基于动态规划的城市客车挡位决策优化方法研究
2023-02-27 03:45章俊王洪亮王尔烈皮大伟王显会
农业装备与车辆工程 2023年2期
章俊,王洪亮,王尔烈,皮大伟,王显会
(210094 江苏省 南京市 南京理工大学 机械工程学院车辆工程系)
0 引言
传统自动变速器控制系统是根据驾驶员操作和车辆运行状态进行单一固定的挡位切换,不能根据实时的交通状况进行动态调整,大大增加了燃油消耗量[1-2]。
通过挡位决策优化以达到提高燃油经济性目标的本质是通过换挡决策来影响发动机工作点,进而降低燃油消耗[3]。国内外学者从这一角度出发,主要使用动态规划算法(Dynamic Programming,DP)、进化算法(Evolutionary Algorithms,EA)和混杂系统理论进行挡位决策优化。2002 年,Kolmanovsky 等[4]提出了一种基于随机动态规划的汽车动力总成系统最优运行策略求解方法,其目标是将燃料消耗和尾气排放降至最低;Kim[5]提出了基于DP 算法对电子节气门控制和动力传动系统进行优化,相比原有挡位决策具有更好的驾驶性和燃油经济性,并且比传统获取挡位切换MAP 更灵活简便。
与传统方法不同的是,最小化不是针对一个预定循环工况,而是在来自底层马尔可夫链驱动循环发生器的一类轨迹上的随机“平均”意义上执行的,该方法更适用于在线优化。刘畅[6]针对中国典型城市工况,以电动客车能量回收为目标设计了DP 算法,但是在算法设计过程中未作出相应约束和优化。
为了达到油耗或能耗最优,会导致频繁换挡、意外升挡等现象。基于EA 算法目前使用较多的是遗传算法(Genetic Algorithm,GA)。Saini 等[7]在传统GA 算法的基础上进行改进,采用了带精英策略的非支配排序,以单位距离能耗作为经济性目标函数、速度跟踪误差作为动力性目标函数,最终得到有良好综合性能的挡位决策MAP;高子茵等[8]采用0~30 km/h 的加速时间为优化目标的GA 算法进行换挡点优化,通过验证该算法能够有效提高动力性的同时能保证一定的燃油经济性。
