汽车空调直流无刷鼓风机调速模块设计
2023-02-18 08:59龚晓庆
汽车实用技术 2023年3期
龚晓庆
汽车空调直流无刷鼓风机调速模块设计
龚晓庆
(上海汽车集团股份有限公司创新研究开发院,上海 201803)
大多数使用换向控制算法的直流(DC)无刷鼓风机调速模块,会导致鼓风机电机转矩波动,使得电机输出风量稳定性下降。文章使用恩智浦MC9S12XDP100单片机设计了一种直流无刷鼓风机的调速模块,开发系统硬件和软件,设计矢量控制双闭环算法,并运用专家系统模糊比例-积分-微分(PID)在转速外环中进行参数整定。通过对转速、风量等相关参数进行测试,实验表明,本调速模块有效解决了换向控制算法带来的转矩波动问题,提高了空调鼓风机风量输出稳定性。
直流无刷鼓风机;调速模块;矢量控制(FOC);专家系统;模糊比例-积分-微分(PID)
1 直流无刷电机的矢量控制
近年来,直流无刷鼓风机在汽车空调鼓风机中得到了广泛使用,在国内汽车空调领域中,传统的空调系统中使用直流有刷电机存在寿命短、电火花等问题,并且风量通过按钮只能调节4或6个挡位,其无法满足用户需求。国外空调鼓风机早已开始使用直流无刷鼓风机,但是控制器中的算法以换向为主,然而换向导致了转矩波动影响转速稳定性[1]。由于鼓风机是小型汽车零部件,大部分国内汽车厂家都是直接从外国厂商购买使用。因此,国内在无刷直流鼓风机驱动调速领域技术相对匮乏。
无刷直流电机外转子的驱动是通过转子在不同位置时,通过定子换向来形成旋转磁场而使电机转动起来,然而普通的6步换向控制转矩波动大,进而导致转速波动、控制精确度低,很难满足鼓风机调速要求[2]。本文以无刷直流鼓风机为研究对象,使用矢量控制算法能降低转矩波动、提高鼓风机的调速性能,从而保证风量稳定。
直流无刷鼓风机也是多磁路强耦合非线性复杂系统[3],可使用Clark和Park变换解耦,解耦后使用I为零控制方法[4]。最终,直流无刷鼓风机的电磁转矩方程为[5]
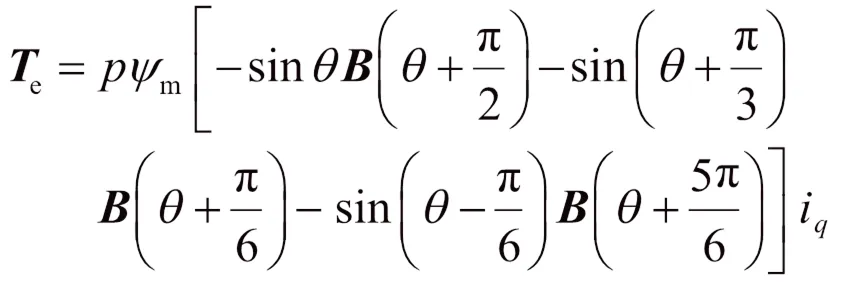
式中,e为电磁转矩;为极对数;m为A相绕组磁链幅值;i为旋转坐标系下轴电流;()为磁密分布;为转子的角度。
