基于无人机SfM 摄影测量的潮间带牡蛎礁地貌调查
2023-02-20 08:29庄佳铨罗科彭雲樊一阳林杭杰王韫玮于谦
海洋地质与第四纪地质 2023年6期
庄佳铨,罗科,彭雲,樊一阳,林杭杰,王韫玮,于谦
1.南京大学地理与海洋科学学院,海岸与海岛开发教育部重点实验室,南京 210023
2.四川省交通勘察设计研究院有限公司,成都 610017
3.南京师范大学海洋科学与工程学院,南京 210023
牡蛎礁是牡蛎群体附着生长在砾石或贝壳碎屑等坚硬底质上的生物礁体,广泛分布于温带潮控海岸的潮间带和潮下带[1]。牡蛎不仅具有食用价值,还能通过滤食作用改善水质。牡蛎礁提供了复杂的三维生境,为底栖和自游生物提供栖息地和避难所[2-3];并能通过促进沉积物沉降、减弱波浪冲击、稳定海岸线,为海草床和湿地的发育创造条件,进而提高海岸生态系统的多样性和稳定性,发挥重要的生态服务功能[4-5]。因此,牡蛎礁也被称为“生态系统工程师”[6]。然而,近一个世纪以来,全球牡蛎礁面积减少了约85%,牡蛎礁面临功能性灭绝的危险[7]。牡蛎礁缓冲带的消失导致近岸生态系统面临诸多生态环境问题,如赤潮频发、水质恶化、渔业资源减少和海岸带退化等[8-9]。
在自然条件下,牡蛎礁会形成不同的空间分布格局,有连片状、环状、条带状、斑块状和边缘状等[10-15]。自然发育形成的条带状牡蛎礁通常垂直于潮流主流向,往往呈韵律状平行分布,礁体宽度和间距大致保持一致,礁体之间为高程更低的沉积物底床[16-17]。这种非随机空间分布模式,在贻贝床也被观测到,并且得到特别研究,一般被认为与物种生存竞争,以及生物与流体动力学之间的反馈机制有关,进而形成的一种自组织形式[12,18-21]。边缘牡蛎礁礁体存在于潮沟边缘和潮滩交界处水深突变的地方,其走向大致平行于水流。斑块状牡蛎礁面积较小,形状不规则,被认为是由其他形态的牡蛎礁退化而成[10-11,15]。环状牡蛎礁是连片牡蛎礁退化的产物,随着礁塘面积的不断扩大,礁塘周围的礁体开口越多,环状牡蛎礁体最终也会形成条带状礁体和斑块状礁体[10-11]。因此,准确获取牡蛎礁的几何形态对于估计其健康状况和生态功能非常重要[22-23]。具体的监测指标,如礁体面积、高度和形态,已被认为是反映牡蛎礁健康和生长的关键指标[10-11,24]。同时,营固着生长的底床生物形成的礁体(如珊瑚和牡蛎等)会对周围的水动力和沉积动力过程产生直接影响[12]。且牡蛎往往生存于一定的悬沙浓度范围内,而区域水动力和沉积动力过程的改变会影响牡蛎礁体周围的悬沙浓度,进而反作用于牡蛎礁体自身的生长发育[25-27]。因此,牡蛎礁体的不同空间分布特征,与其周围的水动力和沉积动力过程密切相关并相互影响。
潮间带牡蛎礁通常只在大潮低潮位时出露,单个潮周期中可观测的时间有限。传统监测方法通过GNSS-RTK 可以对具体的礁体进行连续坐标点采集,以获取面积和高程等信息[28-29]。但是该方法通常是时间和劳动密集型,极大限制了获取大区域和细节信息的能力[30-31]。卫星遥感和传统航空摄影,可以在许多情况下近似地确定牡蛎礁的大小。然而,该方法中影像获取的时间滞后性和低分辨率会影响监测效果[30]。机载激光雷达能获取潮间带礁体高分辨率垂直高度、高程和形态,但是成本高昂,且同样耗费时间[31-32]。随着无人机技术的发展,搭载高像素相机的无人机可以快速获取高分辨率图像,同时基于运动恢复结构(SfM,Structure from Motion)摄影测量方法,可从二维图像组中重建出正射影像和数字高程模型(DEM),分辨率与精度可达厘米级。利用无人机对潮间带大范围牡蛎礁进行地貌观测,以其成本低、可重复性高、快速和准确性高的优势逐渐被采用[28,33]。
位于江苏省海门市潮间带的蛎蚜山牡蛎礁,分布有大面积牡蛎礁礁体。但近年来该区域许多天然礁体被泥沙掩盖,活体牡蛎大量死亡,礁体面积大幅度缩小,快速的泥沙沉积和人为过度捕捞被推测是自然牡蛎礁退化或丧失的主要原因[10-11,34],并被认为和区域水动力学背景[35]和礁体边界层水动力过程[36]有关。蛎蚜山牡蛎礁为研究天然牡蛎礁的退化机制提供了一个绝佳的范例。
