
智能网联重卡的前向碰撞预警方案设计
2023-02-27 10:35张倩倩郭志培
智能计算机与应用 2023年2期
张倩倩, 郭志培
(1 山西工程职业学院 计算机工程系, 太原 030009; 2 江铃重型汽车有限公司 技术中心, 太原 030032)
0 引 言
随着经济的不断发展,道路上的车辆越来越多,车辆发生事故的概率也不断增加,人们对汽车的安全也越来越重视。汽车安全技术已经被整车厂和零部件供应商广泛地应用。汽车安全技术分为主动安全技术和被动安全技术[1]。汽车被动安全主要是指交通事故发生后,能最大限度减少驾乘人员伤害的安全装配,主要包括安全带、安全气囊等。主动安全是尽量自如的操纵控制汽车的安全系统措施,比如前碰撞预警功能(Forward Collision Warning,简称FCW)和自动紧急制动功能(Automatic emergency braking function,简称AEB)等。
前向碰撞预警系统是通过摄像头、雷达等传感器实时感知车辆前方的物体,检测车辆与目标之间的距离并警示驾驶员的一种系统[2]。前向碰撞预警系统可以分为两种,一种基于毫米波雷达、激光雷达、摄像头等传统传感器,感知并获取前方车辆信息;另一种通过车车(Vehicle-to-Vehicle, V2V)通信实现车辆间运动、轨迹信息交互[3]。基于目前的基础设施建设程度以及通信协议的差异,实现FCW的功能一般是采用传感器感知获取前方车辆信息并预警的方案。汽车前向碰撞预警系统由环境感知传感器、决策控制器和执行器3部分组成[4]。
作为物流运输的中坚力量,重卡大部分时间行驶在高速公路和国道省道上,相对城市内部道路场景而言,其交通场景比较简单。面对物流运输时效性的要求,司机在行驶过程中容易出现疲劳驾驶的现象。在车辆即将发生碰撞时,FCW通过声音、视觉或者触觉有效地提醒驾驶员,及时地采取制动等有效措施,避免或者降低车辆碰撞带来的损害。
1 前向碰撞预警系统功能简介
前向碰撞报警FCW 的功能是当检测并判断到车辆与前方同向行驶车辆存在碰撞可能性时,给驾驶员提供警告。前方同向行驶的车辆包含3种情况:前方车辆静止,前方车辆以低于本车的速度行驶或者车辆正在制动。FCW可以降低追尾碰撞的发生率,并在追尾碰撞发生之前提醒驾驶员做出反应,减轻事故严重程度。
FCW功能是通过传感器的感知和控制器的决策来实现的。常见的传感器有激光雷达、摄像头、毫米波雷达、超声波雷达等,这4种传感器对比见表1。

表1 各种传感器的性能对比
不同传感器获得的数据可以相互融合,增加或增强现有的系统功能。基于多传感器信息融合的防碰撞预警系统根据多传感器接收到的车辆前方目标信息和本车的状态信息,利用多源信息融合技术,识别出本车前方车辆的距离和速度等状态信息,进行碰撞危险估计。从反应时间、距离、速度3个角度优化控制,可减少驾驶员的负担和错误判断,对于提高交通安全性起到了至关重要的作用,是实现汽车自动驾驶的基础。
FCW系统对道路没有特殊要求,在高速路、城市、国道、隧道、匝道、桥梁道路的直路和弯道上均可以工作,可以识别所有取得牌照、合法上路行驶的车辆和身高在0.8 m以上的行人。
2 重卡FCW系统方案
基于各种传感器的特性,同时兼顾整车的成本控制,目前智能网联商用车采用的是前视摄像头和77 G毫米波雷达结合,实现FCW的功能。智能网联商用车驾驶室位置比较高,摄像头布置在前挡风玻璃中间,距离地面的高度2 m以上,摄像头的盲区较大,因此需要在车辆下方同时布置毫米波雷达。摄像头(camera)+ 毫米波雷达(redar)的实车布置方案如图1所示。