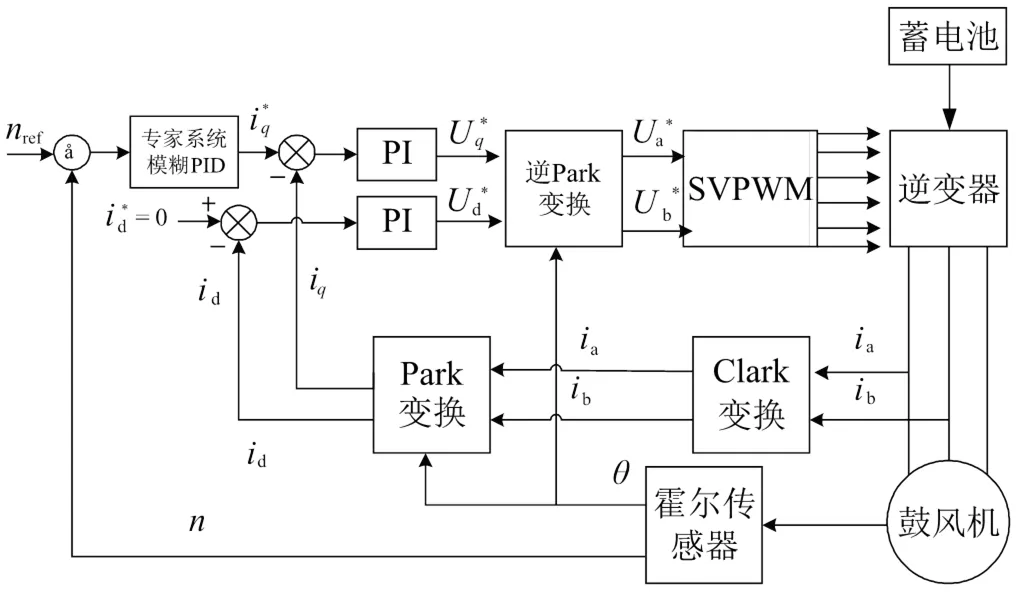
由式(1)可知当转子的位置确定时,直流无刷鼓风机的电磁转矩仅与I大小有关。因此,只要控制I值就能控制电磁转矩的大小。本控制器使用矢量控制驱动鼓风机,控制框图如图1所示。
鼓风机的转速与风量的关系为
=kn+k(2)
式中,为风量;K为转速风量比例系数;K为转速风量补偿系数。
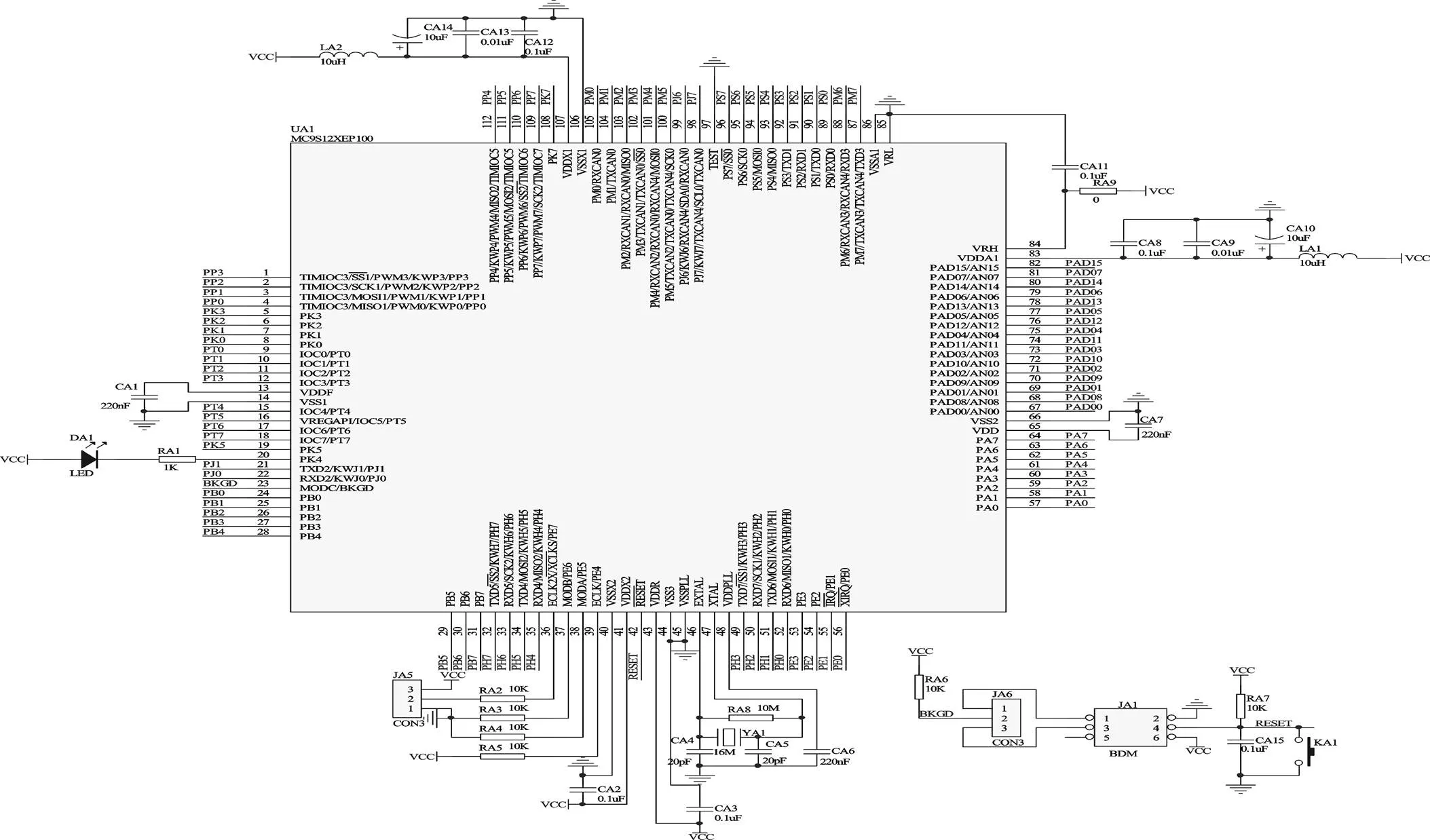
图2 最小系统电路
由式(2)可知风量和鼓风机的转速为线性关系,可以通过调节鼓风机的转速来调节风量。
2 硬件设计
2.1 单片机最小系统设计
MC9S12XEP100是恩智浦公司汽车级单片机,它是基于S12X CPU 的16位单片机。单片机最小系统电路如图2所示,主要包括时钟电路,复位电路,调试电路等。复位电路为手动复位电路,可以随时让程序从头开始执行;调试电路用于调试的时候看单片机是否正常工作。
2.2 电源电路设计
电源电路对于控制器正常工作至关重要,首先通过摩托罗拉公司的LM2576开关电源芯片将电压24 V降压为15 V。LM2576输出电流为3 A,效率高,并且有过热过流保护,电源电路1如图3所示。
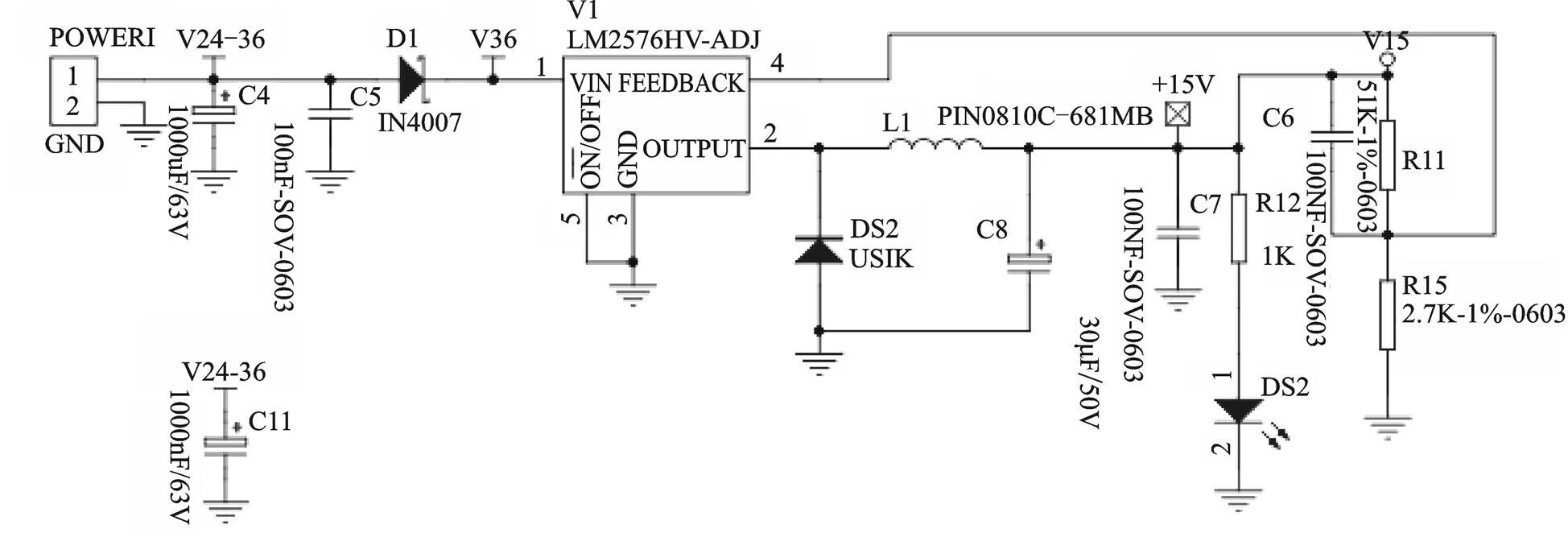
图3 电源电路1
再通过LM2576-5系列将15 V电压降为5 V,电源电路2如图4所示。
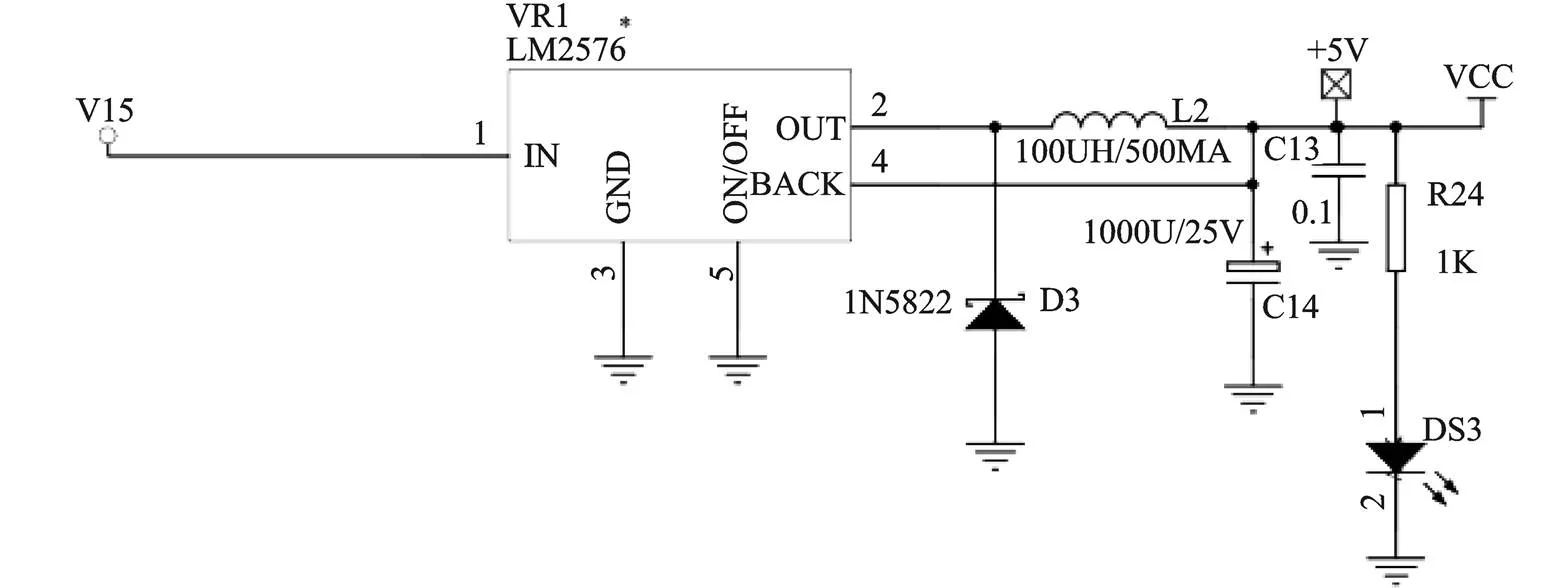
图4 电源电路2
2.3 三相驱动电路设计
驱动直流无刷鼓风机的为6个金属-氧化物-半导体(Metal Oxide Semiconductor, MOS)管组成的三相桥,每个桥电路相同,因此,以U相为代表其电路如图5所示。MOS管选用联合技术公司的功率MOS7N75器件。其中7N75导通电阻为1.7 Ω;漏极至源极间可能承受的最大电压为750 V,且有足够的电压余量,连续工作模式下最大漏极电流为7 A;驱动芯片选用美国国际整流器公司的IR2101。