本研究的目的是:(1)利用无人机航拍,基于SfM 摄影测量获得蛎蚜山牡蛎礁东部的高分辨率三维模型;(2)解译航拍区域的礁体空间分布格局,为后续研究周围水动力和沉积动力过程奠定基础;(3)探究航拍区域的礁体演化过程。
1 研究区域
本文研究对象——蛎蚜山牡蛎礁(32.139 6°~32.157 2°N、121.542 6°~121.556 3°E),位于江苏省海门市东灶港外辐射沙洲南翼潮间带,小庙洪水道西端南侧,距离海堤约3 海里[10,37](图1)。蛎蚜山牡蛎礁总面积达3.56 km2,区内礁体规模不同且分布不均匀[11]。在中潮汛和大潮汛时,礁体平均出露时长分别为每潮周期2~4、4~6 h。而在小潮汛期间,礁体会有1~2 d 不出露[37]。全为民等[34]于2013—2014 年间的生态调查结果显示,该研究区域中许多天然礁体被沉积物覆盖,礁体面积大幅度缩小,活体牡蛎的平均盖度约为66%。而在本研究现场观测期间,未见到活体牡蛎。研究区靠近吕四海域,为不规则半日潮,潮差较大,小潮约2.5 m,大潮约6 m。涨落潮主要为往复流,但也呈现一点旋转流特征。本海区多年平均波高仅为0.3 m,无浪天数占50%,有浪期间的平均有效波高为0.53 m,波浪作用不显著[38]。
2 研究方法
2.1 野外观测
为了获取海门蛎蚜山牡蛎礁地貌信息,在2022 年6 月17—18 日低潮位期间(中潮汛,潮差约5.5 m)对主礁区东部进行航拍(图1b、c)。
无人机机型为集成了RTK 模块的DJI PHANTOM 4 RTK(2 台),能够提供实时厘米级差分定位数据以及增强像元的绝对精度。为能在涨潮前完成规划区域的航拍任务,同时保证航拍结果的质量,将两台无人机参数设置一致,飞行高度设置为100 m,航向和旁向重叠分别设置为80%和70%,开启白平衡与畸变校正,最终航拍高分辨率照片1 581 张。
由于研究区域信号不稳定,无人机使用的网络RTK 常出现中断,导致无人机拍摄位置与实际存在一定的偏差。因此,在航测区域内设置了10 个地面控制点(图1c),标志物为边长1 m 的正方形相控布,这有助于提升后续制图精度[39]以及对正射影像的水平精度进行评估。使用中海达V60 GPS RTK测量了相控布标志点的坐标,水平精度为1 cm,垂直精度为2 cm。RTK 选用CGCS2000 坐标系,与PHANTOM 4 RTK 自带的实时差分坐标系一致。由于作业时间限制,共测量了3 条短剖面(S1-S3),以评估DEM 精度,每条剖面包含17~22 个验证点,位于航测区域东侧的环状牡蛎礁,从两侧礁体跨越礁塘测量(图2a)。
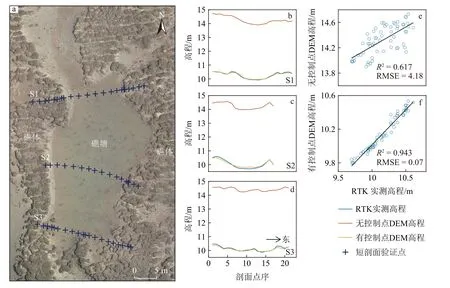
图2 验证点分布情况及精度对比a:验证点分布;b-d:RTK 实测高程(CGCS2000 高程)同无控制点校正的DEM 高程和有控制点校正的DEM 高程对比;e:无控制点校正的DEM 高程与RTK 实测高程的相关性;f:有控制点校正的DEM 高程与RTK 实测高程的相关性。Fig.2 Distribution of validation points and comparison of accuracy a: distribution of validation points; b-d: comparison of RTK-measured elevation (CGCS2000 elevation) with DEM (digital elevation model) elevation without correction and the DEM elevation corrected against control points; e: correlation between the DEM elevation without correction and the RTK-measured elevation; f: correlation between the DEM elevation corrected against control points and the RTK measured elevation.