混杂系统指的是系统内同时含有离散和联系状态,并且相互影响、相互作用,其本质是复杂非线性系统[9]。李升波[10]认为,有级式自动变速器挡位决策中含有离散型变量,且状态方程、性能指标具有强非线性。提出基于Legendre 伪谱拼接法求解换挡点的方法,并进行仿真,验证该方法对车辆节油的有效性;He 等[11]将车辆纵向动力学建模为混杂系统,提出了一种基于优化的挡位决策方法,并通过李雅普诺夫函数验证该系统的稳定性,制定了重型车辆的挡位决策MAP。
本文结合城市客车具有固定站点、固定线路的特点,以提高燃油经济性为目标,从不同交通状况对应不同换挡规律角度,解决传统城市客车挡位决策方法难以适应不同工况的问题。本文主要内容有:(1)采用主成分分析、聚类分析对该线路工况进行分类和构建;(2)采用含不同惩罚因子的动态规划算法,求解不同工况下的最优挡位决策序列,提取适应不同工况的换挡规律;(3)在综合线路工况下,与传统换挡规律进行仿真对比。
1 线路工况构建
常用的工况构建方法有行程分析法、V-A 矩阵分析法、定步长截取法和马尔科夫法[12]。本文采用行程分析法将城市客车两个怠速状态之间的车速区间划分成为运动学片段,分割产生了3 483 个运动学片段。
1.1 主成分分析
为了正确描述公交车运行工况,本文选择3 类使用频率较高、能够反映城市客车线路运行的特征参数:表征城市公交车速特点——平均速度、平均行驶速度、速度标准差以及最高车速;表征加、减速特点——最大加速度、平均加速度、最大减速度、平均减速度、加速度标准差;表征片段长度特点——加速时间比、减速时间比、怠速时间比、片段持续时间、巡航时间比以及行驶路程。在能够保证原始数据信息尽量完整的前提下,利用主成分分析方法,将初始的15 个特征参数通过线性组合得到少数相互独立的新变量。对该15 个特征参数按主成分分析,得到少数相互独立的新变量,分析步骤为:(1)各片段特征参数值进行标准化处理;(2)计算相关系数矩阵;(3)计算相关系数矩阵的特征值和特征向量;(4)计算累计贡献率。