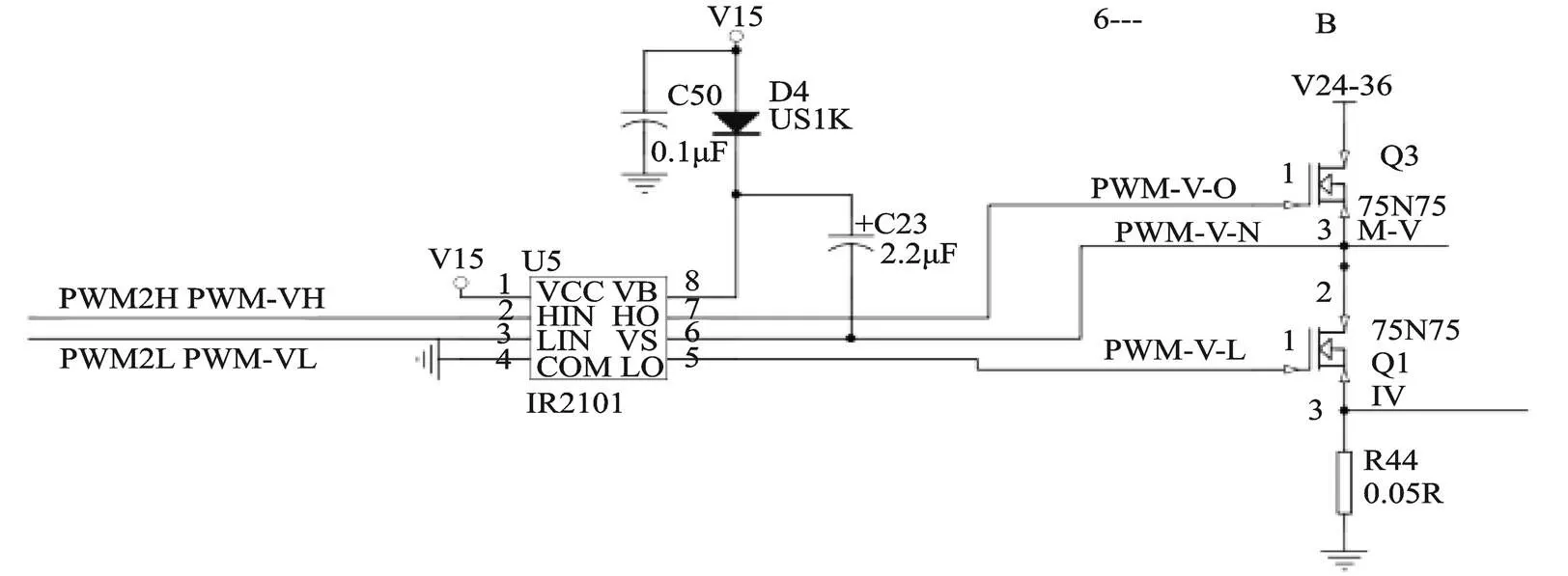
图5 三相驱动电路
2.4 采样电路设计
由于系统需要母线电压和相电流值才能实现直流无刷鼓风机的闭环控制,因此,设计采集电路采集相电流和母线电压。使用的运放芯片为美国微芯公司的轨至轨运放MCP6024。在此基础上,为了提高采集的精度使用差分放大电路如图6所示。其中,由于三相电流之和为零,因此,只需要采集两相电流,通过计算能得到第三相电流。
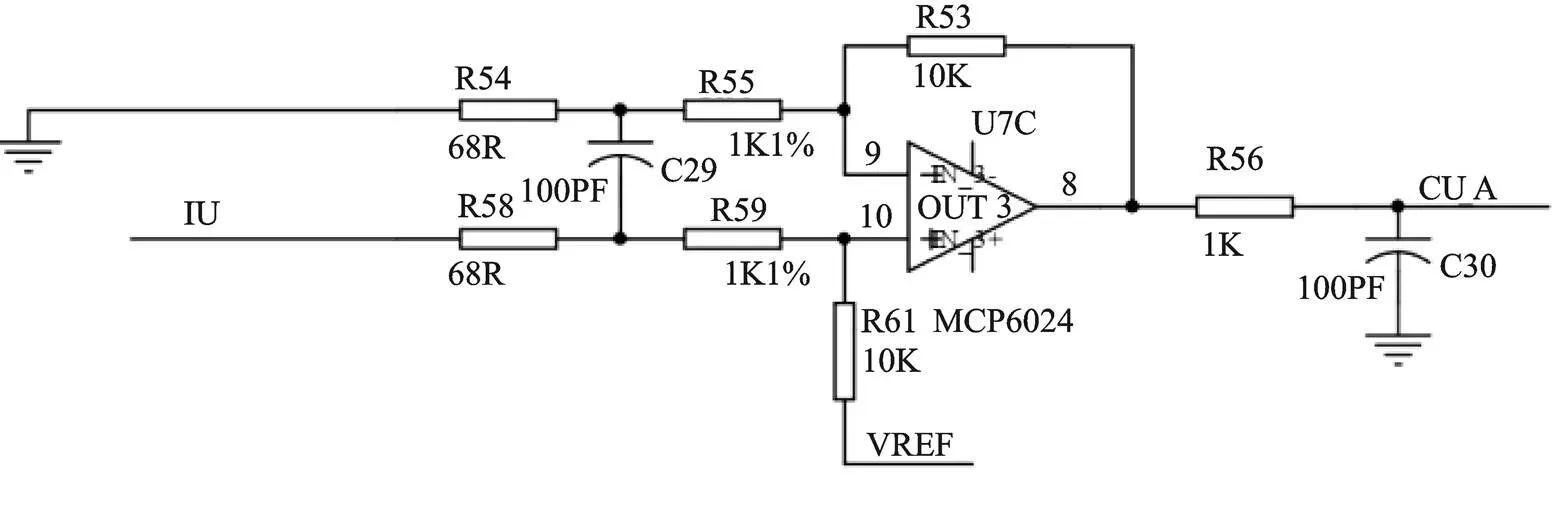
图6 采集电路
2.5 报警电路设计
当电机工作异常发生过流、过压、过热时,程序会先停止电机的运行再通过蜂鸣器报警提醒使用者,并将故障信息通过控制器局域网络(Controller Area Network, CAN)通讯发送至总线。报警电路由无源蜂鸣器、S8050NPN型三极管和限流电阻组成,如图7所示。
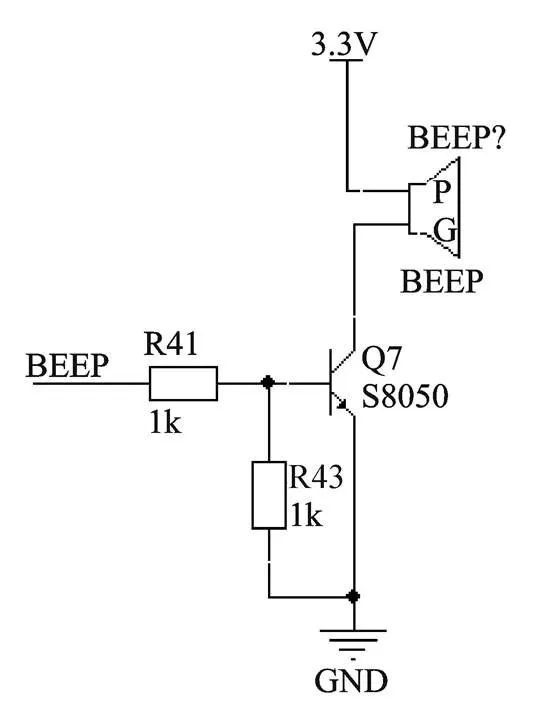
图7 报警电路
2.6 通讯电路设计
本主控芯片具有内置的CAN通信控制器,并且可以通过CAN总线收发器与其他设备通讯,选用恩智浦公司的JTA1050高速CAN收发器。具体电路如图8所示。
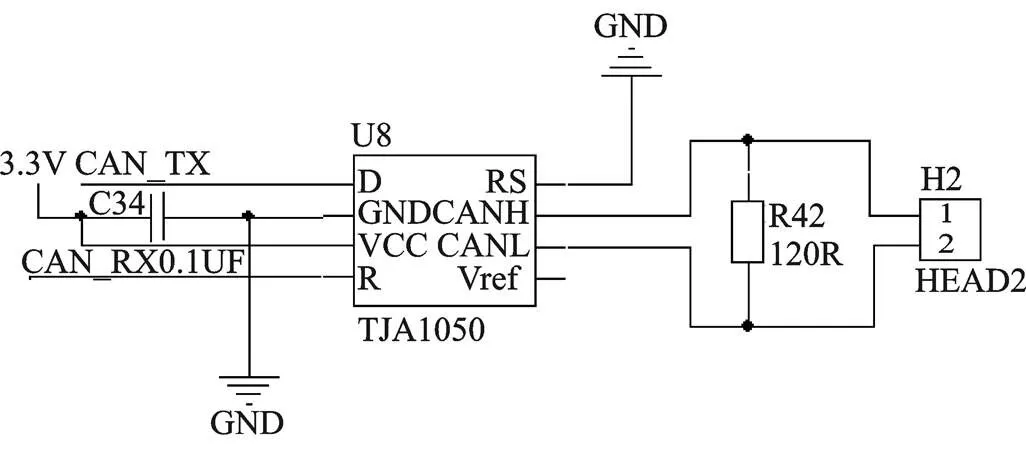
图8 CAN通讯电路
2.7 转子位置检测电路设计
为了使鼓风机正常运转,必须时刻知道鼓风机转子的转角。转子位置检测电路主要连接主控芯片的三个外部中断引脚,通过三个外部中断时刻检测霍尔传感器状态,通过内部程序计算确定鼓风机转子状态。转子位置检测电路如图9所示。
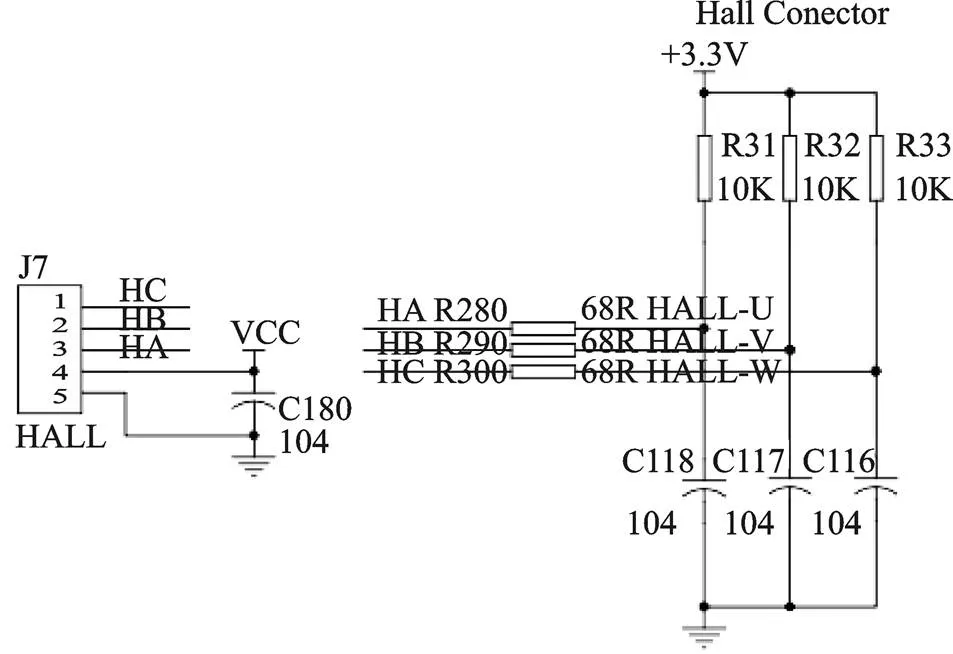
图9 转子位置检测电路
3 软件设计
3.1 双闭环设计
为了提高调速系统的动态响应性,调速系统采用串级双闭环控制,内环为电流环、外环为速度环、控制方式为异步采样控制[6]。考虑到电流内环频率高,因此,电流内环使用传统比例-积分(Proportional Integral, PI)控制器;速度外环运行频率慢而使用专家模糊PID控制器。