2.2 SfM 三维重建及精度评估
本文采用Agisoft Metashape Professional 软件对无人机航拍照片进行处理。该软件通过运动恢复结构SfM(Structure form Motion)算法和MVS(Multi-View Stereo)算法处理图像,从而对研究区域实现三维重建,得到正射影像(图1c)和DEM(图3)。为方便后续分析,基于现场观测数据将CGCS2000 高程的DEM 转换为85 高程的DEM,而原始的DEM(CGCS2000 高程)只用于精度评估(图3)。三维重建流程的相关细节可参考相关文献[40-41]。
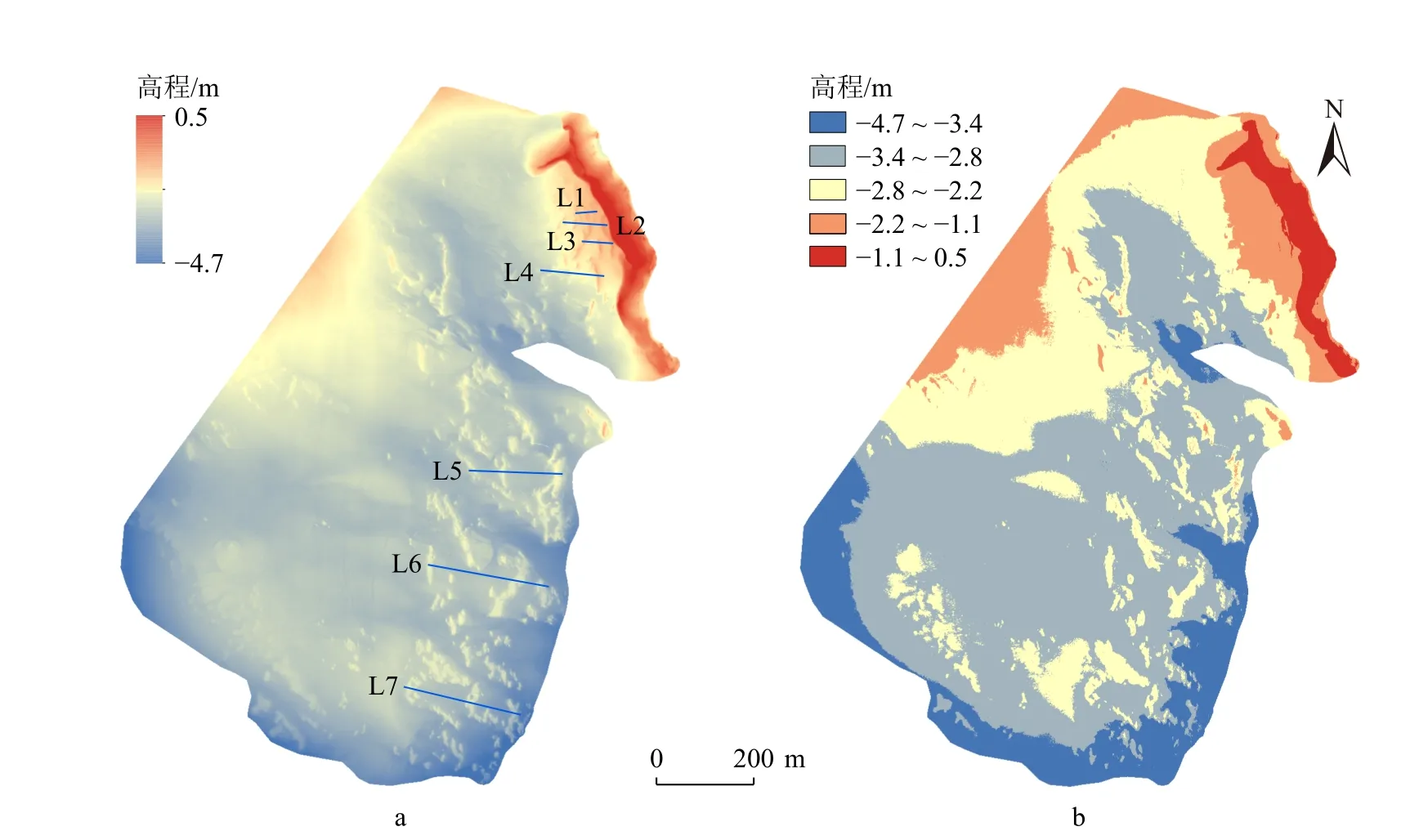
图3 无人机航拍区域对应的DEM(85 高程)a:拉伸效果显示的DEM,L1-L7 为跨越多条平行分布的条带状牡蛎礁的剖面线;b:Jenks 自然间断点法划分的DEM,共分为5 类。Fig.3 DEM (1985 national elevation) corresponding to the UAV photography area a: DEM (digital elevation model) with a stretched effect, where L1-L7 are profile lines across multiple parallel “string” oyster reefs; b: 5 categories of DEM classified by Jenks natural break method.
由于航拍区域东侧分布大面积水体,水体深度和浑浊程度对摄影测量的精度会造成极大的影响,并且水体影像特征点较少,往往导致重建模型质量欠佳[28,42]。因此,将航测区域东部大面积水体对应的密集点云进行删减,同时过滤掉其他低置信度密集点云。无人机航片重建点云密度为326 pts/m2,在地面控制点优化下,基于密集点云生成的正射影像分辨率为2.77 cm/pix,DEM 分辨率为5.54 cm/pix。
