基于多源异构空间数据的堰塞湖三维动态虚拟仿真平台构建
2023-02-21 06:46孙黎明魏迎奇吴帅峰肖建章
人民黄河 2023年2期
孙黎明,魏迎奇,吴帅峰,肖建章,严 俊
(中国水利水电科学研究院,北京 100084)
1 引 言
我国是堰塞湖类型最多、分布最广的国家,近年来发生多起由堰塞湖溃决引发的主河超常洪水灾害,造成巨大的生命财产损失[1-3]。堰塞湖是由地震、强降雨、火山喷发等引发的从高位滑下的滑坡体、泥石流、火山喷发物、冰碛堆积体等横向阻塞河道形成的湖泊。由堰塞湖溃决引发的洪水灾害相比普通水工建筑物的损毁事故具有危害大、时间短、应急抢险挑战性强等特点。为提高堰塞湖应急抢险的决策效率和效果,需要对通过卫星遥感、无人机、激光雷达(LiDAR)、干涉雷达(InSAR)、地面测量等多种感知方法得到的数据进行融合处理[4-5]。然而,传统堰塞湖信息化平台的创建大都是针对单一感知方法、单一数据种类以及三维可视化等基本功能[6-8],无法满足多部门数据统一管理、数据实时更新、多尺度三维模型快速构建的需要,更无法实现堰塞湖形成全过程的静态三维虚拟地理环境构建和动态过程仿真模拟。
针对以上问题,本文以白格堰塞湖为例,提出一种基于多源异构空间数据的堰塞湖三维动态虚拟仿真平台构建方法,首先确定用于堰塞湖三维建模的多源异构空间数据,然后提出堰塞湖多尺度三维数据模型设计方法,针对不同尺度提出堰塞湖三维静态模型构建方法,基于此对堰塞湖河流演进过程、堰塞体形成过程等进行动态可视化仿真模拟,最后对堰塞湖三维动态虚拟仿真平台架构进行介绍并验证平台构建方法的合理性和可行性,以期为类似堰塞湖的抢险救灾提供软件支撑。
2 堰塞湖多源异构空间数据
堰塞湖多源异构空间数据指可以表示对象空间位置和空间形态的数据,这些数据来源、性质、格式均不相同,是进行三维可视化和动态虚拟仿真的基础数据,主要包括遥感地理信息数据、水文气象数据、生境数据、堰塞体几何形态数据。
(1)遥感地理信息数据。通过获取堰塞湖发生地、堰塞湖水下区、上游淹没区以及溃坝后下游洪水淹没区的地形和影像,可以快速掌握堰塞湖上下游的地物状况,输出高精度的三维地形图、专题地图、等高线图、形变图等[9-10],从而为救灾决策提供基础地理信息支撑。堰塞湖通常发生在人迹罕至、交通不便的偏远地区,实地监测和数据采集难度大,需要采用卫星、无人机等搭载光学传感器或者激光传感器进行远距离测量,获取堰塞湖大范围的地形和影像,再利用旋翼无人机、InSAR、三维激光扫描仪、多波束测深仪、机载LiDAR获取堰塞湖局部的高精度地形和影像,此类数据主要是地理栅格图像和点云数据[11]。基于相关数据输出的白格堰塞湖数字正射影像(DOM)见图1。