3.2 专家系统模糊PID
3.2.1专家系统设计
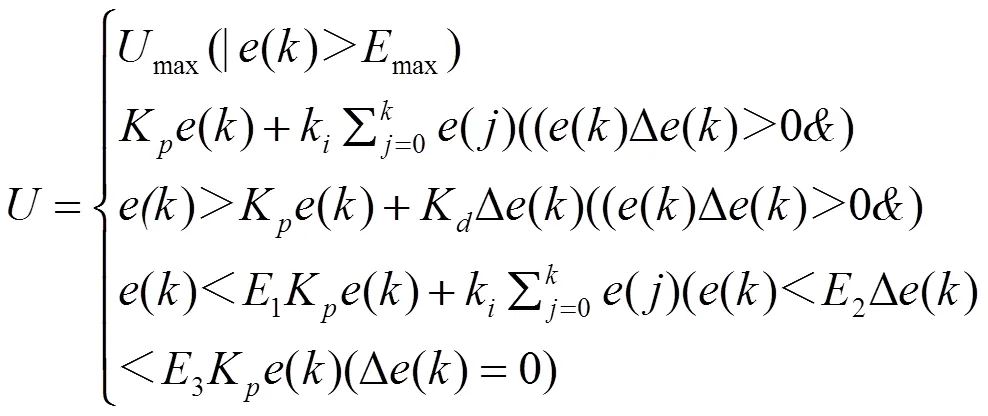
整个调速系统需要3个PID控制器,考虑到PID参数整定的繁琐性,因此,提出专家系统模糊PID控制器。专家系统设计具体如下:
(1)当误差和变化率乘积大于零并且误差绝对值大于1时,说明误差较大使用模糊PI控制。
(2)当误差和变化率乘积大于零并且误差绝对值小于1时,使用模糊比例-微分(Proportional Differentiation, PD)控制器,一方面可以快速减小误差;另一方面防止过量超调。
(3)误差和误差变化率都比较小时,使用PI控制器。
(4)当处于极值时,说明此时绝对值误差很大,使用模糊P控制快速减小误差。
专家系统PID输出为
3.2.2模糊PID规则表
在专家经验下确定不同误差与误差变化率下使用哪种类型PID控制器后,设置模糊规则表,以误差或误差变化率作为输入,整定p,i,d[7],模糊控制框架如图10所示。
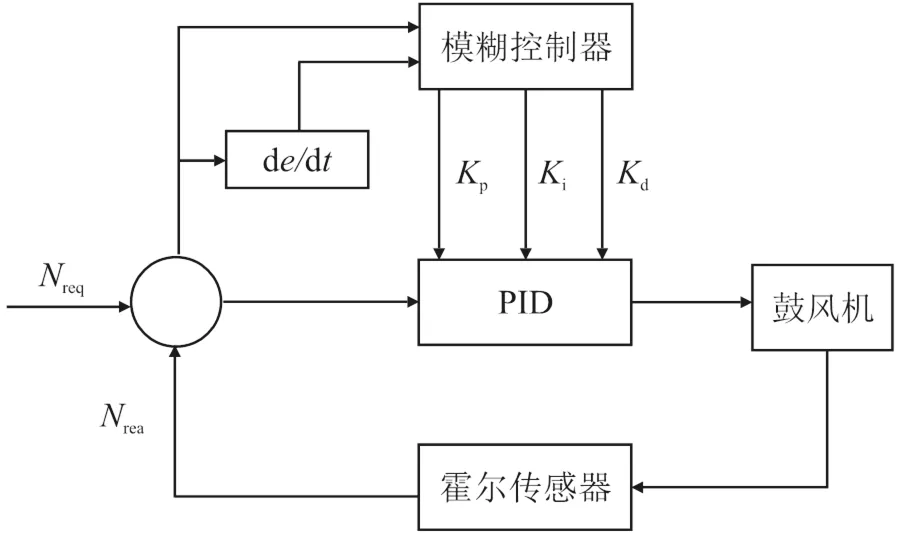
图10 模糊控制框架图
在3.2.1中的(1)(3)情况下使用模糊PI控制器,将误差和误差变化率作为模糊控制器的输入,输出为p,i。模糊PI采用{NB、NS、ZO、PS、PB},5个模糊状态论域为{-2、-1、0、1、2},隶属度函数使用三角函数,规则表如表1所示。
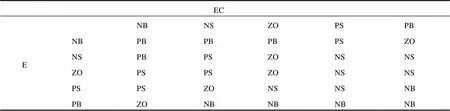
表1 模糊PI控制器规则表
在3.2.1中(2)情况下使用模糊PD控制,其输入为误差和误差变化率,控制器输出为p,d。模糊PD采用{NB、ZO、PB},3个模糊状态论域为{-1、0、1},隶属度函数使用三角函数,规则表如表2所示。

表2 模糊PD控制器规则表
在3.2.1中(4)情况时,仅使用模糊P控制器,快速减小误差,模糊P采用{NB、NS、ZE、PS、PB},3个模糊状态论域为{-2,-1,0,1,2},隶属度函数使用三角函数,规则表如表3所示。
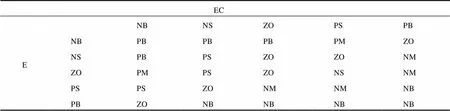
