
含四杆机构单元的重载转运机器人构型综合
2023-02-27 12:40王东宝寇子明
机械设计与制造 2023年2期
王东宝,张 静,吴 娟,寇子明
(1.太原理工大学机械与运载工程学院,山西 太原 030024;2.山西省矿山流体控制工程技术研究中心,山西 太原 030024;3.矿山流体控制国家地方联合工程实验室,山西 太原 030024)
1 引言
重载转运机器人在机械工程建设中起着非常重要的作用,主要应用于大型货车、汽车加工制造、仓库储存以及运输、码垛、搬运等诸多领域,一般具有(4~6)个自由度[1~2]。
重载转运机器人存在结构形式单一、转运范围局限大等问题,因此进行重载机构构型综合的研究至关重要。机构拓扑创新是机械发明中最具挑战性和发明性的核心内容[3],型综合是机构创新的有效手段。在重载机器构型综合方面,文献[4]分析研究了现有装载机工作装置的工作原理和结构特点,确定拓扑胚图中的功能构件,提出可控装载机构择优准则,得到其最佳构型。文献[5]提出了可控装载机构优选原则,对拓扑图特定化方案进行优选和具体化,优选了11种可控装载机构。文献[6]对传统挖掘机的结构特点和工作性能进行分析,提出了挖掘机构拓扑图功能性判定准则,从拓扑图中获得最佳构型。文献[7]根据运动链闭合法的理论,对码垛机器人的构型进行分析,在保证正常工作自由度的情况下,绘制了运动链形式的拓扑图,提出优选方案,根据码垛机器人的工作特点对构型进行改进,得到了一种新型可控码垛机器人。文献[8]基于拓扑胚图,运用一定的规则将2度点插入到拓扑胚图中,提出同构和消极子链判别方法,得到胚图对应的拓扑图。
这里基于图论[9],利用胚图插点法[10-11]得到平面七杆和九杆机构的拓扑图和运动链,根据重载转运机器人机构中的四杆机构单元和功能构件,对拓扑图进行特定化标记,并提出优选条件和筛选新构型,通过仿真软件对一种新构型进行分析,得到机构末端运动轨迹图,从而验证重载转运机构构型综合的合理性。