图1 白格堰塞湖数字正射影像
(2)水文气象数据。水文气象数据是对堰塞湖应急抢险、上下游灾害风险评估的重要动态数据,包括水位、流量、流速、降水量等,由水文站网和临时布设的测站监测可得,监测位置包括堰塞湖入库、出库、过流位置。
(3)生境数据。针对堰塞湖形成后带来的社会危害以及堰塞湖应急处置和灾后恢复重建工作中涉及的社会因素,在堰塞湖上游地质灾害风险链评估中应充分考虑生境数据,具体涉及沿江影响范围内的人口分布、交通基础设施、大型厂矿设施、文物等。
(4)堰塞体几何形态数据。在堰塞湖发生第一时间需要获取堰塞体表面和内部的几何形态数据,包括堰塞体长、宽、高、方量、坡比、物质组成等。
3 堰塞湖多尺度三维数据模型设计方法
通过设计堰塞湖多尺度三维数据模型实现多源异构空间数据的快速存储、查询、更新以及大量三维模型的快速展示,堰塞湖多尺度三维数据模型设计包括以下内容。
(1)确定模型几何数据结构。数字高程模型(DEM)是通过有限的地形高程数据实现对地面地形的数字化模拟,此模型包括规则网络和不规则三角网(TIN)两种结构,其中规则格网结构适用于简单地表三维模拟,难以表达复杂地形。针对堰塞湖三维场景中形状复杂堆积体的精细化模拟,通常需要采用TIN结构,该结构通过不规则分布的数据点形成连续三角面,以不同层次的分辨率来描述堰塞湖的地形表面。白格堰塞湖DEM地形图和基于DEM构建的TIN结构几何模型见图2。
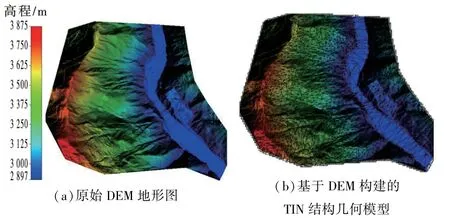
图2 白格堰塞湖DEM地形图与对应的几何模型
(2)模型尺度划分。堰塞湖场景中各区域原始三维模型的表达范围和精度要求不同,需要对模型进行尺度划分,以便有针对性地选取模型构建与管理方法。堰塞湖场景中三维模型的尺度划分见图3。