通过对3 483 个片段的特征参数进行上述步骤的处理,得到15 个主成分。由图1 可见,前5 个主成分累计贡献率已经超过90%,可以代替原来的15个特征参数表征该线路上的大部分运行特征。
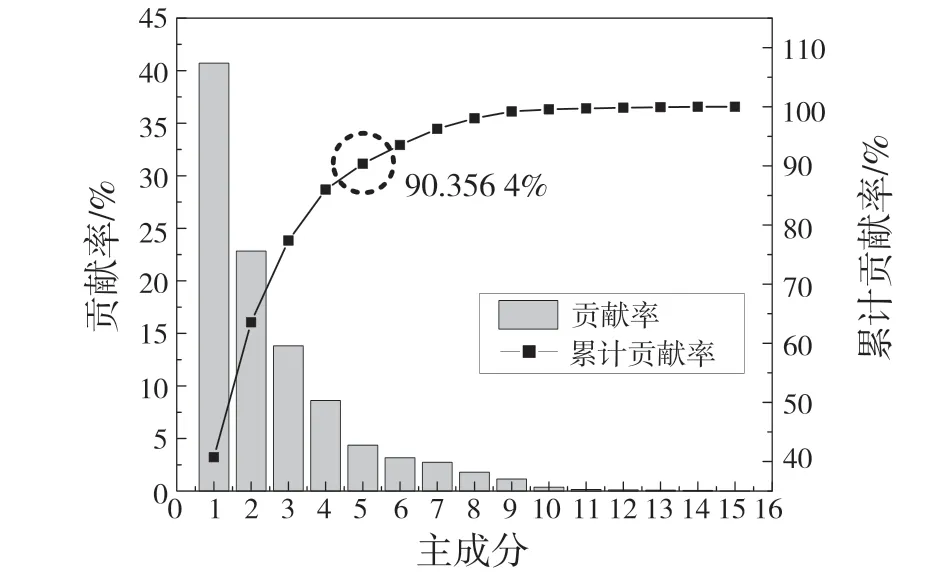
图1 累计贡献率Fig.1 Cumulative contribution rate
1.2 聚类分析
为了后续分析,需要相近特征的运行片段归为同一类,本文选择动态聚类中的K-means 聚类分析方法,分析步骤:(1)首先确定聚类因子和初始聚点。聚类因子选用前5 主成分,初始聚点以最大最小原则进行选取;(2)按照欧式距离定义两点之间距离,以每个运动片段距离初始聚点最近为原则进行初始分类;(3)再次计算聚类中心;(4)不断重复以上步骤,直至聚类中心不再发生变化。
根据步骤(1)~步骤(4),该线路上的工况分为3 类,将该3 类工况的加速时间比例、巡航时间比例和怠速时间比例绘制成三维点图,各个速度段的比例绘制成柱状图,如图2 所示。
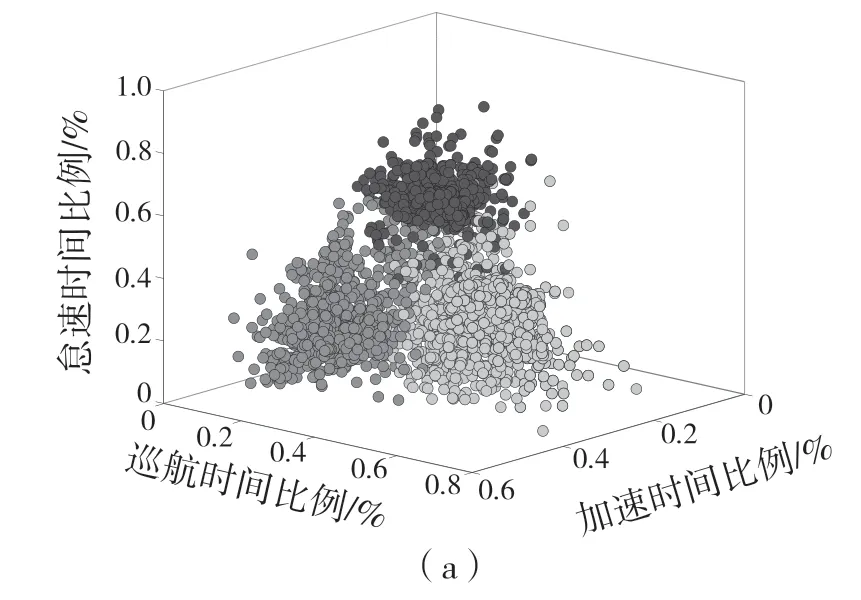
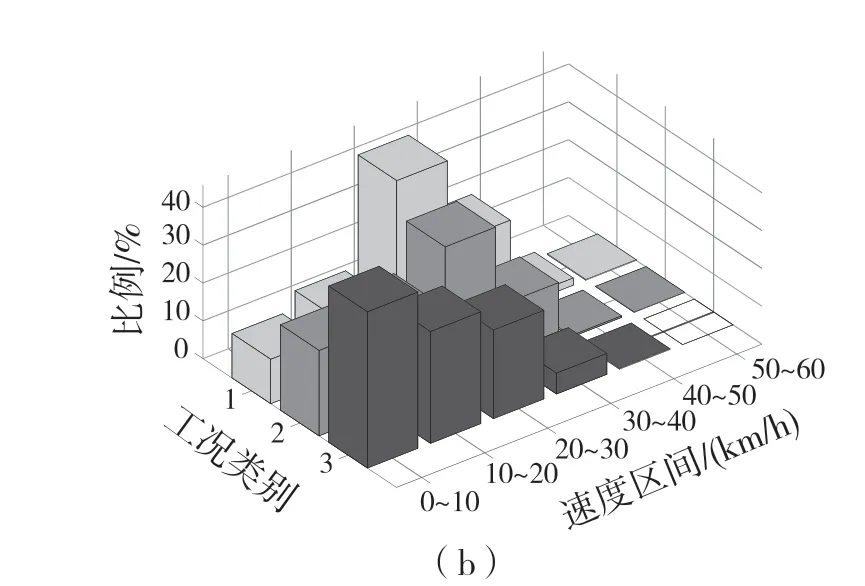
图2 聚类结果Fig.2 Clustering results
3 类工况分别占比43.58%、26.02%、30.40%。第1 类工况的工况怠速时间比例最低,巡航时间比例高且行驶速度主要分布在[30,50]速度区间内。
将第1 类工况表征该线路上的畅通工况;将第2 类工况表征一般畅通工况。第2 类工况的怠速时间比例中等,加速时间要多于第1 类工况,行驶速度主要在中速区间内;将第3 类工况表征拥堵工况。第3 类工况的怠速时间比例最高,且行驶速度主要分布在[0,30]速度区间内。