2 含四杆机构单元的转运机构
含一个四杆机构单元的3自由度重载堆垛机器人机械臂机构简图[12],如图1所示。简图为九杆机构。CDEG构成一个四杆机构单元,GH、AB为驱动杆,HF为移动副,DE为末端执行器连接杆,GHF形成三角支架加强机构整体强度。
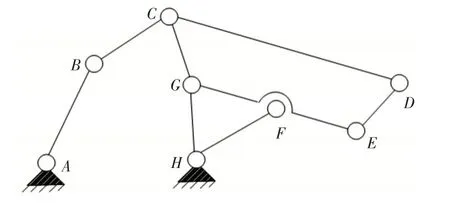
图1 含有一个四杆单元的堆垛机械臂Fig.1 Stacking Robot Arm with A Four-bar Unit
含两个四杆机构单元的2 自由度四轴搬运机器人机构简图[13],如图2所示。简图为七杆机构。ABCD、CEFG构成两个四杆机构单元,AC为大臂,BD为驱动杆,GF为末端执行器连接杆,DCE为三脚架加强机构强度。
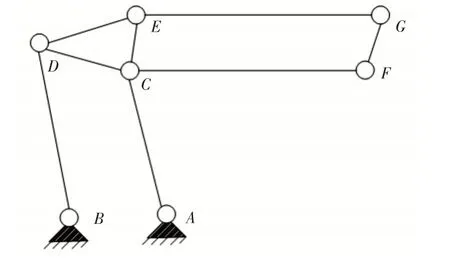
图2 含有两个四杆单元的搬运机器人Fig.2 Handling Robot with Two Four-bar Units
含三个四杆机构单元的2自由度四关节型码垛机器人机构简图[14],如图3所示。简图为九杆机构。ABCD、AEFD、DGHL构成三个四杆机构单元,AD为大臂,AE、BC为驱动杆,LH为末端执行器连接杆,该机构有灵活性高、承载能力大等特点。
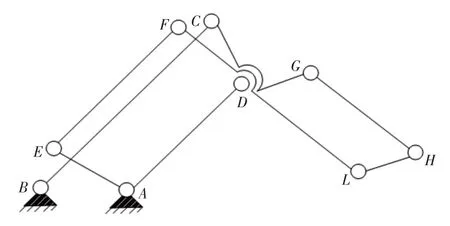
图3 含有三个四杆单元的码垛机器人Fig.3 Palletizing Robot with Three Four-bar Units