通 过 直 接 使 用Agisoft Metashape Professional 中的测量工具,共测量了正射影像中10 处(图1c)地面控制点的相控布边长,结果为1 ± 0.03 m,正射影像的水平精度达到了厘米级别。通过验证点对DEM进行精度评估,并与无地面控制点优化的DEM 精度进行对比(图2b-f)。无控制点优化的DEM 高程明显高于RTK 高程,均方根误差(RMSE,root mean squared error)高达4.18 m,R2仅为0.617。而有控制点优化的DEM 高程和RTK 高程基本一致,RMSE仅为7 cm,R2为0.943。有控制点优化的DEM 更准确地反映了测量区域的实际高程,以及地形相对变化,垂向精度同样达到了厘米级别。
2.3 无人机航测区域地貌分析
本文利用航拍区域正射影像的颜色、形态和纹理等信息,在ArcMap 中进行目视解译和手动提取几何参数,并用Jenks 自然间断点分级法将航拍区域的高程划分为5 个级别(图3b),进而分析该区域的主要牡蛎礁类型及其宏观分布格局。为分析和对比贝壳堤弯口内和潮水湾南侧平行分布的条带状牡蛎礁分布规律(图1c),在目视解译的基础上,手动提取了7 条剖面,剖面整体上垂直于平行分布的条带状礁体脊线(图3a)。同时,选取了航拍区域内具有代表性的不同退化特征的礁体正射影像(图4),以分析该区域牡蛎礁体的演化过程。
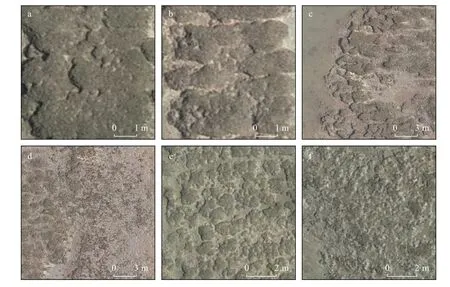
图4 不同演化阶段的牡蛎礁体a:礁体表面坑洼,b:坑洼扩张和延伸,c:溶槽分隔礁体,d:次生礁坪,e:礁块分解和掩埋,f:原生礁坪。Fig.4 Oyster reefs at different stages of evolution a: potholes on the surface of reef, b: expansion and extension of potholes, c: grooves separating the reef, d: secondary reef flat, e: breakup and burial of reef mass, f: proto-reef flat.
