完全非弹性碰撞一个结论的妙用
2023-02-27 05:42尚英
高中数理化 2023年2期
尚 英
(山东省青岛第九中学)
完全非弹性碰撞是碰撞中很重要的一种,具有碰撞后共速,且损失动能最多的特点,很多问题中均会涉及.那么损失的动能跟什么有关呢? 这类问题又存在什么规律呢? 在平时学习的过程中,如果我们多思考、多总结,就会发现一些小的结论,可以用来快速解决问题,使复杂的问题简单化.笔者对完全非弹性碰撞中动能的损失做了一些深入的思考,获得了一些感悟,分享给读者.
1 结论的推导
如图1所示,质量为mA的A球以速度vA向右运动,质量为mB的B球以速度vB向右运动,两个小球发生完全非弹性碰撞,碰后两小球以共同的速度向右运动,求系统损失的动能.
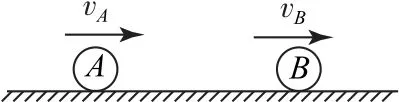
图1
A、B两球组成的系统在碰撞过程中,根据动量守恒定律可得
根据能量守恒定律有
联立解得
将此结果代入式②中,解得
结论完全非弹性碰撞中损失的动能是按照被撞物体质量占总质量的份数进行分配的,即
其中EkAB=为A球相对于B球的动能.
若vB=0,则即为一“动”撞一“静”的情况,则根据上面两个式子可得,碰撞后小球的速度大小
系统损失的动能为
这个结论是由动量守恒定律和能量守恒定律的联立方程组解出来的.如果能够熟练掌握此结论就会在很多题目中从解方程的烦琐计算中解脱出来,起到快速准确得到答案的目的,尤其对于选择题更是方便快捷.
2 结论的应用
例1如图2所示,光滑水平直轨道上有三个滑块A、B、C,质量分别为mA=m,mB=2m,mC=4m,开始时均静止.先让滑块A以初速度v0与滑块B发生碰撞并粘在一起,然后又一起与滑块C发生碰撞并粘在一起,则前后两次碰撞中损失的动能之比为( ).
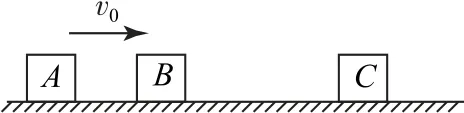
图2
A.1∶4 B.4∶1 C.7∶2 D.2∶7
解析
常规解法取向右方向为正方向,设A、B粘在一起后向右运动的速度为v1,A、B、C粘在一起后向右运动的速度为v2.第一次碰撞过程中,系统的动量守恒,则有mv0=3mv1,解得
由能量守恒定律可得损失的动能
第二次碰撞过程中,系统的动量守恒,则有
损失的动能为
故前后两次碰撞中损失的动能之比
结论法由结论可知
AB碰完以后剩余的动能为
所以第二次碰撞过程中动能的损失
故前后两次碰撞中损失的动能之比
点评
对比两种解法,第一种常规解法,虽然思路清晰,但是两次碰撞,两个动量守恒定律方程,两个能量守恒定律方程,四个方程依次计算求得结果,计算量大,采用结论法直接代入公式很容易求出第一次碰撞损失的动能,剩余的动能等于总动能减去损失的动能,然后再次套入结论,就很快解出来了第二次损失的动能.对比之下,结论法更快捷.
例2如图3所示,位于光滑水平桌面上的小滑块P和Q都可视作质点,P的质量为m,Q的质量为3m,Q与轻质弹簧相连.Q原来静止,P以一定初动能E向Q运动并与弹簧发生碰撞.在整个过程中,弹簧具有的最大弹性势能等于( ).

图3
解析
常规解法设P物体的初速度为v0,由已知可得与Q碰撞过程,两物体速度相等时,弹簧压缩量最大,此时弹性势能最大,整个过程满足动量守恒定律,设共同速度为v1,则
此时最大弹性势能
结论法P、Q速度相同时,弹簧具有的弹性势能最大,其中减少的动能转化为弹簧具有的最大弹性势能,则
点评
完全非弹性碰撞的动能损失的结论可以应用到类完全非弹性碰撞中去,那么损失的动能就可能等于弹簧增加的弹性势能.
例3如图4 所示,质量为m的滑环套在足够长的光滑水平滑杆上,质量为M=3m的小球(可视为质点)通过长为L的轻质细绳与滑环连接.将滑环固定时,给小球一个水平冲量,小球摆起后刚好碰到水平杆;若滑环不固定,仍给小球同样的水平冲量,则小球摆起的最大高度为( ).
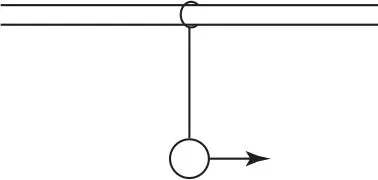
图4
解析
滑环固定时,给小球一个水平冲量,小球摆起后刚好碰到水平杆,可知小球的初动能全部转化为小球的重力势能,即Ek0=mgL;若滑环不固定,仍给小球同样的水平冲量,小球摆起到最大高度的过程,类似完全非弹性碰撞.小球摆到最大高度时,系统损失的动能转化为小球的重力势能,即
完全非弹性碰撞中动能损失的公式,其实是完全非弹性碰撞的进阶学习,熟练掌握此公式一方面可以避免双守恒方程的联立求解的麻烦——尤其是遇到一“动”碰一“动”的情境,解方程更为复杂——掌握此结论就显得较为简便了;另一方面也可以快速解决类完全非弹性碰撞中弹簧的最大弹性势能、物体上升的最大高度、子弹进入木块的深度等问题.所以在平时的学习中要多思考、多总结,这样才能使解题更加快捷高效!
(完)
猜你喜欢
——《势能》
文化纵横(2022年3期)2022-09-07
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2021年6期)2021-11-22
石油和化工设备(2020年12期)2021-01-09
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
看世界·学术上半月(2020年12期)2020-09-10
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20
电子制作(2019年11期)2019-07-04
中学生数理化·八年级物理人教版(2019年6期)2019-06-25