含四个四杆机构单元的2自由度码垛机器人机构简图[15],如图4所示。简图为十二杆机构。ABCD、AEFG、DHIG、GJLK构成四个四杆机构单元,AD为大臂,EM、CB为驱动杆,LK为末端执行器连接杆,IGJ构成三角支架,用于连接杆件和支撑机构强度。
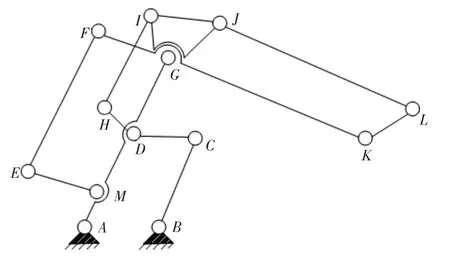
图4 含有四个四杆单元的码垛机器人Fig.4 Palletizing Robot with Four-bar Units
由图1~图4可知,机构简图中2自由度、七杆、九杆居多,均含四杆机构单元用于提高机构灵活性,多含二副杆或三脚架用于增大机构整体强度,其机构特点为重载转运机构构型综合优选方面提供了重要条件。
3 平面二自由度机构综合
3.1 杆件组合方案
将自由度为4的重载转运机构去除末端执行器处局部自由度和根部回转自由度,总自由度为2。为提高转运工作的灵活性和承载能力,要求机构综合时至少含有一个四杆机构单元,为使机器人可靠性提高和降低损耗,各个构件之间应避免使用移动副,用传动效率高的转动副代替。
根据平面机构自由度计算公式[16]:
式中:F—自由度;N—构件总数;PL—低副总数。
得:
为保证各个参数均为整数,故当构件总数N=5、7、9时,低副总数PL=5、8、11。
重载转运机构拓扑结构中所含回路数L为:
机构中某一构件的运动副数i与构件总数N的关系为:
运动链中所含构件总数为:
式中:Ni—i个运动副的构件数。
由于重载转运机构连接方式均为低副,因此运动链所含低副总数PL与各构件所含运动副之间关系为:
将式(5)、式(6)代入式(1),整理可得:
由重载转运机构特点可知转运机构构件数七杆和九杆居多,现根据式(3)~式(7),对重载转运机构N=7和N=9的运动链进行杆件组合。
(1)当N=7 时,低副数PL=8,i≤4,计算得,i可取3 或4,当i=3时,N2=5,N3=2,N4=0,N5=0;当i=4时,N2=6,N3=0,N4=1,N5=0。