图3 堰塞湖场景中三维模型的尺度划分
大区域尺度模型包括堰塞湖整个大区域范围,例如所有受到堰塞湖影响的区域地形模型以及虚拟仿真所需要的时序变化模型,构建大区域尺度模型时通常需要在保持一定模拟范围和精度的基础上考虑如何提高构建速度以及渲染速度;局部区域尺度主要针对堰塞湖小范围的精细化场景,例如堰塞湖本身所在区域,构建局部区域尺度模型时需要重点关注局部区域的高精度、可视化模拟;工程尺度主要针对堰塞体和滑坡体,构建工程尺度模型时主要考虑堆积体高度计算等;部件尺度主要针对滑坡体裂缝、建筑物桥梁等,构建部件尺度模型时需要提高其精细程度。
(3)模型尺度的转换与融合。在三维模型渲染过程中需要对模型的不同尺度进行动态转换与融合,对于TIN结构的三维模型,通常采用尺度收缩和尺度扩张两种手段。具体地,利用边界交换、网格合并、局部重构等方法实现尺度收缩,利用克里金插值、样条函数插值、反距离加权等方法实现尺度扩张。
(4)模型对象管理与组织。堰塞湖三维动态虚拟仿真平台涉及的模型对象包括滑坡体三维地形模型、堰塞体三维几何形态模型、河道模型、房屋设施模型、桥梁模型、河流动态模型等,不同模型的数据源与构建方法差异较大,需要采用一种空间对象组织方法进行模型的快速索引和查询。选用三维空间八叉树方法对堰塞湖三维模型进行管理,空间八叉树是一种用于描述三维空间的树状数据结构,在八叉树结构中如果被划分的体元具有相同的属性,则该体元构成1个叶节点,否则继续对该体元剖分成8个子节点,结合模型的中心位置和三维包围盒的边界范围,按照空间八叉树的层级叶节点对应的空间范围可以对大量的空间模型对象进行快速索引[12]。针对大区域尺度的堰塞湖地形模型,可以按照平面四叉树把模型切分为若干部分,而对于小尺度的模型可直接对模型整体进行八叉树节点计算。
(5)多层次细节(LOD)模型构建。LOD技术是在不影响画面视觉效果的前提下,通过逐次简化景物的表面细节来减少场景的几何复杂性,从而加快堰塞体三维场景的渲染速度。白格堰塞湖发生后上游淹没区长度达60 km,下游淹没区长度超过700 km,在进行区域地形模型的三维可视化渲染时,根据视点与模型的距离自动计算LOD级别并进行画面裁剪,使浏览过程中固定视口范围内的内存模型大小接近,有效地协调画面连续性与模型分辨率的关系[13]。
4 堰塞湖三维静态模型构建方法
4.1 大区域尺度三维模型构建
对于堰塞湖抢险救灾而言,堰塞湖大区域尺度三维模型构建过程中实地精细化测量的时效性较差,无法满足实际需要。随着遥感技术的快速发展,利用光学遥感卫星、雷达卫星、固定翼无人机等可以快速得到高分辨率时序遥感数据,其中光学遥感卫星技术的分辨率可以达到0.5 m,无人机可以达到厘米级精度,通过此类技术得到的数据结构是规则格网结构,适用于对数据的快速计算与分析,因此以上技术可作为堰塞湖抢险救灾中主要的数据感知技术。根据采用的不同技术把构建的堰塞湖大区域尺度三维模型分为无人机倾斜摄影模型、基于卫星遥感影像和DEM的三维模型、基于LiDAR的三维模型[14]。
(1)无人机倾斜摄影模型。根据无人机光学镜头快速获取高山峡谷区的倾斜摄影图片,利用Open⁃DroneMap等内业解算方法对图片进行空三计算,从而构建无人机倾斜摄影模型,再采用LOD技术对无人机倾斜摄影模型进行渲染可以得到三维LOD模型。
(2)基于卫星遥感影像和DEM的三维模型。大江大河中形成的堰塞湖影响范围往往有几百公里,与无人机方法相比,在有限的抢险时间内利用已有的卫星遥感数据更有利于提高抢险效率。同时基于地形数据和影像数据通过高程映射和纹理映射可快速构建出大区域尺度三维地形模型,在浏览过程中利用栅格金字塔或者远程瓦片调用LOD模型,可实现模型的快速渲染和浏览。
(3)基于LiDAR的三维模型。相比无人机倾斜摄影模型在高程测量精度上的不足,三维激光扫描仪具有垂直精度高、测程长和稳定性高的特点,特别适合对边坡或者滑坡体进行数据采集,从而快速得到高精度的地形数据。采用无人机LiDAR进行建模时更具优势,由LiDAR获取的数据是点云数据,基于点云数据可以直接生成高精度的DEM。
4.2 局部区域尺度三维模型构建
精细化的局部区域尺度三维模型包括堰塞体堆积体模型、坝体模型、溃坝后的残留体模型等,这些模型是基于LiDAR点云数据、遥感地形数据结合具体参数构建的高精度模型。把不同局部区域的模型整体分为两类:一是利用三维激光扫描仪、无人机倾斜摄影等方法得到的高精度三维LOD模型,与大区域尺度三维模型相比,此类模型层级更多更细;二是三维曲面模型,主要是结合模型几何形态参数进行模拟分析,首先确定堰塞体的基本几何形态,主要包括坡比、坝顶高程等参数,再基于堰塞体的基本几何形态和精细化的DEM地形表面进行求交和封闭得到完整的堰塞体三维模型,用于预测分析二次滑坡形成的堰塞体方量和堰顶高程等。
5 堰塞湖三维动态虚拟仿真方法
5.1 时序动态事件仿真模型构建
堰塞湖的动态事件指滑坡体滑落过程、河流上涨过程、堰塞湖溃坝过程、堰塞湖上游淹没过程等,根据不同时间点的场景状态创建对应的三维静态模型,对不同时间段的卫星影像和地形数据进行时间关联形成时序数据,基于时序数据对多个连续的LOD化的三维静态模型进行帧动画播放,实现对时序动态事件的仿真模拟。白格堰塞湖场景三维仿真模拟见图4。

图4 白格堰塞湖场景三维仿真模拟
5.2 大区域河流动态虚拟仿真
通常采用基于一维洪水演进模型的大区域河流三维模拟方法实现大区域河流动态虚拟仿真。首先根据大区域河流的中心线、河流两侧的山脊线以及河流所在区域的DEM数据计算得到河流的实际范围以及流程函数,根据流程函数计算的河道位置以及高程落差创建多个相邻的河道三维断面。然后采用一维圣维南方程计算得到任意断面不同时刻的水位,根据水位迭代连接相邻2个断面和河流两侧的山脊线形成河面分段多边形,对河面分段多边形均匀插入内部节点,从而构建闭环的河流三角网曲面。最后采用动态纹理映射方法对洪水的水流方向进行模拟,根据模拟的洪水演进时间序列进行重复迭代,从而完成连续时间段内的大区域河流三维模拟。采用以上方法把一维洪水演进的结果快速转换为三维形式的虚拟仿真,解决了对大区域河流进行动态模拟时可视化渲染方法复杂和速度慢的问题,对大区域范围内洪水灾害的抢险救灾具有重要意义。白格堰塞湖大区域河流动态虚拟仿真效果见图5。