表3 模糊P控制器规则表
使用制定好的规则表通过Mamdani模糊推理,再通过加权平均法解模糊化得到相应的p、id,实现PID的自适应在线调节。
3.3 软件整体设计
软件分为主循环、速度外环和电流内环三部分。由于速度外环使用专家系统模糊PID对中央处理器(Central Processing Unit, CPU)处理速度要求高,因此,将速度外环放到XGATE协同处理器中执行,而电流内环在S12X中正常运行。
主循环当中的首先初始化IO(Input/Output)口、定时器1和定时器2、CAN通讯、模拟信号(Analogsignal/Digitalsignal, A/D)采集、脉冲宽度调制(Pulse WidthModulation, PMW)通道和XGATE,之后启动AD采集功能采集a,b和母线电压等模拟量。之后,解析CAN总线上发来的报文,更新鼓风机的运动状态。当解析完CAN报文后更新后将系统当前基本信息发送到CAN总线上,后判断故障,如果没有继续回到主循环第三步,如故障则停止鼓风机工作,并将故障信息发送CAN总线上。
定时器2转速外环控制20 ms执行一次,其中断在XGATE中运行。XGATE发生中断时,首先判断是CAN通讯接收中断还是电流环中断,运行喂狗程序保持单片机程序不跑飞,在喂狗程序运行完后检测CAN通讯是否正常,如果不正常,则停止鼓风机转动报警提醒驾驶员并退出中断;如果通讯正常判断是否达到10 ms,如果没有达到10 ms,通过霍尔传感器计算当前电机转速,将转速值与目标值做差通过专家PID确定哪种PID比较适合,再通过转速误差与转速变化率通过模糊控制器得到相应p、i和d,最终输出目标I值。速度外环框图如图11所示。
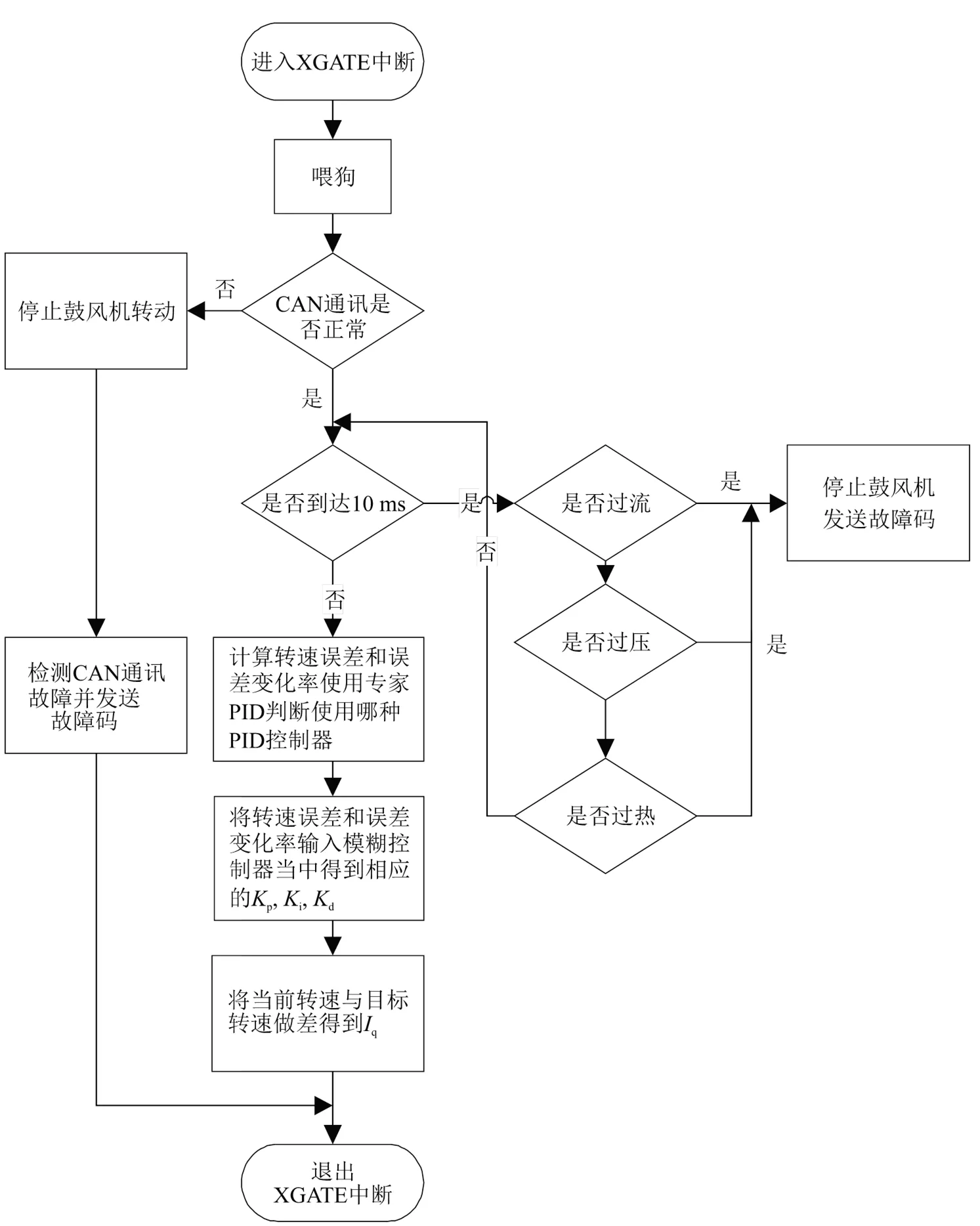
图11 速度外环框图
4 测试过程及结果
4.1 实验测试平台搭建
图12为实验平台搭建布置,最小系统板通过信号线与鼓风机驱动板相连,鼓风机驱动板与鼓风机相连,系统板和驱动板的供电都由直流电源供电。
4.2 速度测试
