辆与预瞄位置存在偏差,因系统响应延迟及方向盘转速过快,功能纠偏响应时产生超调,导致方向盘震荡,且无收敛趋势。车辆通过连续弯道时出现方向盘振荡如图7所示。
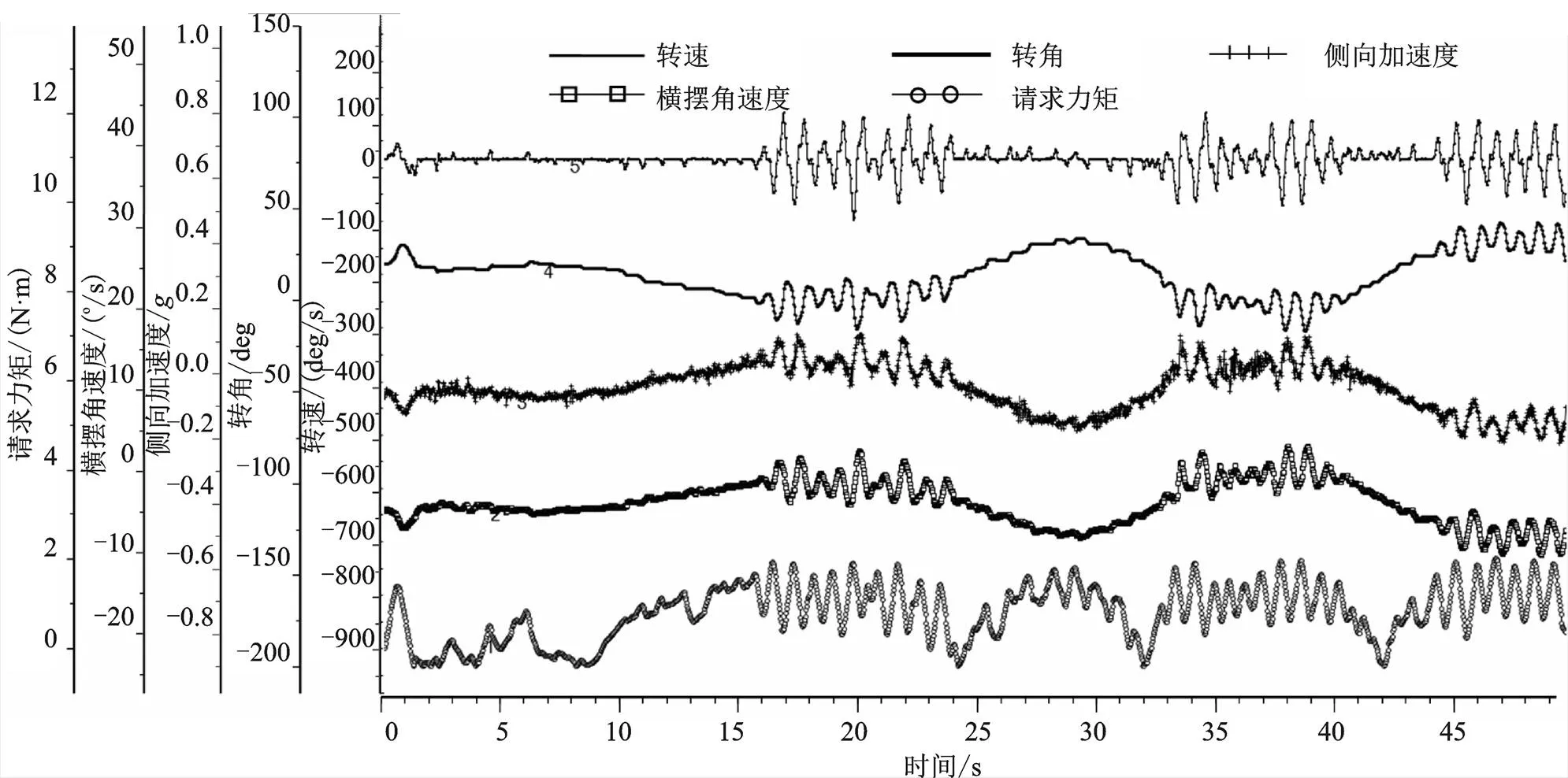
图7 车辆通过连续弯道时方向盘振荡
针对直线行驶时的车道居中性问题,可通过加大对应转角偏差的反馈力矩控制,但此改变会加重弯道方向盘振荡问题;针对通过连续弯道时方向盘振荡的问题,可通过减小对应转角偏差下的反馈力矩,降低超调量,但此修改会导致直线不居中性明显。以上两种问题优化存在矛盾的问题,需要在实际调校优化工程中,多次调校迭代,选择最优的参数,并尝试增加新的控制功能,来实现良好的LKAS车道保持功能。
4 LKAS车辆标定优化对策
在对LKAS 功能进行标定前,首先需要对车辆的转向性能进行开环调校,确定不同速度段下转向扭矩相对于车速的增益系数。60 km/h时,不同力矩增益系数的表现如表3所示。根据不同力矩增益系数下的车辆表现,最终确定60 km/h时的力矩增益系数0.88。
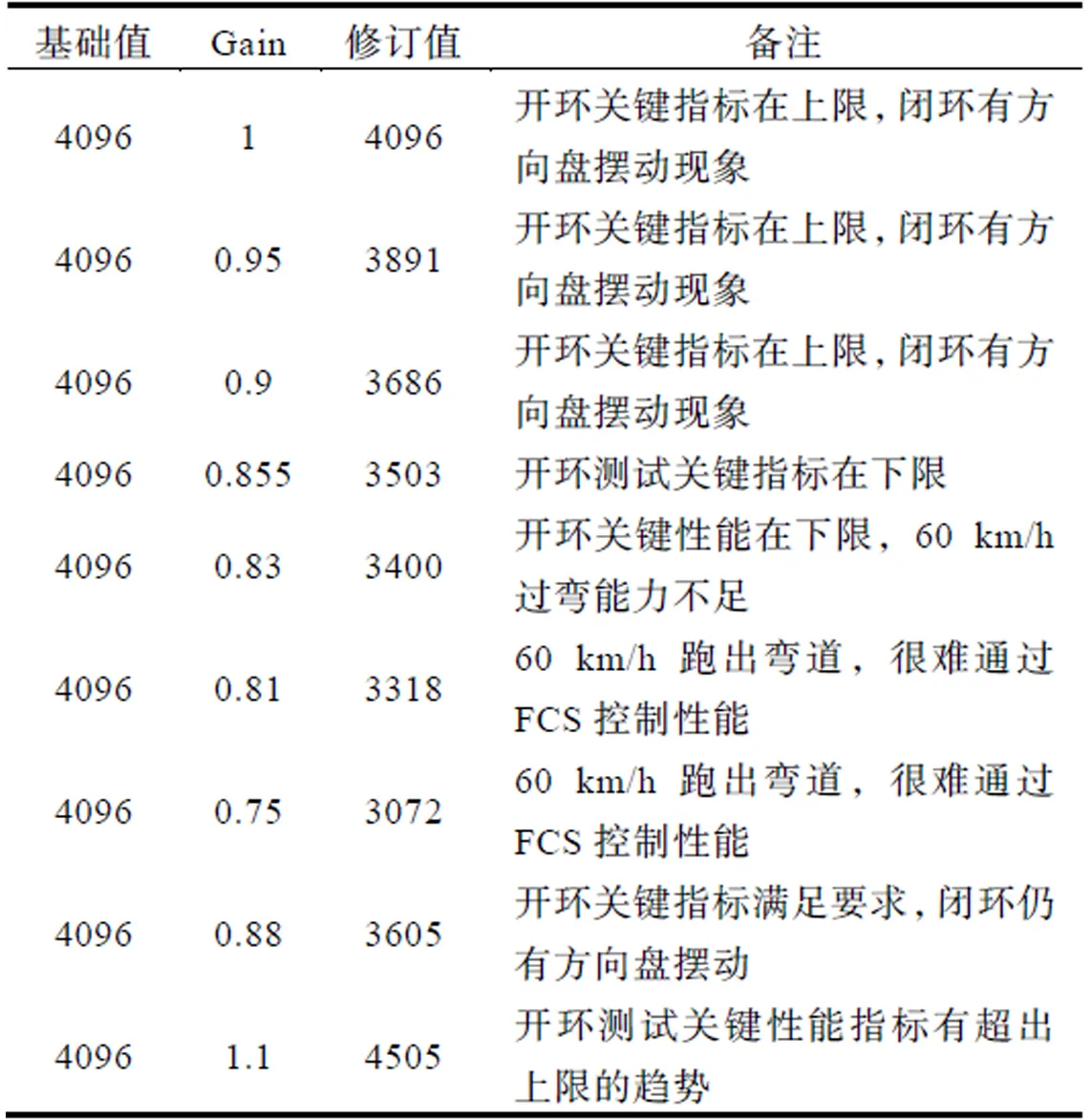
表3 不同力矩增益系数的表现(60 km/h)
综合考虑车辆性能表现和功能安全法规的要求,基于60 km/h时的基础力矩Gain值,确定 20 km/h,40 km/h,80 km/h,100 km/h,120 km/h,140 km/h车速下的基础Gain值,如表4所示。
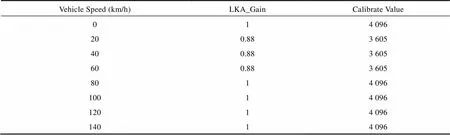
表4 不同车速下的力矩增益值
4.1 直行居中性能优化
车辆居中新能的优化可以通过以下对策进行优化:
(1)对车辆四轮参数进行控制,保证车辆的直行能力;
