UWB技术在隧道施工人员定位中的应用
2023-02-27 04:11苏凯吴伟刘二刚王记涛汤莉莉
中国公路 2023年1期
苏凯 吴伟 刘二刚 王记涛 汤莉莉
(1.河南省公路工程局集团有限公司海外分公司,河南 郑州 450000;2.河南金途科技集团股份有限公司,河南 郑州 450000)
目前高速公路建设过程中应用现代化手段丰富,但隧道的施工环境依然恶劣,隧道开挖区域工作危险系数仍然很高,特别是在最易出现坍塌的“掌子面”。现有的隧道人员定位系统,通常只具备考勤统计和区域定位功能,不能满足人员精准定位及灾后救援的需求;部分产品虽已采用了UWB技术进行人员定位,但定位基站的设计多为传统的“基站内”定位模式,不符合施工现场真实环境需求,如:无法避免由于隧道掌子面前移,而需不断挪动前端定位基站而造成定位功能真空期的问题。基于以上原因,在隧道施工过程中,需要一种真正高效、准确的定位方法,切实解决目前在建隧道安全建设中人员“精准定位”的难题。
一、UWB定位技术在隧道建设中的优势
近年来,出现了超声波视觉定位、Wi-Fi、射频识别、蓝牙等多种无线定位方法和技术,依靠红外线发射或超声波发送后返回视觉信息定位,在某些特定环境情况下,例如商场、办公楼等,能够得到较稳定的定位数据,但在隧道建设领域,由于存在动态施工工序、洞壁潮湿、施工粉尘干扰、洞壁参差不平、掌子面长距离、开挖爆破扰动等各类复杂环境因素的影响,电磁波信号被吸收或多路径干扰环境定位,定位误差大。相比,以脉冲电波到达时间和到达角度为数据定位依据的UWB定位,适合隧道施工环境,隧道洞壁潮湿、粉尘等,均无干扰,可正常工作,定位精度满足隧道内施工定位要求。
二、UWB定位模型
(一)UWB技术特点
UWB通过脉冲无线电工作,它在宽频带上使用一系列脉冲,因此有时也被称为IR-UWB或脉冲无线电UWB。UWB脉冲具有多个适用于封闭、复杂环境实现定位的技术特点。
1.波形特点易于识别 适应复杂环境的信号识别需求
超宽带脉冲信号波峰陡而窄,形状如尖峰,适于在嘈杂的通道环境中被定制设备识别,能够满足有众多机械施工的隧道开挖工作环境。
2.独立频谱 避免信号干扰
UWB定位和测距的脉冲在6.5GHz和8GHz之间的频率范围内工作,远离聚集在2.4GHz周围的繁忙ISM频段,不干扰频谱其他频段发生的无线传输,能够与现有普遍应用的无线形式共存,包括隧道中的无线网桥、Wi-Fi和蓝牙模块等。
3.信号传输距离可控 可实现数据传输
UWB通信还可以携带数据传输,同时,UWB的调制技术包括脉冲位置调制和二进制相移键控,从脉冲频率特点上,解决了批量隧道内人员定位漏检问题、从功率调整方面,也满足隧道施工中从掌子面到二衬台车之间,长危险区域内信号覆盖的问题、从基站到定位标签,脉冲信号到达的时间和到达的角度,解决了精准定位需求的问题。