1.3 工况构建
本文定义偏差量bias 这一指标来选择合适的运动学片段进行工况构建。偏差量bias 可以反映各片段与其所属类整体类的契合程度,其值越靠小,说明两者之间越契合。偏差量bias 公式表示为:
式中:xi,j、xi,k,j——第i 类工况的第j 个整体平均特征参数值、第i 类工况中第k 个运动学片段的第j 个特征参数值,i=1,2,3,j=1,2,…,15。
将3 483 个运动学片段按照类别分成3 个数据样本,选取偏差量较小的每一类各10 个运动学片段进行工况构建,结果如图3 所示。
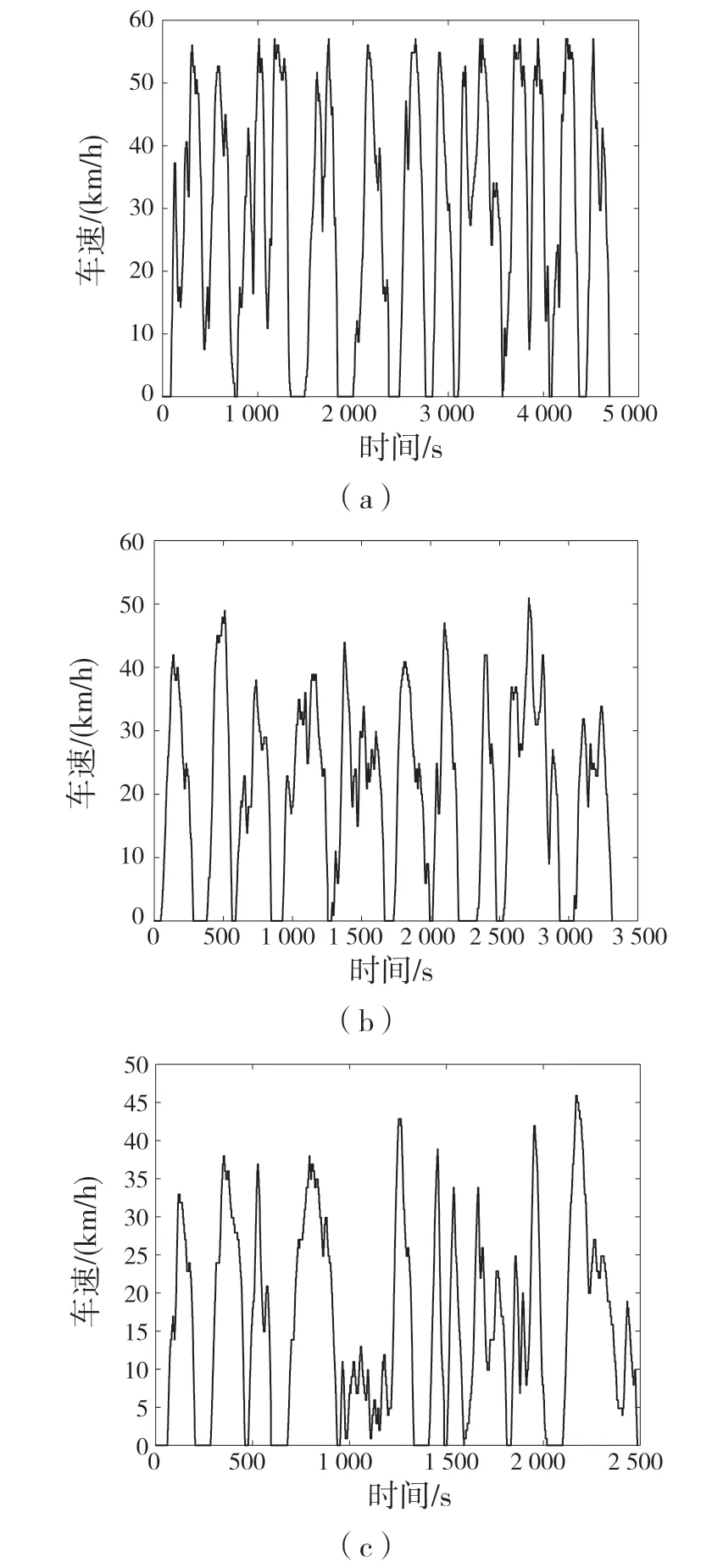
图3 各类工况构建Fig.3 Construction of different working conditions
2 不同工况下基于动态规划的换挡规律提取
2.1 挡位决策动态规划问题建立
每一时刻的换挡点对当前城市客车行驶状态以及燃油消耗量有着重要影响,可将城市客车运行中挡位决策优化问题分解为多阶段的最优求解[13]。本文采用动态规划进行挡位决策,求解步骤如下:
(1)阶段划分:对于时间长度为T 的某线路工况,将其分为N 个时间长度为Δt 的离散阶段。
(2)选择状态变量和决策变量:第k+1 级状态变量为发动机转速ne(k)、实时车速ua(k)和城市客车当前所处于的挡位状态ng(k),第k+1 级决策变量为换挡指令ug(k)和节气门开度α(k)。
在给定的线路工况中,各时刻的车速已知,根据当前时刻的城市客车参数即可求出以下参数:发动机转速、需求转矩。另外,由发动机外特性可知,由发动机转速和发动机转矩得到当前阶段的节气门开度。
因此,此时最优挡位问题中的唯一状态变量为挡位状态ng(k),唯一决策变量为换挡指令ng(k)。
(3)状态变量转移方程:本文研究的城市客车采用5 挡自动变速器,如果不考虑特殊情况(如跳挡),只允许相邻两挡之间进行升降挡的情况下,则状态变量的转移方程为:
(4)确定动态规划优化指标函数
每个阶段的发动机燃油消耗量为:
式中Qt(k)与发动机转速ne(k)和节气门开度α(k)有关。
在确定某一循环线路离散阶段数为N 的情况下,通过选取不同阶段换挡序列,使得城市客车在该循环中所消耗的燃油量Jfuel取得最小值:
进一步地,有级自动变速器动态规划挡位决策递推方程为:
(5)设置约束条件
对发动机而言,在动态优化过程中,发动机输出转矩在有效转矩范围内,发动机转速需要保证在最小稳定转速到最大安全转速范围内。该城市客车采用5 挡自动变速箱,则挡位状态ng(k)约束为:
对决策变量ng(k)而言,其约束为:
2.2 挡位决策动态规划问题改进
考虑换挡间隔,采用计数器来设置两次挡位切换的间隔,在仿真中步长为0.2 s,设置如下约束:
另外,本论文增加离合器摩擦损失作为惩罚因子,因此就需要考虑换挡过程中的滑摩功[14],其计算公式为:
式中:W——滑摩功,J;Tc(t)——离合器主、从动盘之间的摩擦力矩,N·m;Δωc——离合器主、从动盘之间的角速度差,rad/s;t1-t0——滑摩时间,s。
因此优化指标函数在增加惩罚因子之后可改写为
式中:Ef——柴油热值,J/g,一般取46 040 J/g;β——权重系数,针对不同类型线路循环选取不同的值。当β=0 时,经济性最佳;当β=1 时,动力性最佳。
2.3 挡位决策动态规划问题求解
在畅通工况中,城市客车的运行道路情况较好,巡航时间比例也比较高,在该类工况下应更强调经济性,对于性能的需求较小,取β=0.2;在拥堵工况中,城市客车行驶环境复杂,频繁启停,在考虑经济性优化目标的同时又需要强调一定的城市客车机动性,因此取β=0.8;对于一般畅通工况,选取中间值β=0.5。以车速为横坐标、节气门开度为纵坐标,将不同工况下的最优的升档切换工作点绘制在同一坐标图上,结果如图4 所示。
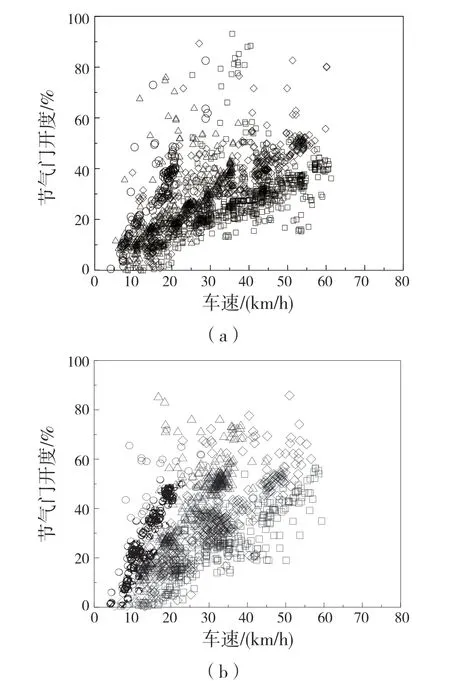