(2)当N=9 时,低副PL=11,i≤5,计算得,i可取3、4、5,当i=3时,N2=5,N3=4,N4=0,N5=0;当i=4时,有两种情况:第一种情况为N2=6,N3=2,N4=1,N5=0,第二种情况为N2=7,N3=0,N4=2,N5=0;当i=5时,N2=7,N3=1,N4=0,N5=1。
综上所述,杆件数为7和9的平面连杆机构对应的杆件组合方案,如表1所示。
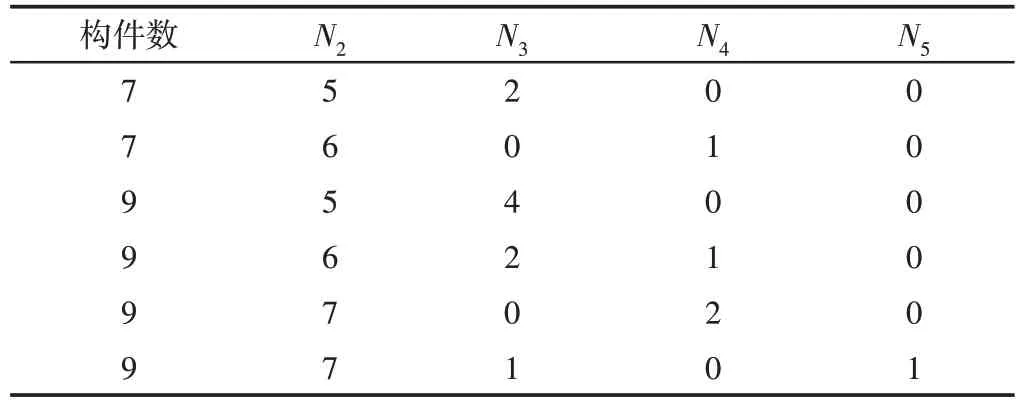
表1 七杆、九杆各杆件组合方案Tab.1 The Combination Plan of Each Member of the Seven-Bar and Nine-Bar
3.2 基于胚图插点法的七杆、九杆机构综合
在杆件综合过程中,根据杆件组合方案,利用图论得到拓扑胚图,以此为基础,根据构件数和二副杆个数,将N2个二度点插入胚图支路中,得到对应的拓扑图,去掉同构类型和消极子链的拓扑图,得到完整的拓扑图。为直观表示机构简图,需将拓扑图转换成运动链,运动链中,线表示机构中的构件,点表示运动副。
3.2.1 七杆八副机构综合
平面七杆杆件组合得到两种方案:N2=5,N3=2,N4=0、N5=0和N2=6,N3=0,N4=1,N5=0分别对应表2拓扑胚图1和2。
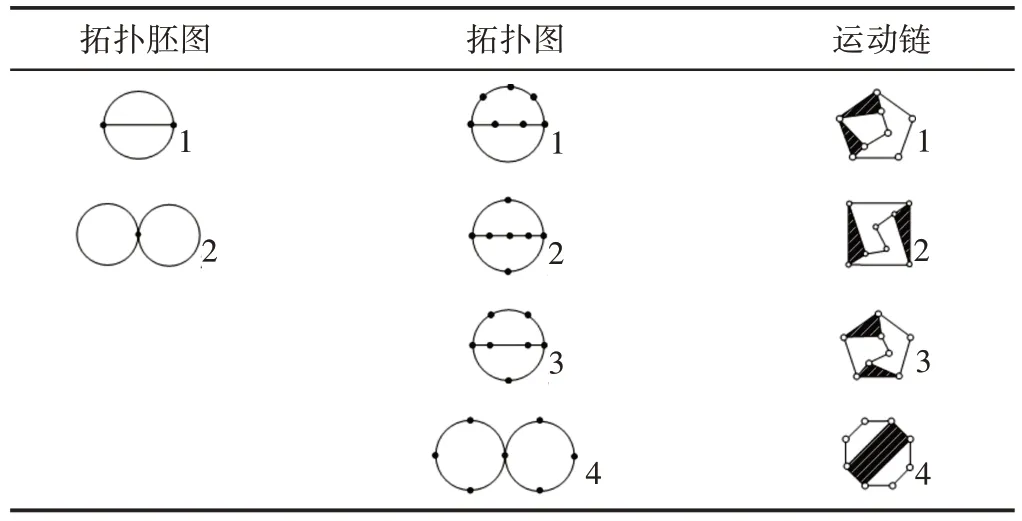
表2 七杆八副拓扑胚图、拓扑图、运动链Tab.2 Topological Embryo Diagram,Topological Diagram and Kinematic Chain of Seven Bars and Eight Pairs