通过上位机得到换向控制算法与改进算法转速图像如图13、图14所示。在450 ms时通过CAN通讯向调速模块发送目标转速,两种控制方法下都在150 ms时第一次到达目标转速,并且换向控制算法超调量为110 r/min,而改进算法的超调量仅为60 r/min,这体现专家系统模糊PID控制器的优越性。在达到稳态时改进后的算法的波动在2%内,而换向算法波动在4.5%以内。因此,改进后的算法转速更加稳定,这体现了矢量控制的优势。在225 ms时再次加速到2 000 r/min换向算法超调量依然比改进算法大,速度稳定性依然比改进算法差。因此,本无刷直流鼓风机的调速模块转速测试正常{张继华, 2021 #5}。
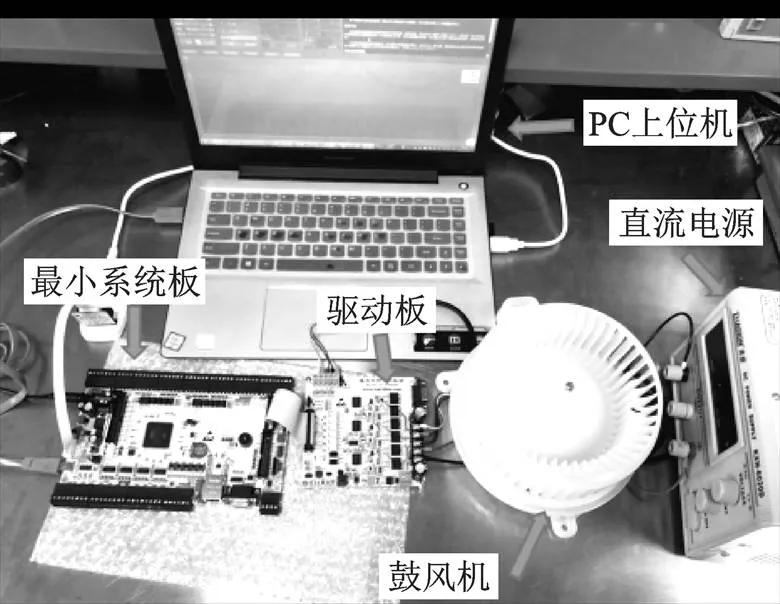
图12 实验布置图
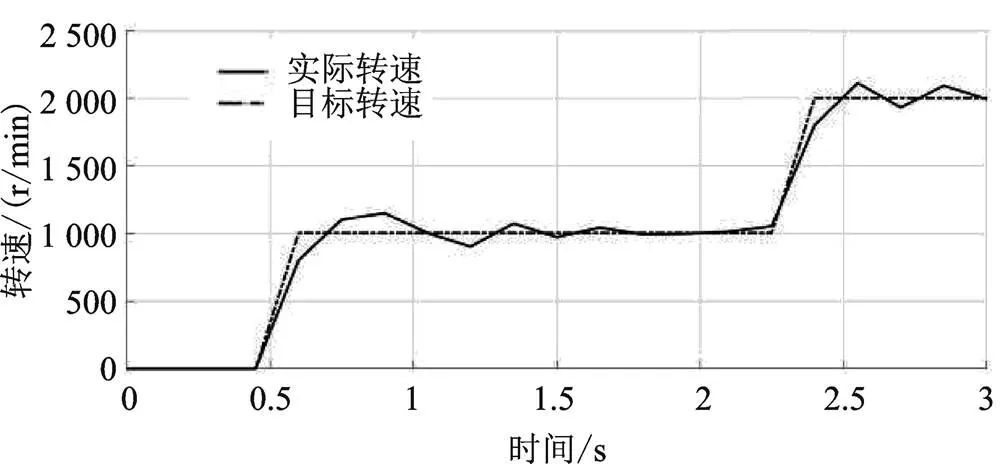
图13 换向算法鼓风机转速图
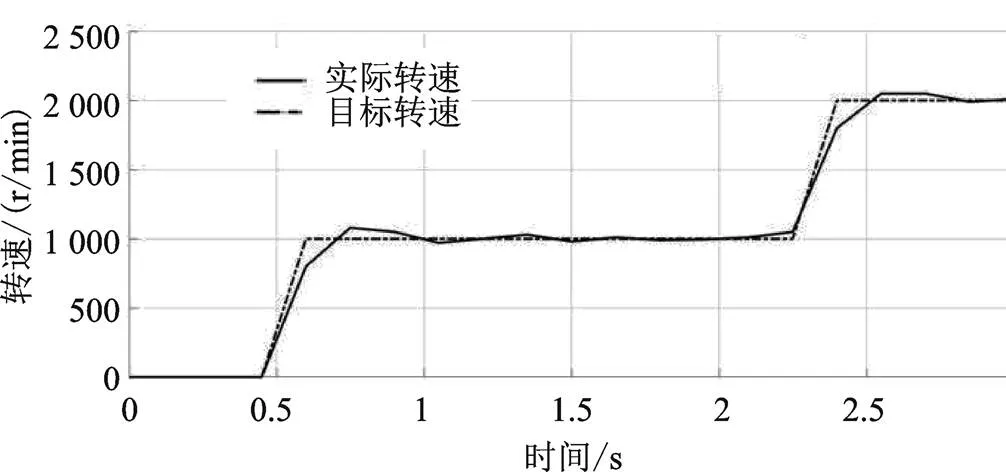
图14 改进算法鼓风机转速图
5 结论
(1)矢量控制双闭环算法成功解决换向控制算法的转矩波动带来的转速不稳定问题,保证了风量的稳定性,提高了系统的稳定性。
(2)转速外环使用了专家模糊PID降低了系统的超调量,提高了系统的抗干扰能力。
(3)本调速模块可以实现了风量的全范围调节,能够满足用户需求。
[1] 张恒.无刷直流电机转矩脉动抑制研究[D].哈尔滨:哈尔滨理工大学,2019.
[2] 张咏昕.基于MCK2812的无刷直流电机矢量控制系统设计与实现[D].太原:太原科技大学,2018.
[3] 汪广.基于DSP的永磁无刷直流电机矢量控制系统的研究[D].长沙:湖南大学,2018.
[4] LIU G,CUI C J,WANG K,et al. Sensorless Control for High-speed Brushless DC Motor Based on the Line-to-line Back EMF[J]. IEEE Transactions on Power Electronics, 2014,31(7):4660-4683.