图4 不同工况下升挡点分布Fig.4 Distribution of upshift points under different working conditions
2.4 不同工况下换挡规律提取
对前文动态规划得到的线路换挡序列采用聚类分析,提取出不同工况下的升挡线。由图4 中升挡点可以发现,缺少了在节气门开度较大时(大部分>60%)的升挡线部分。节气门开度大即代表加速踏板开度大,有较强的加速或超车等意图,而本论文中各换挡点是根据动态规划以节油为目标进行优化得到,因此对于大油门部分的升挡线采用对原有趋势进行延伸。另外,对于降挡线的选取,采用等延迟型策略,延迟间隔为-3 km/h。所得到的基于动态规划的静态最优换挡规律如图5 所示。
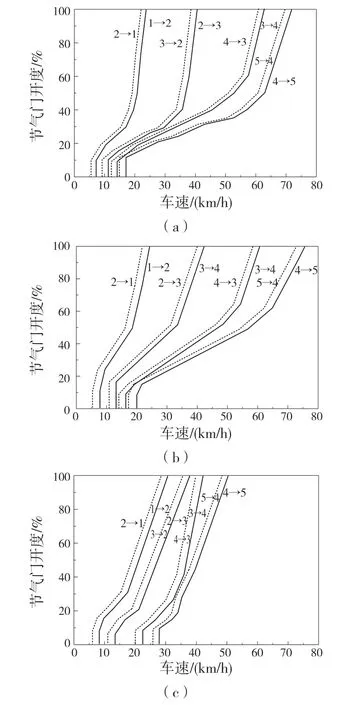
图5 换挡规律提取Fig.5 Extraction of optimal shift schedules
3 仿真验证
挡位决策整体模型包括驾驶员模块、发动机模块、液力变矩器模块、变速器模块、挡位决策模块、整车模块,因此只有该仿真模型具有较强的车速跟随可靠性才能较真实反映城市客车线路运行状态。验证结果如图6 所示。
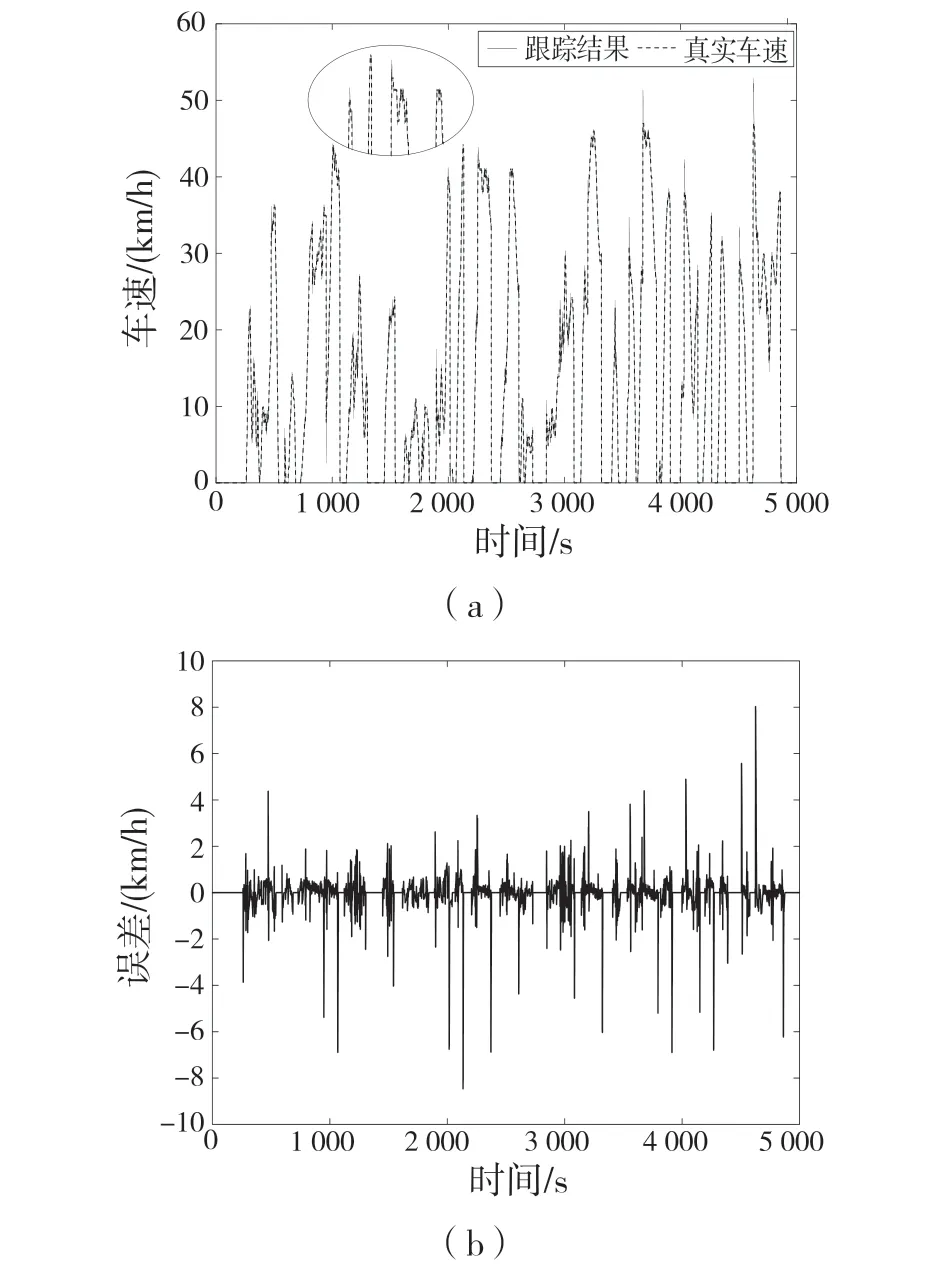
图6 车速跟随验证Fig.6 Speed following verification
可以看出,除个别尖点处外,其他时刻误差在仿真车速能基本上可以跟随目标车速,所搭建的模型能有效反应城市客车的状态。
为了更真实地反映线路情况,将所构建的畅通工况、一般畅通工况和拥挤工况按照各自占比选择不同比例长度,组成综合线路工况。3 类工况分别占比为43.58%、26.02%和30.40%,因此根据实际线路运行时间约为1 h,构建3 600 s 左右长度的综合工况进行所提出的挡位决策优化方法的验证。组合成的综合工况如图7 所示。
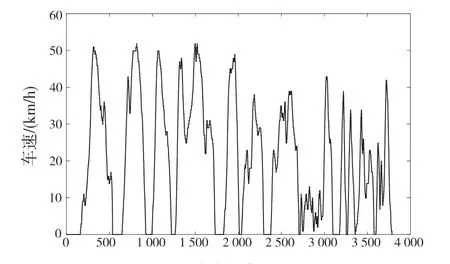