将二度点插入胚图支路中共得到4种拓扑图,将拓扑图转换成对应运动链,如表2所示。
3.2.2 九杆十一副机构综合
平面九杆杆件组合得到四种方案:N2=5,N3=4,N4=0,N5=0;N2=6,N3=2,N4=1,N5=0;N2=7,N3=0,N4=2,N5=0和N2=7,N3=1,N4=0,N5=1分别对应表3拓扑胚图1~2、3~4、5和6。
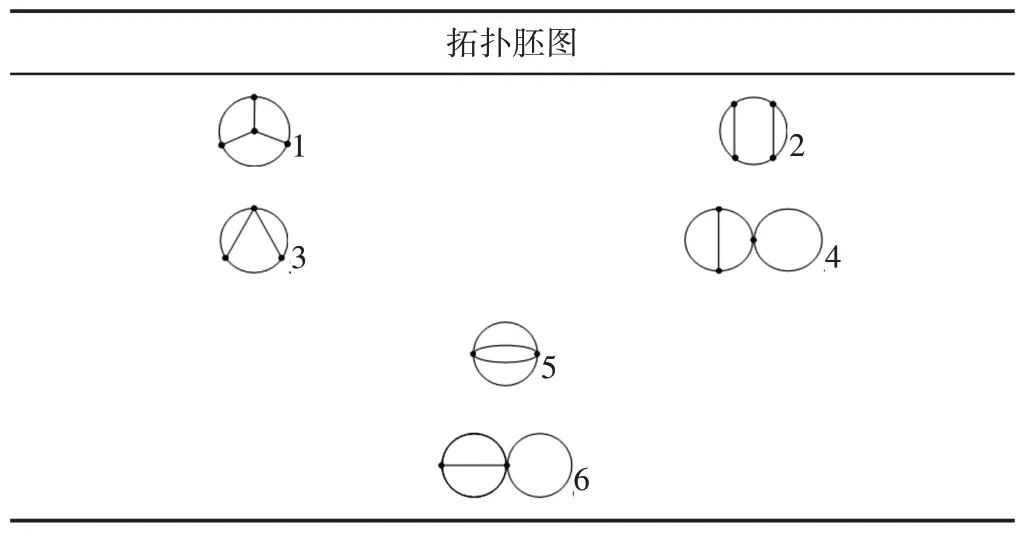
表3 九杆十一副拓扑胚图Tab.3 Topological Embryo Map of Nine Bars and Eleven Pairs
将九杆十一副机构进行综合共得到46种拓扑图,见表4,将拓扑图转换成对应的运动链,如表5所示。
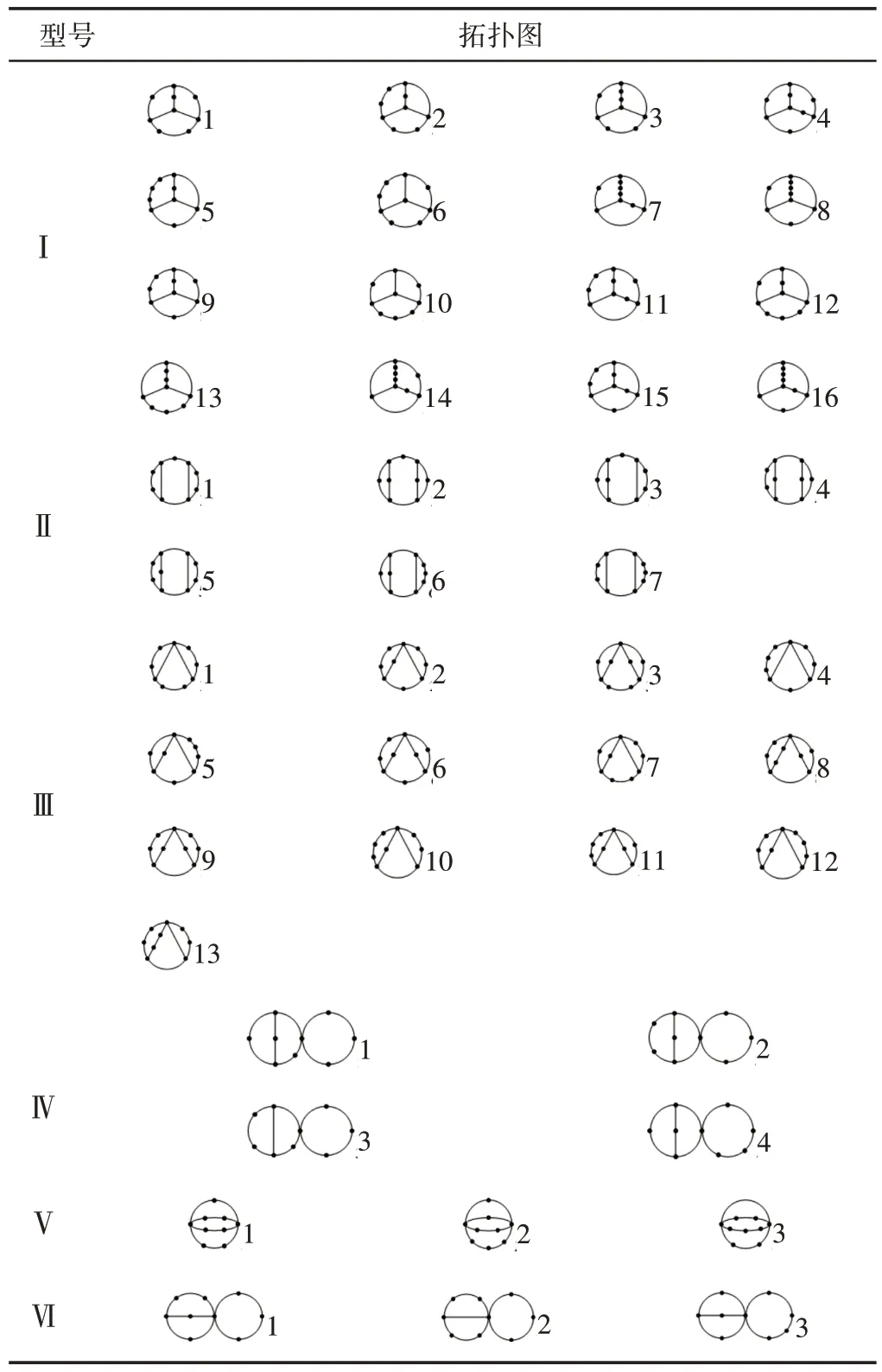
表4 九杆十一副拓扑图Tab.4 Topological Diagram of Nine Poles and Eleven Pairs
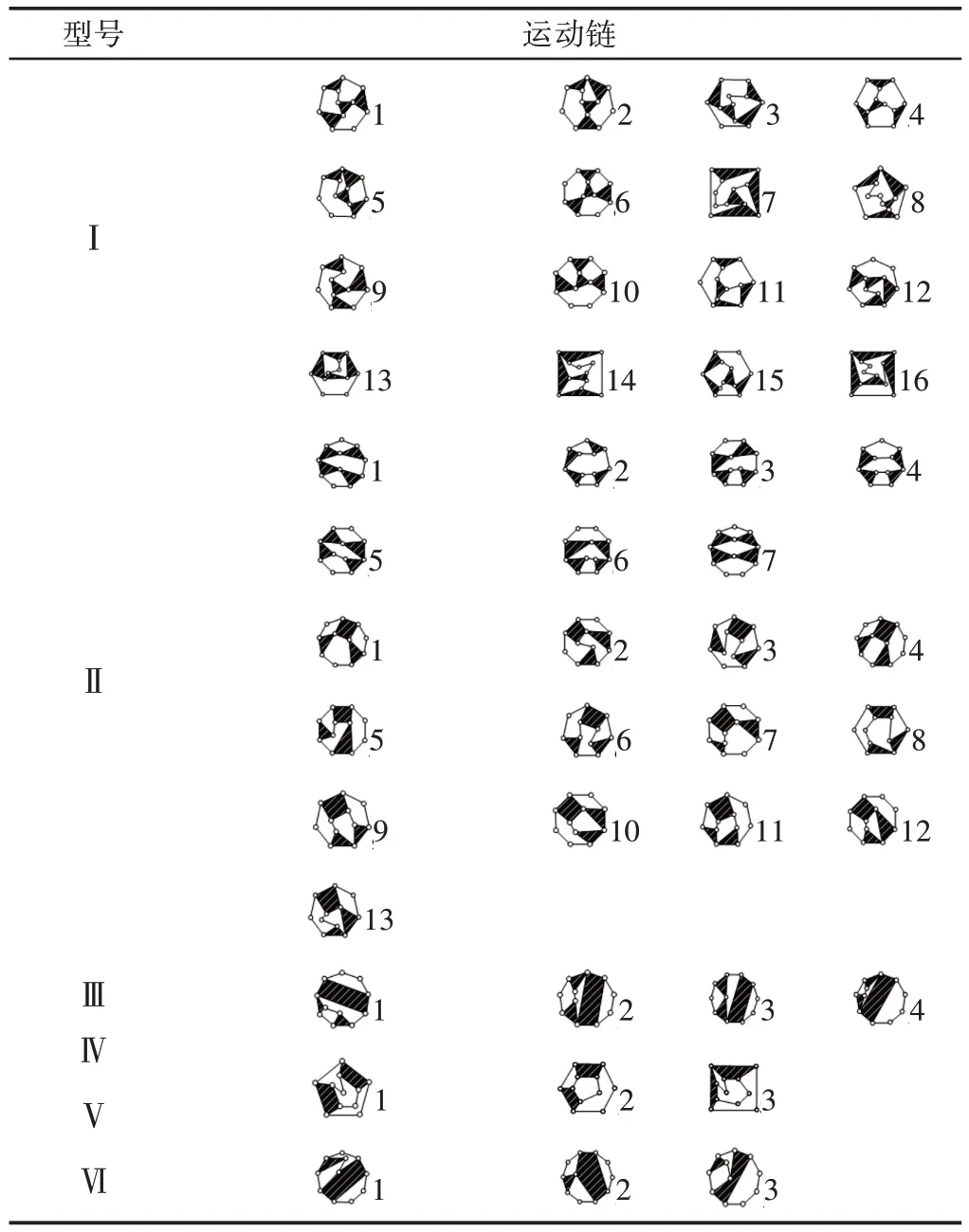
表5 九杆十一副运动链Tab.5 Nine Poles and Eleven Pairs of Sports Chains
通过对平面七杆、九杆机构进行构型综合,得到50种拓扑图及对应的运动链,其中七杆机构4种,九杆机构46种。对于50种拓扑图,并非每种拓扑图均满足重载转运机构要求,也并非一种拓扑图对应一种转运机构,为获取满足重载转运机构需要的拓扑图,现根据转运机构结构特点及功能构件,对其进行筛选。
4 工作装置的构型要求及优选
4.1 工作装置构型要求及特定化方案