(2)对转向系统的机械摩擦进行摩擦补偿,减小转向系统的死区响应时间,提高转向系统对小扭矩的响应性;
(3)增加LCK(Lane Center Keeping)功能,通过增加居中请求扭矩,优化车辆的居中能力。
4.2 连续弯道方向盘超调振荡优化
LKAS控制器的控制逻辑框图如图8所示。
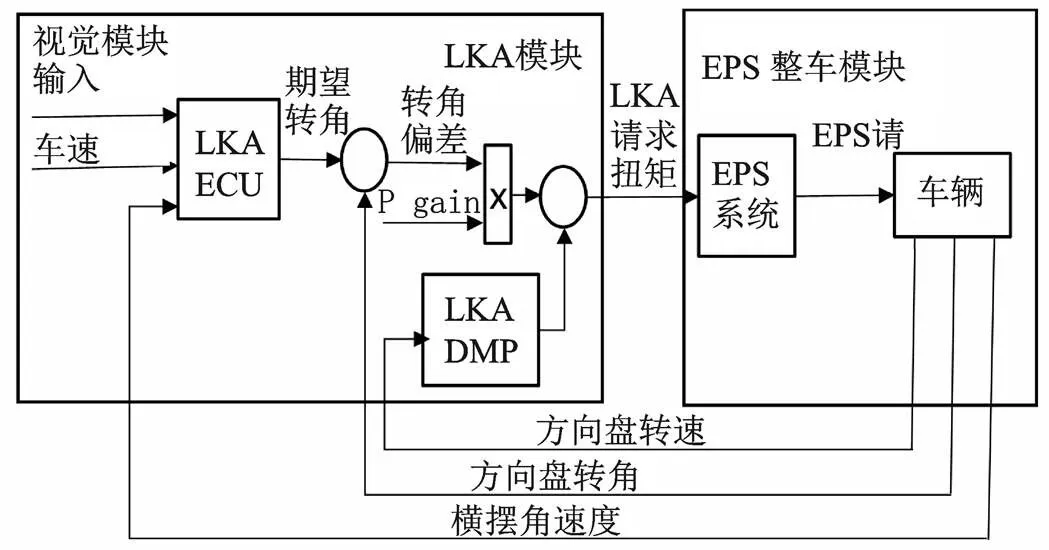
图8 车辆通过连续弯道时方向盘振荡
通过解析LKAS控制器的控制逻辑和对问题数据的分析,发现LKAS请求扭矩的周期振荡是引起方向盘振荡的主要原因,针对LKAS控制逻辑存在的问题,有如下优化方案:
(1)优化方向盘转角差预估逻辑,减小请求扭矩的振荡;
(2)提高LKAS阻尼控制对请求扭矩振荡的抑制作用;
(3)减小通过弯道时LKAS控制的前馈力矩,同时增加纠偏力矩,保证过弯能力。
车辆通过连续弯道时方向盘振荡优化效果如图9所示。
5 结论
本文首先介绍了LKAS功能的基本概念以及LKAS功能车辆标定前车辆状态排查的目的和排查流程,重点对用于LKAS功能标定的车辆状态进行排查的方法和问题分析思路进行了详细论述,并针对排查发现的问题给出了相应的优化方案。本文中提到的排查流程和针对问题提出的优化方案对LKAS功能调校准备有一定的指导意义。有利于快速锁定问题现象,缩短LKAS调校周期。
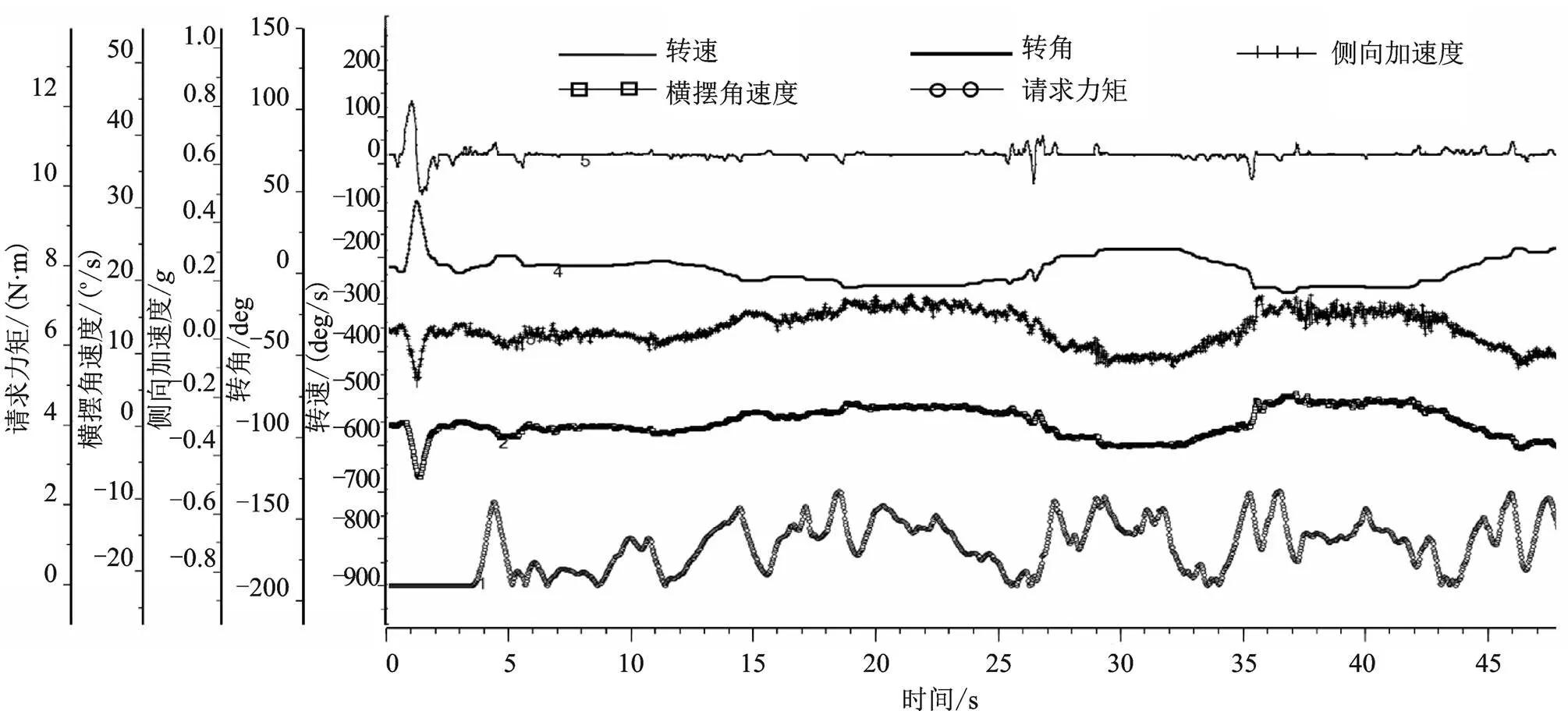
图9 车辆通过连续弯道时方向盘振荡优化效果
[1] 胡成丰.车载毫米波雷达总体方案及信号处理关键技术研究[D].西安:西安电子科技大学,2020.
[2] 马骏昭.侧向驾驶辅助系统发展现状及技术趋势[J].汽车实用技术,2020,45(14):20-23.
