
电动客车再生制动能量回收策略研究
2023-02-27 12:40王维强余天赐严运兵
机械设计与制造 2023年2期
王维强,余天赐,严运兵
(武汉科技大学汽车与交通工程学院,湖北 武汉 430065)
1 引言
由于我国传统燃料汽车保有量的不断增加,造成化石燃料的短缺,环境污染的加重,开发新能源汽车的呼声越来越大。纯电动汽车相比于传统的燃油车,具有效率高、零污染、噪声小的优点。在优先发展公共交通的政策下,纯电动公交客车更能适应城市复杂多变的工况,效率更高,更节能,更环保。然而,限于当前电池技术在短时间内难有较大突破,并且在城市工况下,由于频繁的启停,造成大量摩擦产生的能量流失,能量利用率不高。据有效数据统计,大约有(50~65)%的能量消耗在制动下,大大减少了电动汽车的续驶里程[1]。基于此,提出了一种在确保制动安全性和行驶方向稳定性的前提下的复合电源纯电动客车再生制动力分配控制策略,最大限度的回收因制动而损耗的能量,提高能量的利用率。
2 复合电源系统及再生制动结构原理
2.1 复合电源系统
纯电动公交客车复合电源再生制动系统结构主要包括:制动踏板、制动主缸、压力控制装置、再生制动控制器、电机控制器、蓄电池、超级电容、电机、DC/DC转换器等部件组成[2],如图1所示。复合电源系统是由DC/DC转换器与超级电容串联再与蓄电池并联而来的,在制动或减速刹车下长坡时,超级电容回收因制动摩檫而损耗的能量,然后再将超级电容向蓄电池充电,可以有效的减少大电流对电池的冲击,增加电池的寿命。
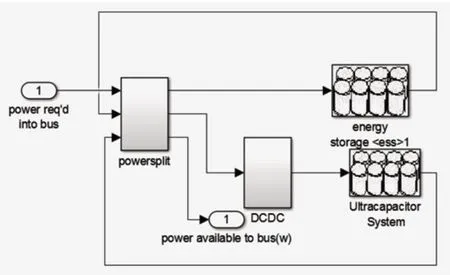
图1 复合电源系统模型Fig.1 Composite Power System Model
2.2 再生制动原理
再生制动原理,如图2所示。当车辆处于制动刹车或减速下长坡时,再生制动控制器收到来自传感器的制动强度的大小、蓄电池的荷电状态、车速等信号,计算得到前后轴的制动力和复合机电制动力,然后,再将分配的结果传递给电机控制器,控制电机进行再生制动能量回收,同时,电机将可再生的制动力矩反馈给电机控制器及压力控制装置,实时调节机电制动力的分配系数,做到闭环制动,达到在保证制动安全与稳定性的前提下,尽可能多的回收因摩擦损耗的能量的目的。
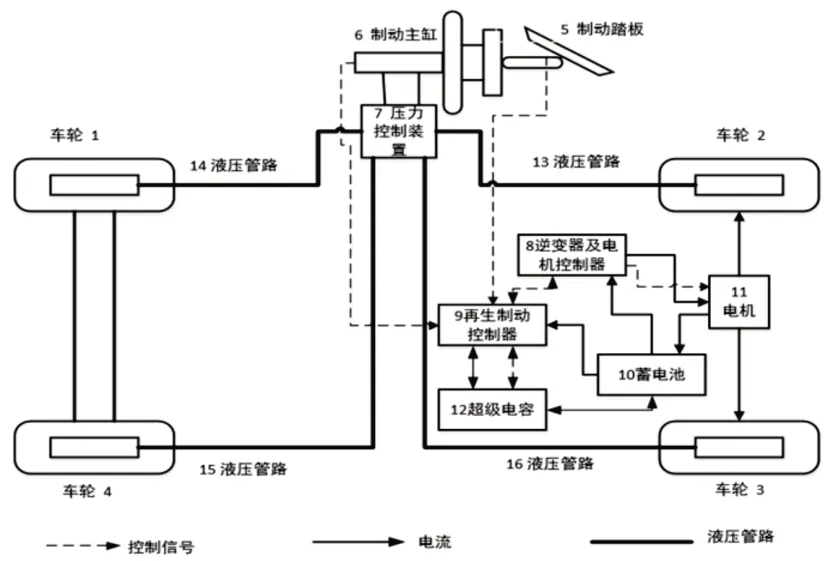
图2 再生制动系统原理图Fig.2 Schematic Diagram of Regenerative Braking System