图5 白格堰塞湖大区域河流动态虚拟仿真效果
5.3 堰塞体动态虚拟仿真
堰塞体动态虚拟仿真主要针对2个过程:一是滑坡体滑落形成堰塞体的过程,二是进行应急抢险时对堰塞体的开挖过程。针对第1个过程的模拟,主要是根据不同时刻的滑坡体和河谷的DEM、DOM数据精确追踪堰塞体的形成过程,按照时间轴进行动画切换来实现动态可视化模拟,模拟的关键时间点主要包括滑坡体形变前、堰塞体形成后以及堰塞体险情解除后等。针对第2个过程的模拟,需要先确定堰塞体的几何形态参数,具体参数包括坝顶高程、上下游坡比、开挖体积、开挖范围等,再根据相关参数构建堰塞体的三维模型形状,最后根据设定参数的变化实现对堰塞体开挖过程的动态虚拟仿真。堰塞体开挖前的三维场景效果见图6(其中颜色高亮部分为堰塞体开挖前的三维几何模型)。

图6 堰塞体开挖前的三维场景效果和三维几何模型
6 堰塞湖三维动态虚拟仿真平台设计与实现
以白格堰塞湖为例,研发多种实时数据接入的堰塞湖三维动态虚拟仿真平台,平台架构见图7,平台主页面见图8。该平台包括感知数据层、数据资源层、核心支撑层、专业分析层、软件功能层5个层级,实现数据存储、三维建模、三维可视化与应用等多种功能。其中:感知数据层主要对多源异构空间数据进行接入与融合;数据资源层主要提供数据存储和共享服务功能;核心支撑层提供三维数据模型的构建与管理方法;专业分析层主要基于三维数字地球核心组件实现三维动态建模和专业分析计算功能;软件功能层包括所有的业务功能,实现堰塞湖应急抢险时模型快速构建与应用的目标。

图7 堰塞湖三维动态虚拟仿真平台架构

图8 堰塞湖三维动态虚拟仿真平台主页面
在白格堰塞湖三维动态虚拟仿真平台中基于10 m分辨率的DEM数据和1 m分辨率的DOM数据可以构建大区域尺度三维模型,利用无人机LiDAR的10 cm点云数据可以构建堰塞体、滑坡体三维模型,通过三维空间八叉树方法实现多尺度和精细尺度的三维模型的动态调度。除此之外,基于此平台还实现了对堰塞湖的风险评估功能,见图9。

图9 堰塞湖三维动态虚拟仿真平台的风险评估功能
7 结 语
本文确定适用于堰塞湖多源异构空间数据的种类和特点,提出了堰塞湖多尺度三维数据模型设计方法,实现了堰塞湖大区域尺度和局部区域尺度的三维模型快速重构,通过提出的时序动态事件仿真模拟方法实现了对大区域河流演进过程以及堰塞体形成过程和开挖过程的虚拟仿真。基于上述方法构建了堰塞湖三维动态虚拟仿真平台,以白格堰塞湖为例,验证了该平台的适用性。
堰塞湖三维动态虚拟仿真平台的应用验证需要在实际堰塞湖抢险案例下进行,而堰塞湖的发生是偶然事件,处置时间较短,只能用已有案例的实测数据进行测试,这在客观上为堰塞湖三维平台的应用和研发提出了较高要求,因此后续需在堰塞湖抢险过程中多次应用,才能提升平台的应用价值。
猜你喜欢
水利水电快报(2023年1期)2023-01-18
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
英语文摘(2020年8期)2020-09-21
环球慈善(2019年6期)2019-09-25
水利水电快报(2019年5期)2019-09-10
太空探索(2016年5期)2016-07-12
时代英语·高三(2014年5期)2014-08-26