[3] 李进,刘洋洋,胡金芳.人机协同下辅助驾驶系统的车道保持控制[J].机械工程学报,2018,54(2):169-175.
Vehicle Status Check and Analysis for LKAS Function Calibration
TANG Chuanjun
( Nidec Suzhou Company Limited, Suzhou 215129, China )
Lane keeping assist system (LKAS) function is the basic function module of advanced driving assistance system(ADAS) function, it places a significance role for the realization of the advanced automatic driving function of the vehicle. The LKAS function is the basic functional requirement for realizing the lateral control of the vehicle control. Good steering performance of the vehicle is the basis for ensuring a good LKAS function. Therefore, before calibrating the LKAS function of the vehicle, it is necessary to check and validate the vehicle status. Analyze the problem issues and provide optimization solutions to ensure that the basic performance of the vehicle can meet the needs of LKAS calibration, and then meet the needs of ADAS function requirements.
Lane keeping assist system function; Calibration; Status check; Problem analysis
U471.15
A
1671-7988(2023)03-54-06
10.16638/j.cnki.1671-7988.2023.03.010
汤传军(1988—),男,硕士,工程师,研究方向为车辆动力学控制及应用、电动助力转向系统设计开发、ADAS功能的设计与开发以及车载电机的控制与应用,E-mail:tangchuanjun.good@163.com。
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
汽车维修与保养(2020年11期)2020-06-09
知识经济·中国直销(2018年3期)2018-04-12
传媒评论(2017年8期)2017-11-08
中国惯性技术学报(2017年1期)2017-06-09
中国交通信息化(2015年10期)2015-06-06
汽车零部件(2014年5期)2014-11-11
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10