3 再生制动系统的数学建模
电机模型、电池模型、超级电容模型是再生制动系统的主要数学模型,先对电机、电池、超级电容进行数学建模,再结合这里纯电动公交车具体车型进行电机和电池的选型[3]。
3.1 电机的数学模型
作为车辆动力系统核心的电机,其性能决定了车辆的动力性,这里选用永磁同步电机进行试验,当电机处于驱动状态时,将电能转换为机械能推动车辆,当处于制动状态时,作为发电机将机械能转化成电能并储存在电池中。为使电机处于最佳工作区间,电机应处于最佳输出特性区间,曲线公式为:
式中:Ta—输出转矩;TN—额定转矩;n—电机当前转速;N—额定转速;PN—电机额定功率。
3.2 蓄电池模型
蓄电池容量用来表征蓄电能力,可简化为图3所示的等效电路,由基尔霍夫定律得方程:
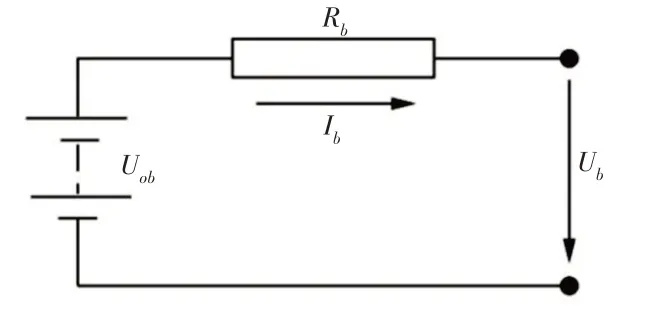
图3 电池等效电路Fig.3 Battery Equivalent Circuit
式中:Uob—电池开路电压;
Ib—充/放电电流;
Rb—电池等效内阻。
电池荷电状态SOC采用安时积分法公式如下:
式中:SOCinit—初始电量;
Qb—已耗电量;
Cp—电池容量。
3.3 超级电容模型
类似于蓄电池,可以将超级电容简化为等效电路,如图4所示。其回路方程表示为:
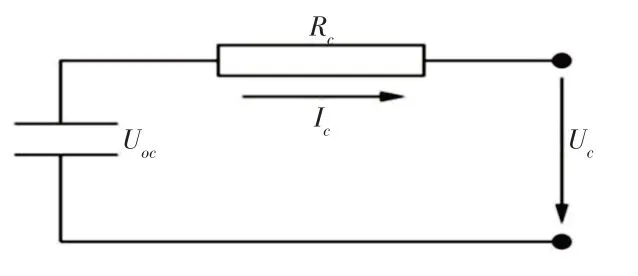
图4 超级电容等效电路Fig.4 Super Capacitor Equivalent Circuit
式中:UOC—超级电容开路电压;Rc—超级电容的等效内阻;Uc—电容端电压。
由于电容器电量与电压呈线性关系,假设电容满电时开路电压为Ucmax,无电时端电压为Ucmin,则电容的SOC的计算公式为:
4 制动力分配策略
在确保制动安全性与行驶方向稳定性的前提下,提出了一种纯电动公交客车的再生制动能量回收控制策略,回收因摩擦而损耗的能量。驱动方式为集中式驱动,如何分配前后轴制动力和机电制动力关系到能量回收的多少。前者影响车辆在制动过程中的安全性和稳定性,后者关系到能量回收的多少,根据制动需求合理分配制动力对于再生制动系统发挥最大效能起着至关重要的作用[4]。
4.1 复合制动系统的模糊控制
