某轿车操纵稳定性客观试验方法及评价
2023-02-18 08:46杨钧浩李自平
汽车实用技术 2023年3期
杨 飞,杨钧浩,李自平,杨 雷
某轿车操纵稳定性客观试验方法及评价
杨 飞1,杨钧浩2,李自平2,杨 雷2
(1.天府新区信息职业学院,四川 眉山 620564;2.四川建安工业有限责任公司,四川 雅安 625000)
文章主要通过对车辆的操作稳定性试验进行测试,根据8项操纵稳定性客观试验,从而为改善汽车的操纵稳定性、提高车辆的安全性提供依据。通过客观试验原地转向、滚动转向、斜坡制动、On Center(方向盘中间位置转向)、稳态回转、扫频转向、双移线、角阶跃等试验方法得到该样车操稳性能各个方面的关键参数和曲线。基于这些数据,可以对该样车各项操稳性能进行评判,得出结论为该车具备不足转向的特性,为该车型的操稳性能的优化提供依据,同时可为底盘调教提供数据支持,最终为车辆稳定性和安全性提升奠定基础,从而提高该车型的操作稳定性和安全性。
整车试验;操纵稳定性;场地试验
整车操纵稳定性是汽车的重要性能之一,汽车的操纵稳定性评价方法大致分为主观评价、客观评价、基于人-车闭环系统的综合评价等[1],主观评价是基于专业的测试驾驶员根据指定的操纵方法在标准工况下对车辆操纵稳定性的主观感觉,通过一定的标准进行评价,而客观评价是汽车在实车实际测试的工况下进行的,根据测试的操纵稳定性参数来对汽车的性能进行的评价[2]。
汽车底盘的开发阶段,车辆性能目标的设定通常是基于客观评价。结合动力学仿真技术,这些试验在仿真环境下进行,可以大大减少项目研发的成本,同时缩短研发时间[3]。各公司操纵稳定性客观试验的检测方法并不相同,本文提供一种较全面且实用性强的检测方法。
1 试验设备
1.1 设备参数
操纵稳定性客观试验所用设备及参数如表1所示。

表1 设备参数
1.2 设备安装
陀螺仪的安装位置是在车辆的绝对坐标系,即纵向是车辆的纵轴,垂向是重力方向,其中正向为向前,正向为向右,正向为向下。陀螺仪所有的测量参数均相对于安装位置进行了修正:向距离质心位置向后290 mm,向在轮距的中心位置,向距离质心位置向上75 mm。陀螺仪的天线相对于安装位置如下:向、向不变,向向上 1 100 mm。陀螺仪安装照片见图1,力矩方向盘安装照片见图2。