[5] 刘云,贾洪平,张鹏,等.基于SVPWM的无刷直流电机矢量控制系统研究[J].机电工程,2014,31(9):1177- 1181.
[6] 刘金琨.先进PID控制MATLAB仿真[M].4版.北京:电子工业出版社,2016:116-117.
[7] 韦巍,何衍.智能控制基础[M].北京:清华大学出版社, 2008:70-74.
Design of Speed Regulation Module for Automobile Air-conditioning DC Brushless Blower
GONG Xiaoqing
( Innovation Research and Development Institute of Shanghai Automobile Group Company Limited,Shanghai 201803, China )
Most of the direct current (DC) brushless blower speed regulation module using the commutative control algorithm will lead to the torque fluctuation of the blower motor, which reduces the stability of the motor output air volume. MC9S12XDP100 is used to design the speed regulation module of DC brushless blower, and hardware and software systems are developed, and the vector control double closed-loop algorithm is designed in this paper,and the expert system fuzzy proportion integration differentiation(PID) is used to adjust the parameters in the speed outer loop.Through the test of speed, air volume and other related parameters, the experiments show that the speed regulation module solves the problem of torque fluctuation caused by the commutation control algorithm effectively and improves the output stability of air volume of air conditioning blower effectively.
Direct current(DC) brushless blower;Speed regulation module;Field oriented control(FOC); Expert system;Fuzzy proportion integration differentiation(PID)
U463.8
A
1671-7988(2023)03-100-07
10.16638/j.cnki.1671-7988.2023.03.019
龚晓庆(1991—),男,硕士,工程师,研究方向为汽车电子电气,E-mail:1074500565@qq.com。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
园林科技(2021年2期)2022-01-19
电力与能源(2021年4期)2021-09-07
石油沥青(2021年1期)2021-01-11
防爆电机(2020年5期)2020-12-14
中医眼耳鼻喉杂志(2019年2期)2019-04-13
筑路机械与施工机械化(2018年1期)2018-03-06
汽车维护与修理(2016年10期)2016-07-10
现代工业经济和信息化(2016年2期)2016-05-17
汽车维护与修理(2015年7期)2015-02-28