复合制动系统的模糊控制策略,在一般的制动条件下,该策略可以提高回馈效率,根据行驶路况,合理分配前后车轮之间的制动转矩,防止在制动时发生的抱死和侧滑现象,实验结果验证,该控制策略的实施可以较大地回收制动能量,提高能量利用率。制动系统的结构,如图5所示。为防止前后轴车轮同时抱死而动态地分配前后轴的制动力,模糊逻辑控制主要基于当前系统的状态和参数,确定再生制动力的大小。
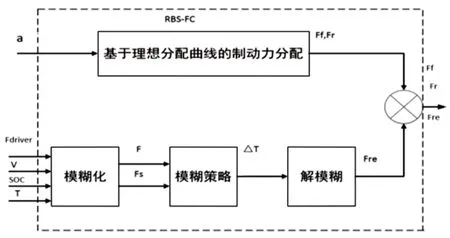
图5 复合制动系统的控制策略图Fig.5 Control Strategy Diagram of Composite Braking System
4.2 前后轴制动力分配
为了避免车辆出现抱死侧滑现象,汽车制动系统的前后轴制动力分配曲线应该始终处于理想的制动力分配曲线之下,为了防止前轴因制动发生抱死而失去转向能力,提高附着效率,β线应靠近I曲线越近越好[5],而理想的制动力分配曲线(I曲线)为:
hg—车辆质心高度;
b—质心至后轴的距离;
L—轴距;
Fbf、Fbr—前、后轴制动力。
在实际中,前后轴制动力按照一定的比例进行分配,且尽量靠近I曲线,分配系数β为[6]:
根据GB12676-2014对客车制动力的要求,在轮胎与路面附着系数在(0.2~0.8)之间时,制动强度应满足z≥0.1+0.85(ϕ-0.2),当Z处于[0.15,0.3]之间时,前轴利用附着系数在ϕ=z±0.8之间,后轴利用附着系数ϕ≤z± 0.8,当z≥0.3时,后轴的利用附着系数曲线满足:z≥0.3+0.74(ϕ-0.38),则认为其制动性满足要求,又因为对于ϕ处于[0.2,0.8]之间的各种车辆而言,要求制动强度满足:z≥0.1+0.85(ϕ-0.2)[7],当ϕ=0.8时,z=0.612。综上可得出公交客车制动力需达到以下要求:
式中:z—车辆制动强度;ϕf ϕr—前后轴利用附着系数。
批判理论视角下的语言教师教育研究………………[美]玛格丽特·霍金斯………………[加]邦尼·诺顿 李奕婷 译(2·5)
代入前后轴利用附着系数化简可得到制动强度z下的制动力分配系数β的关系如下:
式中:a—质心到前轴的距离;
L—轴距;
b—质心到后轴的距离;
hg—质心的高度。
对纯电动公交客车进行制动力分配策略设计,而对于公交客车而言,其最高车速不超过70km/h,且频繁的启动、制动,其最大的制动强度一般小于0.3,综上所述,提出如下的制动力分配策略:当制动强度z<0.2时,由于没有制动国标要求,且电机制动完全满足制动要求,这时,应尽可能大的回收制动能量,采用纯电机制动,当制动强度z>0.2时,按照GB12676-2014对客车制动力要求结合理想制动力分配曲线分配前后轴制动力[8],前后轴制动力分配系数,如图6所示。