图1 陀螺仪安装照片

图2 力矩方向盘安装照片
2 试验方法
本文操纵稳定性试验方法共包含8项试验,其中原地转向、滚动转向、斜坡制动是参照根据实际经验设定的企业内部标准,On Center(方向盘中间位置转向)、稳态回转、扫频转向、双移线是参照ISO标准,角阶跃是参照国标[4]。具体试验方法见表2。

表2 操纵稳定性试验方法
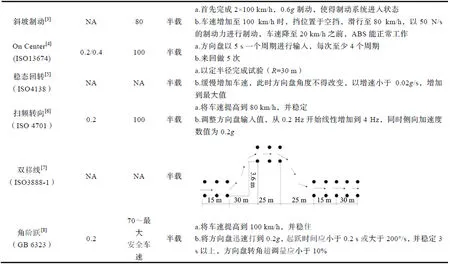
表2 (续)
3 试验结果分析
3.1 试验结果
试验结果关键指标如表3所示。

表3 关键指标
3.2 试验结果分析
3.2.1原地转向
方向盘的力矩及力值属于中等,有着较小的力矩波动,左右转方向盘力矩差异不大。方向盘总圈数为3.167圈。
3.2.2低速滚动转向
中等的低速滚动转向力,迅速到中等的水平,然后转向力趋于小幅稳定增长,如图3所示。
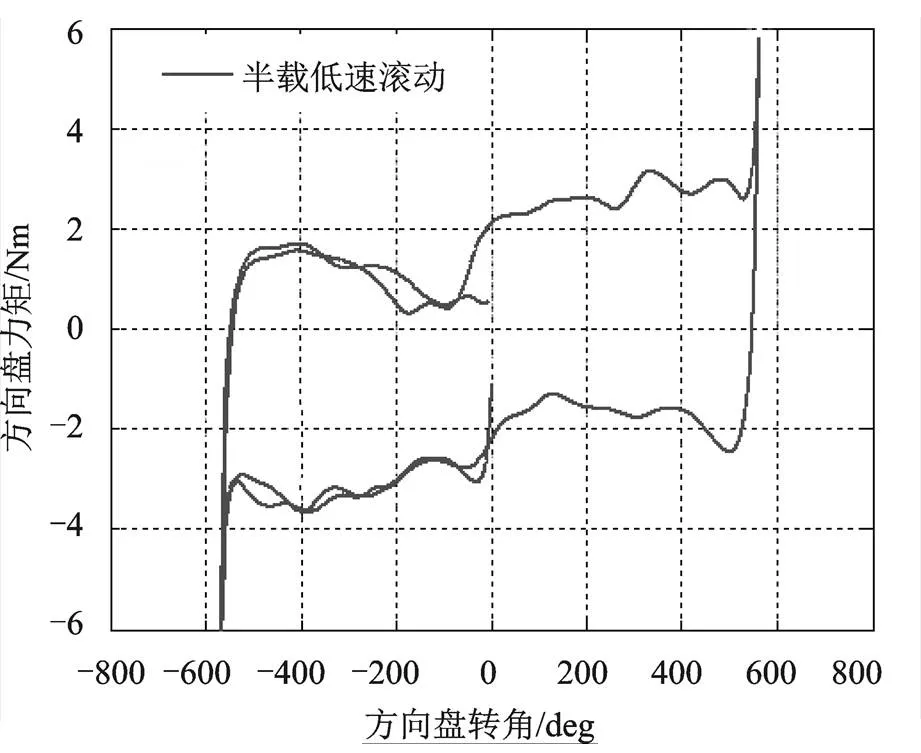
图3 低速滚动转向曲线
3.2.3方向盘中间位置转向
从图4中0.4横摆角速度随着方向盘转角的变化曲线可以推断出样车具有如下比较明显的特性:
(1)中等偏大的横摆角速度响应增益;
(2)中等偏大的侧向加速度响应增益;
(3)偏大的转向系统刚度;
(4)转向力矩的建立较线性,数值偏小;
(5)转向功灵敏度偏大;
(6)侧向加速度死区的方向盘转角属于中等偏大;
(7)转向系统摩擦偏大;
(8)力矩死区的方向盘转角偏小。
根据两个不同的侧向加速度试验数据计算出的数据斜率存在差异。大角度范围相比小角度范围:
(1)转向系统刚度减小,属于中等偏小系统刚度;
(2)侧向加速度增加的情况下方向盘力矩优势减小。
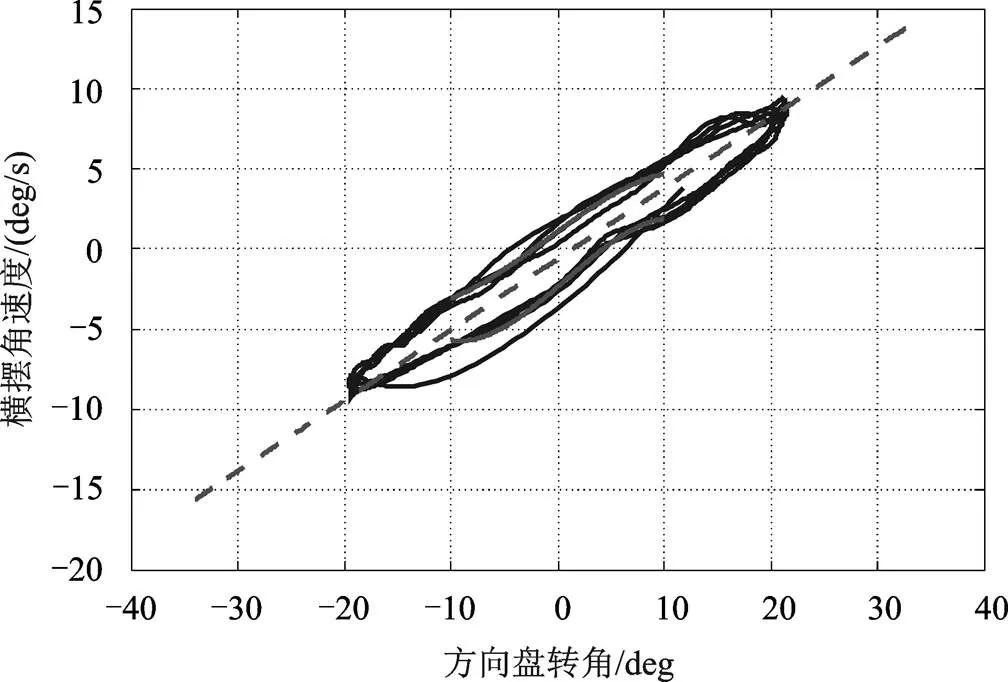
图4 0.4g横摆角速度随着方向盘转角的变化曲线
3.2.4双移线
94 km/h的入桩速度属于偏下,从图5可以看到,方向盘转角、方形盘力矩、横摆角速度、侧向加速度、侧倾角等均是在从变换车道回到原车道后达到最大。

3.2.5扫频转向
图6为各信号的功率谱密度,对各信号所能够覆盖的频率范围进行检验。

转向力矩和方向盘转角的延迟时间对转向感觉非常重要,主要由转向系统的摩擦、惯量和阻尼决定[5]。