拓扑图中是否满足重载转运机器人所需功能性要求是拓扑构型优选的基本条件。拓扑图功能点:在拓扑图中,代表必要不可少且决定了机构功能完整性的构件的点被称为拓扑图的功能点。拓扑图非功能点:在拓扑图中,除功能点以外的代表机构连杆等构件的点,被称为拓扑图的非功能点[6]。重载转运机构功能构件为机架、末端执行器、大臂、驱动杆,现基于机构中的四杆机构单元和功能构件,对重载转运机器人构型提出如下要求:
4.1.1 四杆机构单元
为提高机构整体灵活性,要求杆件中至少含有一个四杆机构单元,该四杆机构可位于机架端、也可位于末端执行器处。
4.1.2 机架
作为重载转运机构,为减小机构转动惯量,保证动态性能,优先考虑将驱动安装在机架上,因此,机架与两个驱动杆和大臂相连,机架构件所含运动副i≥3。
4.1.3 末端执行器
重载转运机器人末端执行器构件应为二副构件,要使末端执行器二副构件具有足够大的活动范围,则二副构件不能直接与机架相连。
4.1.4 大臂
重载转运机器人大臂是确定机器人位姿的中间环节,应安装在机架上,机架至少连接三个构件,其中一个构件代表大臂,另外两个构件代表驱动杆或驱动连杆。
4.1.5 支撑杆件
根据重载转运机构结构特点,为增强机构整体稳定性、避免转动惯量过大,要求杆件不易过长,且机构中至少含有一个二副杆或三副杆作为支撑构件。对表2七杆八副和表4九杆十一副拓扑图进行综合,共筛选出满足重载转运机器人要求的拓扑图33种,如表6所示。其中,七杆八副2种,九杆十一副31种。机构特定化的目的是在满足一定的设计要求的条件下,从一般化运动链图谱中,指定构件和运动副的具体类型,获得能够满足设计要求的可行机构运动链形式[17-18]。现通过拓扑图特定化,将拓扑图按重载转运机器人机构功能点进行标记,确定42种特定化方案,如表6所示。其中,七杆八副共2 种,九杆十一副共40 种。在特定化标记时,表中符号A.B.C.DE,A代表机架功能点,B代表末端执行器功能点,C代表大臂功能点,DE代表两个驱动杆功能点。