3 结果
3.1 航拍区域牡蛎礁的分布格局
根据航拍区域的正射影像(图1c)和DEM(图3),牡蛎礁主要分布在区域东侧,礁体大致分为3 种形态:斑块状、条带状和环状(图5),条带状礁体的礁脊整体上呈南北走向。此外,现场调查未见礁体上有鲜活牡蛎附着。
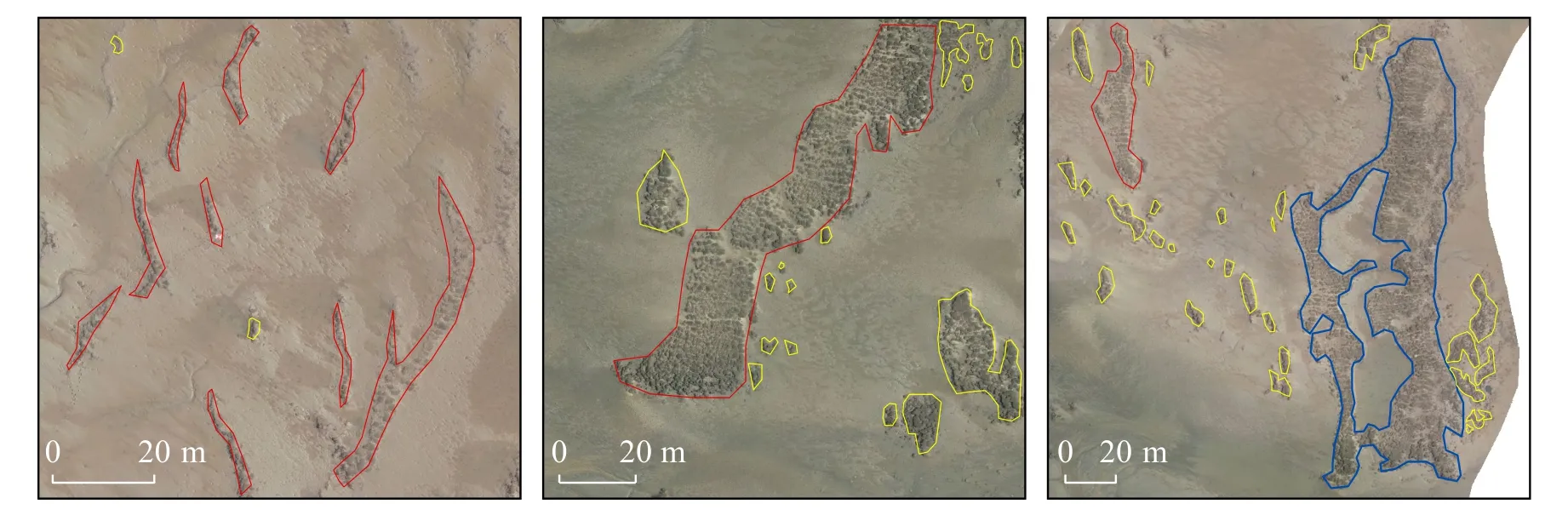
图5 航拍区域内牡蛎礁的主要形态红色标记线代表条带状牡蛎礁,黄色标记线代表斑块状牡蛎礁,蓝色标记线代表环状牡蛎礁。Fig.5 Main morphologies of oyster reefs in the aerial photography area Red lines indicate “string” oyster reefs, yellow lines indicate “patch” oyster reefs, and blue lines indicate “ring” oyster reefs.