侧向加速度的响应延迟时间属于中等偏大,侧向加速度的响应时间与横摆角速度响应时间的差值适当。稳态侧倾角增益与稳态回转试验中的侧倾度有着较好的对应[6]。
3.2.6斜坡制动
从数据中可以看到,样车有着偏大的制动俯仰度值为2.364 deg/。
3.2.7稳态回转
图7和图8表明车辆具有过小的不足转向特性;在高侧向加速度区间,不足转向度对称性较差[7]。不足转向度仍然较小:
(1)低的横摆角速度增益;
(2)侧向加速度中等。
该车具备一定的不足转向特性,数据结果对应的最大侧向加速度为0.78,属于中等。较差的不足转向度的线性特性:
(1)变化不规律的转向响应特性和侧向加速度增益(随着侧向加速度的增大);
(2)车速改变,侧向加速度改变,转向感觉和响应程度很难得到理想状态;
(3)在数值大的侧向加速度下以及侧向加速度增益,响应时间慢均无法提供较好的方向盘中间位置转向响应。
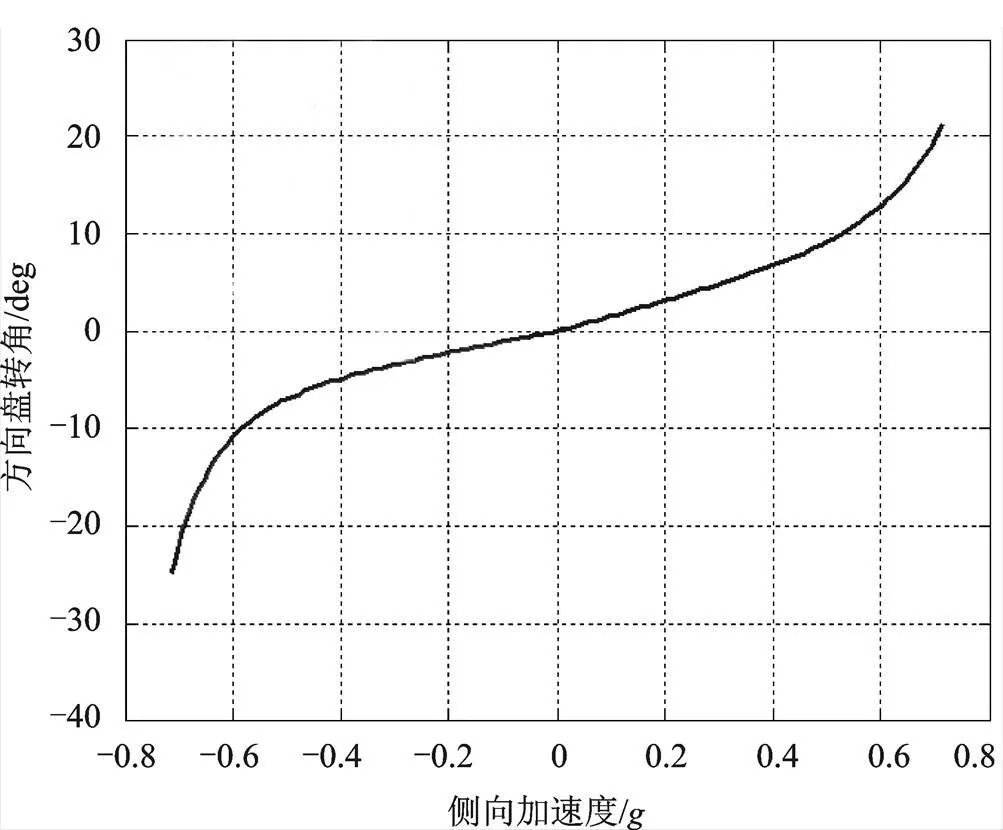
图7 方向盘转角随着侧向加速度的变化曲线
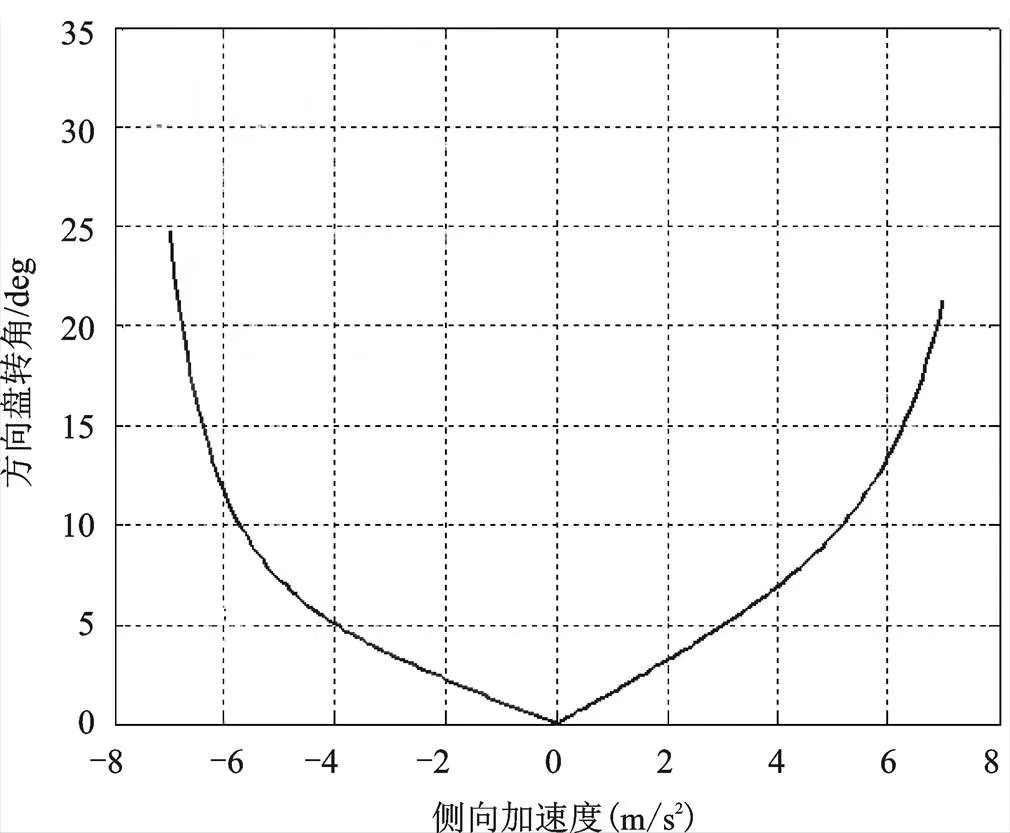
图8 前后轴侧偏角之差随着侧向加速度的变化曲线
从车辆的稳态侧倾特性可以看出左右转的侧倾度一致,平均6.637 deg/的侧倾度属于偏大。
4 结论
通过对试验数据的分析,该车辆具有如下比较明显的特性[8]:首先中等的原地转向力,左、右转方向盘力矩对称性较好,中等的低速滚动转向力,迅速到中等的水平,然后转向力趋于小幅稳定增长,偏小的转向力建立,偏大的转向功灵敏度。中等偏大的侧向加速度死区的方向盘转角,偏大的转向系统摩擦,偏小的力矩死区的方向盘转角。中等的横摆角速度响应时间,中等偏大的侧向加速度响应时间。偏大的制动俯仰度,过小的不足转向度,左右对称性较差,不足转向度线性特性一般,中等偏大的侧倾度,中等的抓地力,中等偏小的最高通过车速。根据实验数据,该车的操纵稳定性还可以进一步提升,可以改变悬架特性及方向盘自由转角提升操纵稳定性,从而提高车辆的安全稳定性。
[1] 杨银辉,靳昕,韩尚尚.基于横向稳定杆的汽车操纵稳定性影响分析[J].汽车实用技术,2021,46(3):103- 105.
[2] 刘雅鑫.汽车操纵稳定性的层次化目标分解研究[D].成都:西南交通大学,2021.