表6 拓扑图及特定化标记Tab.6 Topological Diagram and Specific Marking
4.2 构型优选
对表6优选前要根据机器人末端执行机构自由度以及运动链简图特点,提出两个评定条件:
4.2.1 末端执行器自由度为2
末端执行器作为重载转运机器人的执行构件,应满足末端执行器稳定性强、灵活度高的要求,除了末端执行器不能与机架直接相连外,还要满足与末端执行器形成的闭环机构或与执行器所连机构和机架形成的闭环机构可实现平面2自由度运动。
4.2.2 运动链最简
为降低重载转运机器人的制造成本,在可完成工作要求的前提下,优先考虑使用杆件较少的运动链作为主构型。
根据以上条件,对表6重载转运机器人特定化方案进行构型优选,得到6种最佳构型方案,将其转换成机构简图,如表7所示。
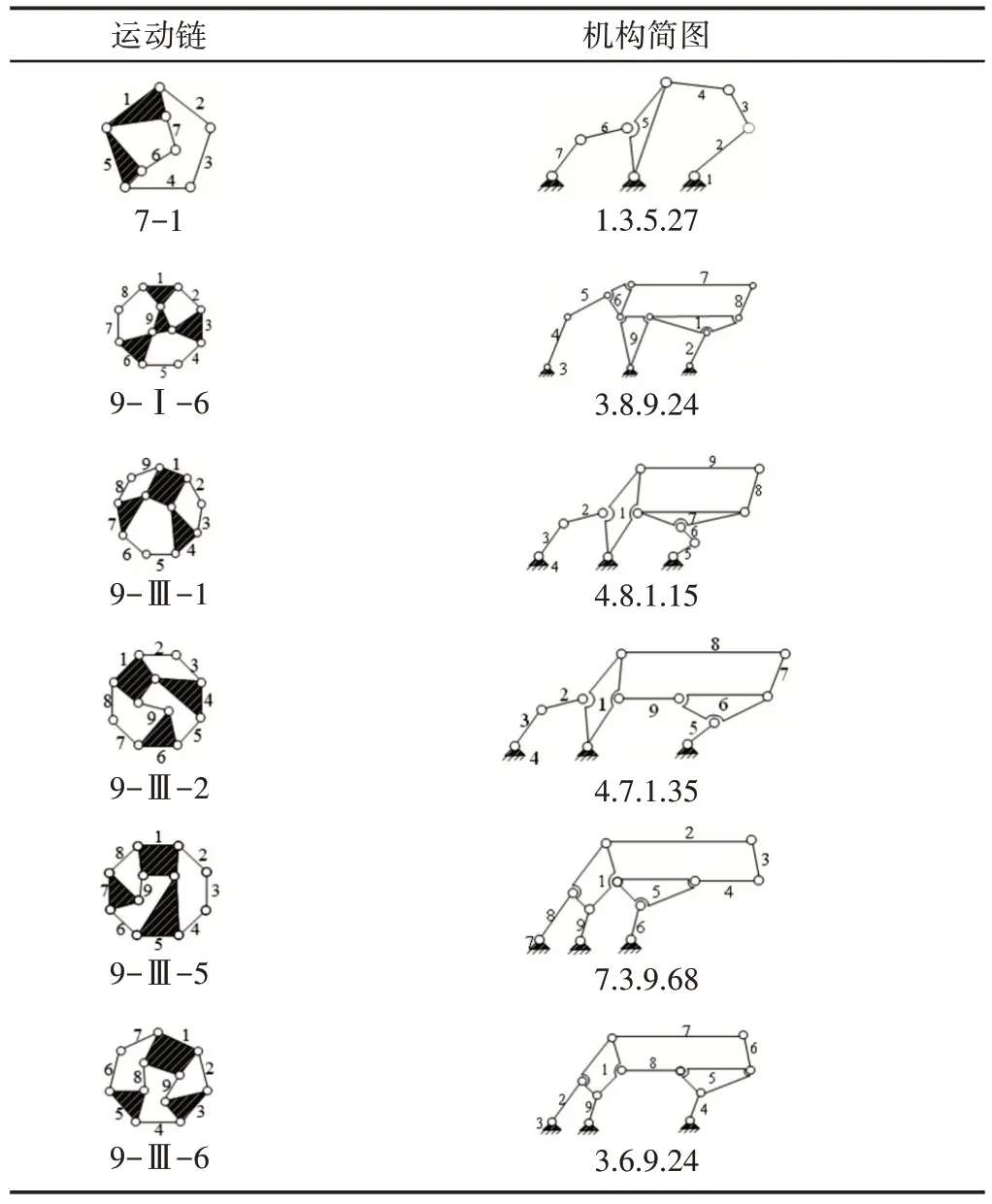
表7 最佳重载转运机构综合Tab.7 Best Institutions Comprehensive
5 优选机构运动学分析
为验证重载转运机器人构型的可行性,现从表7 中选取9-Ⅲ-1机构,将机构进行标记,水平方向为x轴,竖直方向为y轴,对杆长进行初步设计,利用Pro/E 软件进行建模,如图5 所示。其中,主要杆件参数为:AO=BC=80mm,OE=288mm,HF=300mm,ED=342mm,DF=111mm。设置杆件1和杆件5为驱动构件,运用Adams软件对机构进行运动学分析,得到D点的运动轨迹图,如图5所示。为求得机构在xoy平面的运动范围,将驱动杆件1和杆件5设置速度大小比例,最大比例为4:1,最小比例1:1,速度单位为rad/s。由图6可知机构在水平方向x轴可实现约140mm远距离抓取,在竖直方向y轴可实现约170mm大范围俯仰,该结果验证了构型设计的合理性。