(二)UWB定位原理
UWB定位技术采用电脉冲到达时间、到达角度和综合算法来进行定位数据获取,在实际应用中,确定两点(如定位基站和定位标签)间水平距离的过程被称为测距。以脉冲到达时间为例,脉冲飞行时间(ToF)被用来测距,利用信号行程时间来计算距离,如图1所示(设备1是定位基站,设备2是定位标签)
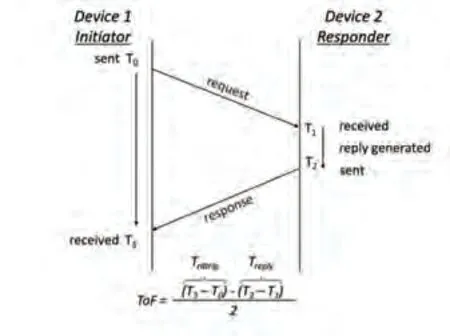
图1 ToF计算系统于UWB设备工作原理
飞行时间(ToF)的计算值来源于测量信号自到达点传输至B点时间的往返时间与设备2的处理时间之差的一半。为便于确定测量信号传输过程中地面的覆盖距离,取ToF与光速的乘积。鉴于UWB的高带宽(500MHz)的特点,UWB以精确至+/-10cm级以内的测距精度远超使用窄带收发器的Wi-Fi和BLE的约+/-1m至+/-5m的粗略数据。UWB精确的测量数据值为隧道人员定位技术奠定了准确的理论基础。
三、UWB技术在隧道施工中的准确应用
隧道内站内定位方式可以实现人员定位,但由于隧道掌子面在不断开挖推进,这就需要不断前移基站定位设备,每次架设基站均需重新校准测量基站的相关参数,且由于受隧道内爆破震动等因素的影响,站内定位基站部署的解决方案不满足在建隧道施工人眼精确定位的需求,无法适应目前隧道安全生产高标准要求的形势。本文提出一种基于基站外定位算法的隧道人员精确定位方案,该方案结合隧道挖掘工程真实环境的实际需求,在不增加既有硬件配置的基础上,不再依赖隧道前端的定位基站,只需在二衬台车上架设固定基站,即可精确地定位基站外的掌子面到二衬台车的每一位人员的纵横坐标(X、Y轴),且在隧道施工过程中,无需移动定位基站,真正体现“可实施、免维护、省工序”的创新特点。
四、基站站外人员定位技术实现方式
在隧道开挖建设中,易出现塌方事故的区域是在“初衬”到“二衬台车”之间,即“二衬台车-开挖台车”之间如图2所示。针对这段最危险的区域,国家根据开挖隧道的地质稳定程度设定了相应的“围岩级别”,并对开挖掌子面到二衬台车的最长距离规范了对应的“安全步距”,规范中最长的安全步距为200m,为满足这样的施工环境和施工工序,该方案即针对开挖台车到二衬台车之前最易出现隧道安全塌方事故的区域,基于“基站外定位算法”实现在此范围内施工人员位置的精准定位。
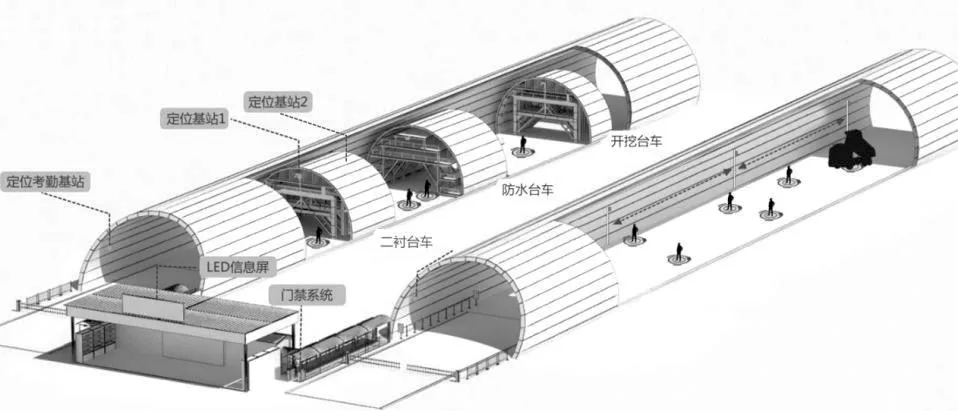
图2 隧道开挖施工现场示意图