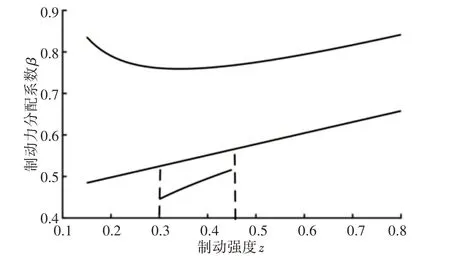
图6 前后轴制动力分配系数Fig.6 Front and Rear Axle Braking Force Distribution Coefficient
4.3 机电复合制动力的分配
再生制动的优点是转矩响应快,控制精度高,为了使制动产生的能量得到最大化回收,必须在确保制动安全性的前提下,尽可能增大再生制动的比例,由于实际再生制动系统受车辆参数、环境等因素的影响较多,而模糊控制不受具体模型的影响,鲁棒性和抗干扰能力强,故采用模糊控制理论分配机械、电机制动力。
4.3.1 模糊控制原理
纯电动公交客车在实际运行中,由于城市复杂多变的运行工况,造成想要建立精确的机电制动力分配模型很困难,故采用模糊控制系统对其进行分配。
4.3.2 模糊控制器的设计
模糊控制器的设计主要包括模糊化、模糊推理、解模糊。这里设计的模糊控制器的输入包含所需制动力、电池SOC、车速,输出为再生制动参与的比例K[8]。集合分为高、中、低,其中制动力的模糊子集为{mfL,mfM,mfH},论域为[0,2000]车速的模糊子集为{mfL,mfM,mfH},论域为[0,70],SOC 的模糊子集为{mfL,mfM,mfH},论域为[0,1]再生制动参与的比例的模糊子集为及其论域为:
模糊控制器采用sugeno型,控制规则是:采用三输入一输出的结构:如果前提1,前提2,前提3,那么得出结论,规则为:驾驶员的制动指令大,则车辆应在较短的时间与距离内停车,应该减少回馈制动力的比例,当指令适中时,回馈比例应该增大,当指令小时,使用大的回馈制动比例;速度低的车辆的回馈制动比例低,速度适中的车辆的比例适当增大,速度较大时的回馈制动比例增加到最大;电池的内阻随着SOC 的增大而减小,减小而增大,当SOC处于(0.1,0.8)时,回馈比例随之变化,SOC大于0.8时,停止回馈制动。综上所述,再生制动控制的流程图,如图7所示。车辆所需制动力由制动踏板时的制动强度z计算得出,依据GB12676-2014对客车制动力的要求,初步分配前后轴制动力,根据制动强度、车速、SOC 等车辆状态[9],协调分配机电复合制动力,机电复合制动力模糊分配模型,如图8所示。