航拍区域东北角发育贝壳堤(图1c),堤体弯曲,弯口朝向西南方向,面积约3.3×104m2,堤上东侧覆盖有牡蛎礁,沿靠海侧边缘呈条带状分布。贝壳堤弯口内,为条带状牡蛎礁密集区,条带状礁体整体呈平行分布,礁体受沉积物掩埋较为严重。同时,伴有零星分布的斑块状牡蛎礁,整体上沿着条带状牡蛎礁礁脊方向分布。弯口内条带状礁体的沿脊方向的长度为10~70 m,垂直于脊方向的宽度为1~4 m。该区域的牡蛎礁面积最大约为850 m2,位于贝壳堤堤体的南侧,面积最小的不到1 m2。
航拍区域东侧潮水湾以南(图1c),以条带状牡蛎礁和斑块状牡蛎礁为主。区域内条带状礁体的沿脊方向的长度为10~170 m,垂直于脊方向的宽度为1~15 m。同时,该区域的条带状礁体形状较不规则,分布错综复杂。斑块状礁体零星分布于条带状礁体周围。此外,潮水湾南侧存在整个航拍区域中的唯一一块环状牡蛎礁,位于航拍区域东侧的中间位置(图1c,图5),礁塘内明显可见积水。该区域面积最大的牡蛎礁为环状牡蛎礁,面积约5 600 m2,也是整个航拍区域面积最大的礁体,而面积最小的为斑块状礁体,同样不超过1 m2。航拍区域的西侧则几乎没有礁体存在。
对图3a 中标出的7 条代表性地貌剖面,根据高程结果结合对正射影像(图1c)的目视解译,剖面中的峰值对应礁顶高程,沿剖面线的礁体高度定义为礁顶与礁体两侧边缘处的高差的平均值,结果如图6。值得注意的是,礁体两侧边缘处并不是刚好位于剖面的坡折处,而是位于坡折处之上一段距离(图6)。结合现场观测,坡折处与礁体边缘处之间主要覆盖着粉砂淤泥质沉积物,指示着细颗粒沉积物在礁体两侧的堆积。由于手动操作和DEM 存在误差,以5 cm 为间隔统计礁体高度。同时为方便统计,忽略小于1 m 的礁体间距变化。可以看到,贝壳堤弯口内的剖面结果(图6a-d)中,除L4 剖面(图6d)中有一处礁体间距相对较大,为42 m,其余相邻礁体间距为10~24 m,且同一剖面中的相邻礁体间距较为接近,相差不超过6 m。而潮水湾南侧的剖面结果(图6e-g)显示,相邻礁体间距整体较大,为20~140 m,同一剖面中相邻礁体的间距也存在较大差异,最小相差35 m,最大相差120 m。此外,贝壳堤弯口内的条带状牡蛎礁高度整体上小于潮水湾南侧的条带状牡蛎礁高度,前者的礁体高度分布为10~40 cm,平均为20 cm,后者的礁体高度分布为 30~60 cm,平均为45 cm。

图6 跨越平行分布的条带状牡蛎礁的剖面结果(85 高程)波峰上的尺寸表示礁体高度,箭头线之间的尺寸表示相邻条带状礁体的间距,箭头处为手动提取的礁体边缘位置。a-d: 分别对应贝壳堤弯口内的L1-L4 剖面,e-g: 分别对应潮水湾南侧的L5-L7 剖面。Fig.6 Results of profile lines across parallel-distributed “string” oyster reefs (against the 1985 national elevation datum point of China)Numbers on the crests indicate the height of the reefs.Numbers next to the arrow lines are the spacing between adjacent "string" reefs.Arrows indicate the manually extracted positions of the reef edges.a-d: correspond to L1-L4 profiles inside the shell embankment; e-g: correspond to L5-L7 profiles on the south of the tidal bay.