以隧道口向开挖面为参考方向,定位基站架设在二衬台车的前后端如图3所示,随着携带UWB定位标签的隧道作业人员在隧道内的位置移动,定位基站基于UWB电脉冲到达定位标签的时间、到达角度的综合算法,同时基于勾股定理“勾三股四玄五”的相对距离,以及两台基站的不同定位距离,即可计算“基站外”精确定位数据,该算法为“基站外定位”奠定了算法基础。该定位方法不受定位标签所在位置的影响,只需接收到两台基站的电脉冲信号并回传,即可计算出该定位标签相对于两台基站的X轴、Y轴的二维坐标数据,该定位算法目前在行业内属创新应用,为隧道开挖施工的人员精确定位带来了革命性的应用方法。
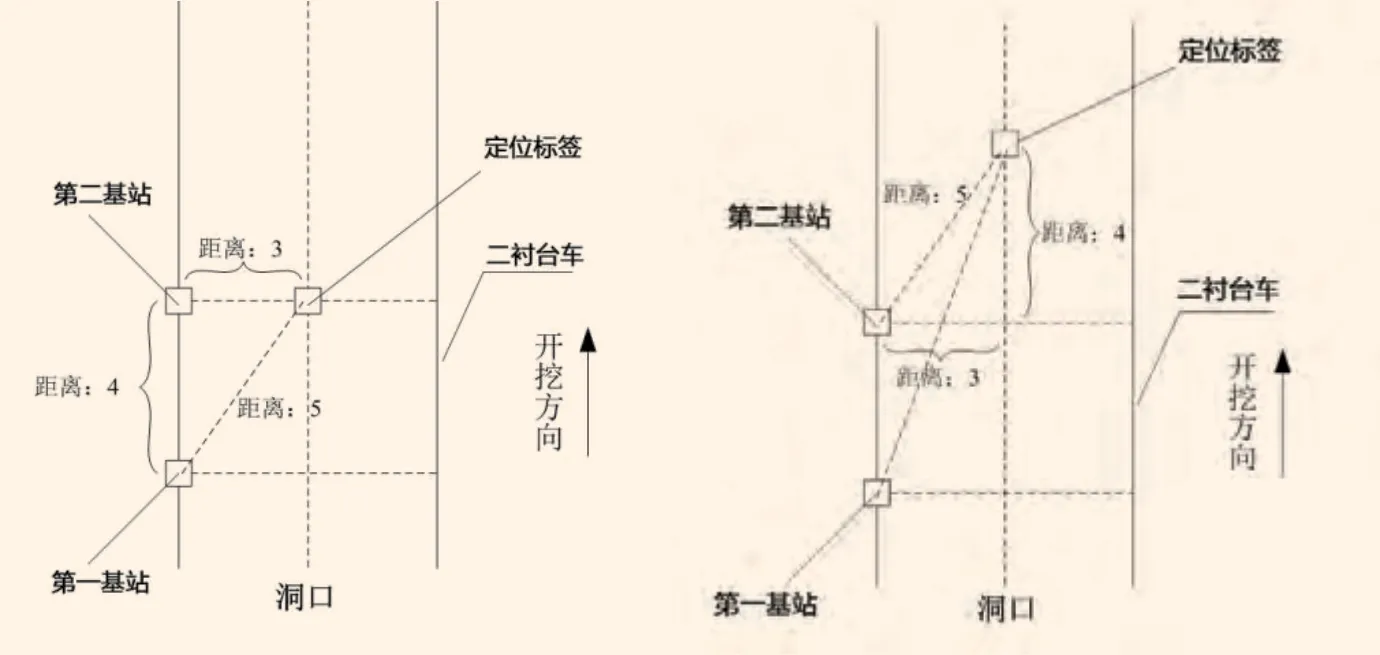
图3 基站外定位算法示意图
五、系统实际应用
本文描述的方案根据隧道内特殊作业环境的需求,重点关注隧道开挖建设中最容易出现垮塌的掌子面,即开挖处到二衬台车这段区域。利用UWB定位技术判定移动用户位置的测量方法和计算方法,在真实隧道定位场景中,已实现在定位距离200m范围内,定位精度误差小于30cm,实现隧道基站外精确定位的创新应用。此外,基于创新基站部署模式及定位算法,在配套开发的隧道人员定位系统中,可基于人员标签动态显示该隧道人员的身份信息、联系方式、具体位置以及工作状态信息等,便于管理人员随时了解隧道内作业人员的分布情况及具体信息。
六、结语
本文阐述了利用UWB的技术特点实现的隧道施工人员定位系统。通过改变基站部署模式,提出了基于该模式的基站外定位算法,结合配套的采集反馈系统,创新构建了一种在建隧道内施工人员定位方法及相应产品,消除了此前同样基于UWB技术的“基站内”定位系统的固有弊端,更加适应隧道内恶劣施工环境对设备运行的严苛要求。“基站外”部署方式仅需前后两个基站便可测得每个标签的二维坐标,进而实现更为精准的人员定位。此外,由于前置基站无需靠近掌子面,远离粉尘泥水噪音恶劣环境,设备可靠性得以极大提高,做到了免维护,为持续采集精确的位置信息并顺利传输提供了保障。作为当下智慧工地创新领域,可为日常隧道施工安全管理,以及灾后营救工作提供最客观、有效的真实数据,并在隧道安全施工中发挥日益重要的作用。

图4 隧道二衬钢筋绑扎
猜你喜欢
山东冶金(2022年2期)2022-08-08
交通科技与管理(2022年8期)2022-05-07
铁道科学与工程学报(2020年10期)2020-11-19
工程与建设(2020年5期)2020-06-05
昆钢科技(2020年6期)2020-03-29
铁道建筑(2019年7期)2019-08-08
中国铁道科学(2019年1期)2019-02-18
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06