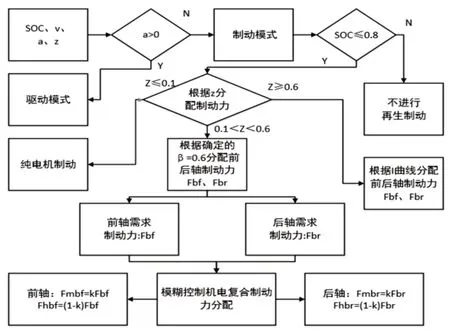
图7 再生制动控制流程图Fig.7 Regenerative Braking Control Flowchart
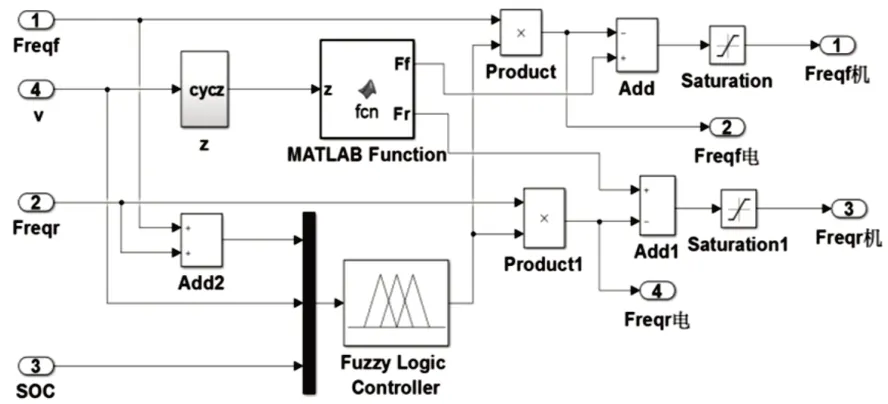
图8 机电制动力模糊分配模型Fig.8 Fuzzy Distribution Model of Electromechanical Braking force
5 再生制动系统仿真实验
ADVISOR是由美国可再生能源实验室NREL通过MATLAB/Simulink软件环境下开发的高级车辆仿真软件,其上层模型[10],如图9所示。
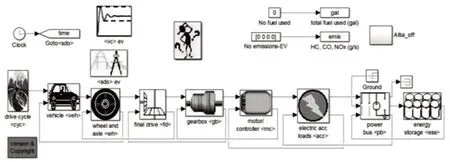
图9 Advisor上层模型Fig.9 Advisor Upper Model
这里对ADVISOR进行了二次开发,通过与MATL AB进行联合仿真,将MATLAB/Simulink 里搭建好的控制策略嵌入ADVISOR中,并修改其相应的m文件,并将中国典型城市循环工况CYC_Chinaurban添加到里面,进行对比仿真验证。
5.1 仿真参数
选择复合中国城市道路情况的典型城市工况CYC_Chinaur‐ban进行对比仿真验证,通过仿真结果考察制动过程中制动力的大小、电池的充电电流和储能系统SOC值等,验证再生制动控制策略,电动客车的基本参数,如表1所示。
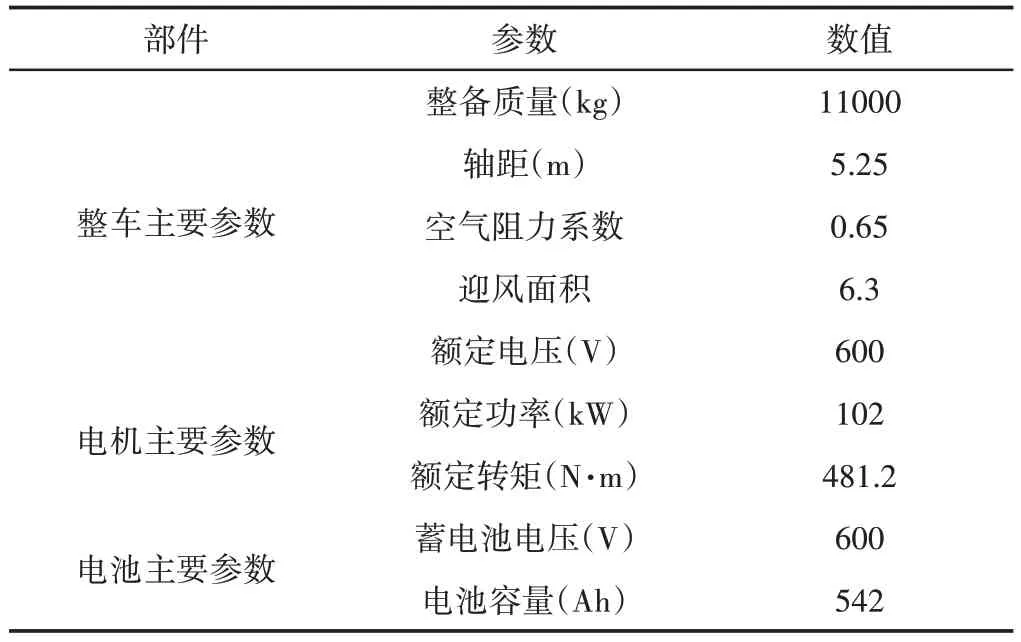
表1 车辆及各部件主要参数Tab.1 The Main Parameters of the Vehicle and its Components
5.2 循环工况仿真及分析
利用advisor软件对这里策略仿真验证,选用复合我国电动公交车城市道路工况CYC_Chinaurban验证,如图10所示。
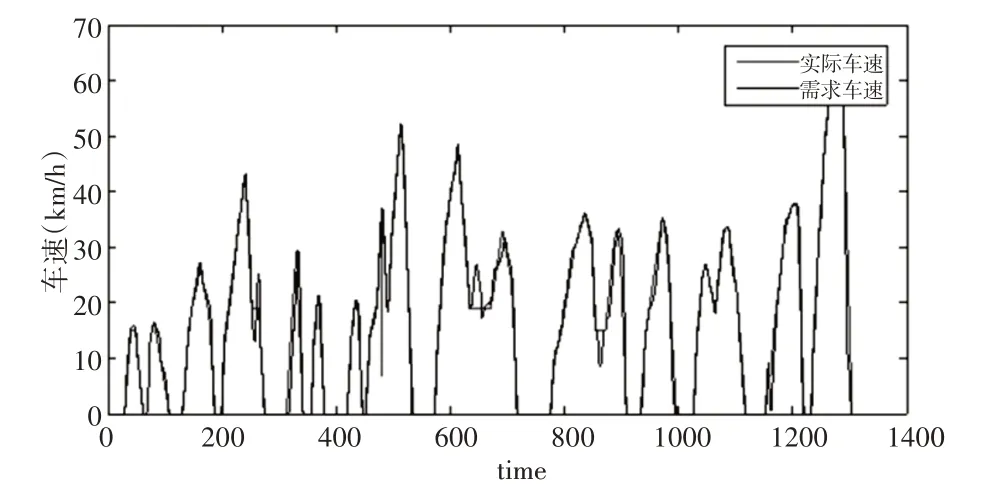
图10 中国典型城市工况车速跟随曲线Fig.10 Speed Curve of Typical Cities in China
电动汽车电机转矩变化曲线和电池电流随时间变化关系,如图11、图12所示。电机转矩为正,电机处于驱动模式,转矩为负时,电机为制动能量回收模式,当车辆的制动强度较小时,处于电机单一制动模式,当制动强度适中时,处于机电复合制动模式,当紧急制动时,处于机械制动模式。