[3] 杨必春.底盘操稳性目标设定浅析[J].时代汽车,2020 (21):157-159.
[4] 刘聪,陈勇,赵理.基于流挖掘的分布式驱动电动汽车横向稳定控制[J].汽车技术,2020,45:(2):33-38.
[5] 刘博伟.汽车操纵稳定性客观评价方法研究[D].重庆:重庆交通大学,2021.
[6] 王佳伟.底盘操纵稳定性开发中的主观评价定量化[D].长春:吉林大学,2020.
[7] 张宏亮,刘志敏,王海,等.基于虚拟分析的某SUV车底盘性能调校[J].农业装备与车辆工程,2020,58(6): 81-84.
[8] 韩帅.复杂工况下轮毂电机驱动电动汽车操纵稳定性控制[J].新型工业化,2020,10(3):67-70.
A Car Handling Stability Objective Test Method and Evaluation
YANG Fei1, YANG Junhao2, LI Ziping2, YANG Lei2
( 1.Tianfu New District Information Vocational College, Meishan 620564, China;2.Sichuan Jian'an Industry Company Limited, Yaan 625000, China )
This article mainly tests the operation stability test of the vehicle, according to 8 operation objective stability tests, so as to provide a basis for improving the operation stability of the vehicle and improving the safety of the vehicle. Through the objective test of in-situ steering, rolling steering, slope braking, On Center (steering wheel middle position steering), steady state rotation, sweep steering, double shift line, angular step and other test methods to obtain the key parameters and curves of the sample vehicle stability performance. Based on these data, can judge the sample car each hold steady performance, concluded that the car has the characteristics of the steering, operation of the steady performance optimization basis, for the model can provide data support for the chassis adjustment, eventually lay the foundation for vehicle stability and safety, so as to improve the operation stability and safety of the model.
Complete vehicle test; Handling stability; Field test
U462;U467
A
1671-7988(2023)03-130-06
10.16638/j.cnki.1671-7988.2023.03.025
杨飞(1992—),男,讲师,研究方向为底盘动力学与新能源汽车技术,E-mail:1223253367@qq.com。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
知识经济·中国直销(2018年3期)2018-04-12
传媒评论(2017年8期)2017-11-08
解放军健康(2017年5期)2017-08-01
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
探测与控制学报(2015年4期)2015-12-15
汽车文摘(2015年11期)2015-12-02