图7 线路综合工况Fig.7 Integrated line condition
选择线路累计燃油消耗量、高挡位利用率和累计换挡次数这3 个指标,将采取原换挡规律和基于动态规划提取出的换挡规律进行对比,结果如表2 所示。
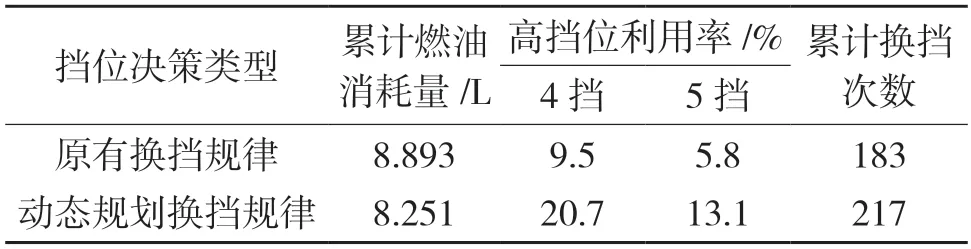
表2 2 类挡位决策方法结果对比Tab.2 Comparison of results of two kinds of gearshift decision methods
以传统原换挡规律的燃油油耗量为基准,基于动态规划提取出的换挡规律比之降低了7.22%,高挡位利用率提高了18.5%,累计换挡次数稍微高于传统换挡规律。基于动态规划提取出的换挡规律是以燃油消耗量最少为优化目标,在3 种类型工况优化中采取了不同的β值,通过升挡切换让发动机尽可能工作在高效区。因此,采用基于动态规划的挡位决策方法能够有效提高燃油经济性。
4 结束语
本文以配备5 挡自动变速器的某路城市客车为研究对象,为提高燃油经济性以及解决城市客车传统换挡规律对于不同工况适应度较差的问题,在分析国内外挡位决策优化方法的基础上,考虑到城市客车具有固定线路、固定站点的特点,应用主成分分析、K-means 聚类分析、动态规划算法进行适应不同工况的最优换挡规律提取,提出了不同交通环境下的挡位决策优化方法。仿真结果表明,所提出的挡位决策优化方法提高了高挡位利用率、降低了燃油消耗量,有效做到动力性和燃油经济性的平衡。
猜你喜欢
小哥白尼(野生动物)(2021年3期)2021-07-21
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
汽车维修技师(2017年6期)2017-11-18
北京汽车(2017年3期)2017-10-14
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28