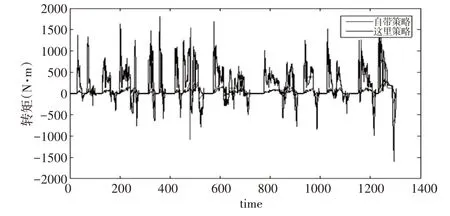
图11 电机转矩变化曲线Fig.11 Motor Torque Curve
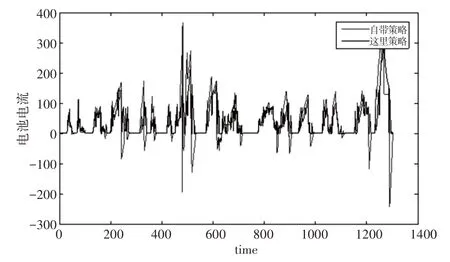
图12 电池电流的变化曲线Fig.12 Change Curve of Battery Current
从图11可以看出,当电机转矩为正时,电机驱动车辆向前行驶,当转矩为负时,电机处于制动能量回收状态,且这里复合电源制动力分配模糊控制策略相较于advisor自带策略电机的制动转矩要大,回收的能量更多。
从图12可以看出复合电源中电池的峰值电流较小,制动工况下复合电源的电池电流基本为0,回收的能量储存在超级电容里,使大电流对电池的冲击得到减少,电池的使用寿命得到提高。
从图13可以看出这里的复合电源再生制动力分配策略相较于advisor自带的单一电源和复合电源策略,电池SOC下降较小。提高了制动能量回收和利用效率,增大了电动汽车的续驶里程。
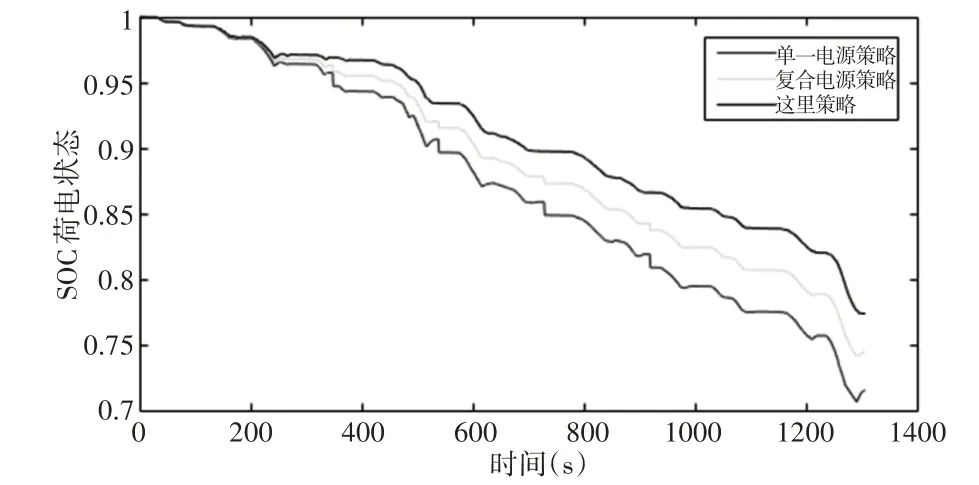
图13 电池SOC对比图Fig.13 Battery SOC Comparison Chart
6 结论
(1)通过分析城市公交客车复杂的运行工况、驾驶员的驾驶习惯,基于模糊控制理论,提出一种适用于城市纯电动公交客车的再生制动力分配策略。设计了以制动力F、车速v、电池SOC为输入,再生制动参与比例K为输出的模糊控制器,在复合我国标准法规和保证制动的安全性及方向的稳定性的前提下,实现能量回收最大化,同时兼具了机电制动的协调性。
(2)对advisor 进行二次开发,搭建了复合电源系统,将mat‐lab/Simulink中搭建的适用于城市公交的再生制动力分配策略替换原策略,选取中国典型城市工况进行仿真验证,仿真结果表明了策略的有效性,能有效地提高能量回收利用率,增大了纯电动公交客车的续驶里程。
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
防爆电机(2021年3期)2021-07-21
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14
汽车观察(2018年10期)2018-11-06
北京汽车(2017年3期)2017-10-14
电子制作(2017年7期)2017-06-05