3.2 航拍区域牡蛎礁的高程分布
礁区地势最高处位于东北角贝壳堤,最高高程可达0.5 m(85 高程,下同),整个贝壳堤的高差约3 m。贝壳堤弯口内的平行条带状牡蛎礁密集区,以及航拍区域西北部的边缘地势也比较高,该区域高程分布为-2.2~-1.1 m,个别礁体顶部高程超过-1.1 m。上述区域之外的其他区域高程整体相对较低,但地形起伏大,尤其是东侧牡蛎礁密集区域,地形尤为复杂,整体高程分布为-4.7~-2.2 m,个别礁体顶部高程分布为-2.2~-1.1 m。地势最低处主要位于航拍区域东南角和西南角,高程分布为-4.7~-3.4 m。
整体而言,航拍区域的地貌面不是一个水平面,地形起伏相对较大,高差可达5 m 以上。同时,除了贝壳堤的部分较高区域,其余航拍区域的高程均在0 m(85 高程基准)以下。
3.3 航拍区域牡蛎礁的演化特征
结合现场调查,可以认定航拍区域的牡蛎礁体整体仍处在退化过程中。由于没有活体牡蛎在礁体表面附着,礁体表面在浪流作用和溶蚀作用下形成坑洼(图4a)。随着坑洼扩大或向周围延伸(图4b),逐渐穿透礁体形成溶槽(图4c)。而随着溶槽继续侵蚀扩大,礁体最终被分隔开,呈密集的斑块状(图4c)。礁体在浪流侵蚀及溶蚀作用下破碎,这些破碎的介壳可同沉积物共同形成次生礁坪(图4d)。同时,随着礁块的分解和沉积物的掩埋(图4e),原本的礁体向原生礁坪演化(图4f)。
4 讨论
4.1 无人机SfM 摄影测量在潮间带牡蛎礁地貌观测上的应用
无人机SfM 摄影测量方法极大促进了对潮间带牡蛎礁的地貌研究,本研究在低潮位期间约2.5 h内完成约1 km2区域的无人机飞行作业、地面控制点测量工作和验证点的测量工作,以厘米级别的分辨率和精度重建航拍区域的三维模型。相较于传统GPS 测量、卫星遥感、机载激光雷达和传统航空摄影等方法,SfM 摄影测量方法整体突出可重复性高、成本低、分辨率高和精度高的优势[28]。
需要指出的是,在潮间带牡蛎礁内作业是一件具备挑战的工作。蛎蚜山牡蛎礁只在中潮汛和大潮汛的低潮位期间出露水面,礁区与海岸隔离,进入现场需要涉水。礁区网络RTK 信号不稳定,影响了无人机获取照片地理信息的准确性。因此,需要地面控制点用于校正,而地面控制点的数量同样影响最终校正的结果[43],也影响到现场作业的工作量和劳动力需求。潮间带的积水也是影响摄影测量的重要因素,水气界面对于光折射的影响和水体特征点的不足导致点云的移位都会降低高程数据的准确性[28,42]。虽然在三维重建过程中会对大面积水体对应的密集点云进行过滤和删减,但由于缺失被删减点云对应位置的相关信息,最终还是会对重建模型的精度有所影响。
手动提取礁体的几何参数是一项非常耗时的工作。随着深度学习的发展,图像语义分割能对图像进行检测和分类,达到自动提取目标对象的效果,已有研究者用于牡蛎礁的识别[44]。SfM 摄影测量技术融合礁体自动提取技术,能够帮助相关科研工作者更高效地完成牡蛎礁检测工作。
本研究只对剖面线(图6)上的礁体高度进行描述,这是由于手动提取的方式无法获取礁体完整的高度。礁体的高度实际上影响着牡蛎的生长发育和周围的水动力过程,通过影响流速和沉积物沉积而改变流场环境,流场环境的变化又影响了礁上牡蛎的生长和存活。Lenihan 等[18]研究发现牡蛎生长生存多发生在高大礁(大于1 m)的礁顶,主要是由于礁顶流速更快,减少了沉积物沉积,增加了颗粒通量,而沉积物沉积和牡蛎死亡多发生在低矮的礁体上(0.1 m)。Morris 等[45]发现礁顶高度还是影响波浪衰减的关键因素。因此,在SfM 摄影测量技术的基础上,探究更高效的礁体高度获取方式,以绘制更全面的区域礁体高度图,对后续研究牡蛎礁与水动力过程的反馈机制具有重要意义。