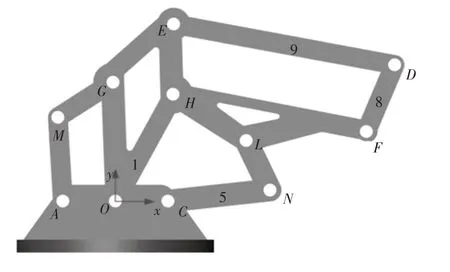
图5 九杆优选机构模型Fig.5 Nine-Bar Optimal Mechanism Model
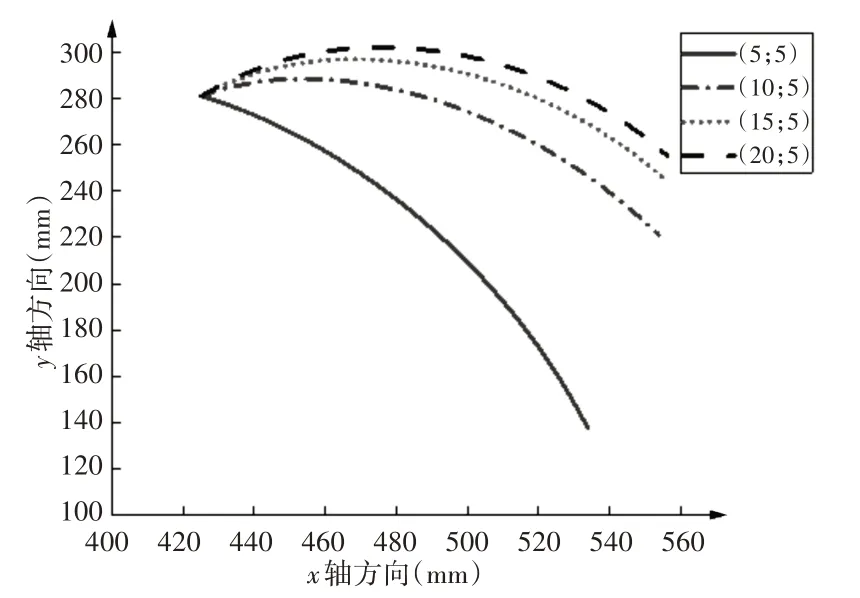
图6 D点在xoy平面的运动轨迹图Fig.6 The Trajectory Diagram of Point D along the X-axis and Z-axis
6 小结
(1)对重载转运机器人结构简图进行分析,确定重载转运机构平面工作时所需的自由度及结构特点,根据图论对杆件进行分配综合,得到平面七杆、九杆组合方案。(2)利用胚图插点法对平面七杆、九杆机构拓扑胚图进行插点,得到50种拓扑图,其中七杆机构4种,九杆机构46种,将拓扑图转换成对应的运动链,得到构型图谱。(3)根据四杆机构单元及功能构件要求,得到42种特定化方案,将方案进行优选,得到6种具有开发潜力的新构型,最后,利用Adams软件分析了优选出的一种9-Ⅲ-1机构的末端运动轨迹,结果验证了构型设计的合理性。
猜你喜欢
电子设计工程(2023年2期)2023-01-24
数学年刊A辑(中文版)(2022年1期)2022-08-20
工程力学(2022年2期)2022-02-11
四川建筑(2021年1期)2021-03-31
建筑机械化(2020年7期)2020-08-15
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2017年9期)2017-11-27
科技创新与品牌(2016年8期)2016-09-29
自动化学报(2016年8期)2016-04-16