4.2 牡蛎礁空间分布格局和演化过程
整个航拍区域的牡蛎礁集中在东部,主要礁体类型为条带状、斑块状和环状,这可能是由于东部紧靠小庙洪水道,海水交换活跃,牡蛎生长发育更好,礁体较西部密集。条带状礁体整体呈南北走向,可能与该区域的水流方向有关[35,16-17]。在张忍顺等[11]于2003 年6 月16—18 日现场调查期间,潮水湾南侧还是环状牡蛎礁的密集区域,但礁体在化学溶蚀与浪流侵蚀作用下,已经处于退化阶段。而在本研究中,该区域只剩下唯一一块环状礁体,且礁面无鲜活牡蛎。结合本研究中对正射影像的解译,其演化过程主要为:礁体表面出现坑洼→坑洼进一步扩张、延伸→形成溶槽→礁体分隔、分解。结合现场调查,沉积物对礁体的掩埋伴随着整个演化过程。可见,潮水湾南侧的大部分条带状牡蛎礁和斑块状牡蛎礁由环状牡蛎礁退化形成,且最终向礁坪演化。
贝壳堤(图1c)弯口内的条带状牡蛎礁在分布上明显具备一定规律,相邻条带状礁体之间的间隔较为接近,垂直于脊方向的礁体宽度也基本一致。结合全为民等[34]于2013—2014 年间对蛎蚜山牡蛎礁的无人机航拍解译结果,贝壳堤弯口内呈韵律状分布的条带状牡蛎礁比现在更密集,这种分布形式在贻贝床中也存在[19-20]。而潮水湾南侧的条带状牡蛎礁之间的间隔则无明显规律,垂直于脊方向的礁体宽度差异也较大。因此,贝壳堤弯口内的条带状牡蛎礁分布形式,可能由牡蛎的自组织过程形成[12,18,21],有别于潮水湾南侧由环状牡蛎礁退化形成的条带状牡蛎礁。此外,贝壳堤弯口内的条带状牡蛎礁高度整体上小于潮水湾南侧的条带状牡蛎礁高度,结合对正射影像的解译,贝壳堤弯口内的礁体受沉积物掩埋更加严重。这种分布差异可能反映了潮水湾南北两侧不同的水动力和沉积动力条件,有待后续进一步研究。
5 结论
(1)SfM 摄影测量重建的三维模型具备较高的分辨率和精度,能满足对牡蛎礁地貌的有关研究。该方法兼具高效、高精度和低成本等优点,适用于难以通行的区域,同时满足不同时间尺度的研究需求(如月度、季度和年际变化等)。
(2)蛎蚜山牡蛎礁的东部礁区,礁体分布较不均匀,主要有斑块状、条带状和环状三种形态,条带状礁体整体呈南北走向。区域地形整体起伏较大,高差可达5 m 以上,地势最高处高程为0.5 m(85 高程,下同),最低处高程为-4.7 m。贝壳堤内的条带状牡蛎礁很可能由牡蛎的自组织过程形成,而潮水湾南侧的条带状牡蛎礁主要由环状牡蛎礁退化形成。整个区域内的斑块状牡蛎礁,主要由环状和条带状牡蛎礁退化而成。
(3)当前蛎蚜山牡蛎礁东部的礁体仍处于退化阶段,受化学溶蚀与浪流侵蚀共同作用,其演化过程主要为:礁体表面出现坑洼→坑洼进一步扩张、延伸→形成溶槽→礁体分隔、分解等过程,同时伴有沉积物对礁体的掩埋。
猜你喜欢
水运工程(2022年3期)2022-03-25
基层中医药(2021年7期)2021-11-02
趣味(语文)(2021年12期)2021-04-19
渔业现代化(2021年1期)2021-03-09
小哥白尼(野生动物)(2019年6期)2019-10-10
渔业研究(2019年2期)2019-04-25
读友·少年文学(清雅版)(2018年4期)2018-01-14
海洋石油(2017年1期)2017-03-29
学苑创造·A版(2016年5期)2016-06-21
大众考古(2015年6期)2015-06-26