图1 摄像头和雷达实车布置
将摄像头和雷达两种传感器采集到的两种不同数据进行融合,能够有效地改善车辆的性能。雷达将识别到的目标信息通过控制器局域网(Controller Area Network,CAN)总线发送给摄像头,摄像头完成数据的融合处理后,再通过 CAN 总线将相关的信息传输给仪表,最后通过仪表的显示,提醒驾驶员。
FCW功能实现的前提是车辆需要具备一定的车速条件,当车辆偏离起效车速的范围,该功能停止工作,FCW系统的工作条件见表2。

表2 FCW系统的工作条件
FCW系统的主要功能是在本车与行驶路径上最近前车存在潜在碰撞危险的情况下向驾驶员发出报警。该功能主要是依据本车到前方车辆的距离、前方车辆相对于本车的相对速度、前方车辆是否在本车行驶路径上三方面的信息实现的。
FCW系统的功能通过相关的检测和输入信号共同实现的,摄像头和雷达检测出前方运动的车辆,由摄像头完成最终的检测信号融合和相关逻辑的判断,将相关的报警信息输出。FCW系统的功能实现示意图如图2所示。
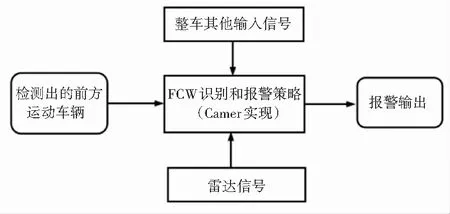
图2 FCW功能实现示意图
FCW开关和灵敏度选择开关均采用触屏按键的软开关,触屏按键配置于整车车机系统显示屏上,且默认为开启状态。整车系统接收信号并将此信号发送到CAN总线,摄像头从CAN 总线接收FCW开关信号和灵敏度信号。FCW系统原理框图如图3所示,摄像头接收和发送的信号为部分信号。

图3 FCW系统原理框图
FCW系统采用两级报警策略,对应的碰撞时间标定参数(Time To Collision,TTC)不同。第1级报警采用黄色指示灯,5 Hz的闪烁频率,第1级报警时间内驾驶员没有采取制动等动作会触发第2级报警;第2级报警采用红色的指示灯,频率更高,再次提醒驾驶员。
3 FCW功能测试
据统计,典型驾驶员感知-反应时间范围为0.9~2.1 s,95%的驾驶员感知反应时间为1.6 s[5-6]。测试包括静态测试、场地测试和道路测试。其中静态测试是对FCW系统相关的外观、信号、状态的检查,本文只详述场地测试和道路测试。
3.1 FCW功能的场地测试
FCW功能的场地测试要求在封闭区域内进行,且该封闭区域内有测试标准中要求的车道线。场地测试按照JT/T 883 营运车辆行驶危险预警系统技术要求和试验方法进行。测试中使用VN1630设备监控被测车辆的CAN总线,使用软件中的窗口进行动态监控。车速93 km/h,触发FCW 一级报警的动态监控图如图4所示。

图4 FCW 一级报警的动态监控图
FCW功能的场地测试TTC统计如图5所示,FCWA_TTCSet为EQ设定的A级报警碰撞时间,FCWB_TTCSet为EQ设定的B级报警碰撞时间,FCWTTCA_EQ表示A级报警时EQ计算的碰撞时间,FCWTTCB_EQ表示B级报警时EQ计算的碰撞时间,FCWTTCA_GT表示A级报警时地面实况计算的碰撞时间,FCWTTCB_GT表示B级报警时地面实况计算的碰撞时间。
由图5报警TTC分布可知,FCW报警发出时TTC多数分布在阈值±12%范围内;试验中未出现漏报警、误报警情况,FCW系统报警情况总体符合预期设计。

图5 场地测试TTC统计
3.2 FCW功能的道路测试
FCW功能的道路测试的TTC统计图如图6所示,路试里程3 010 km,持续时间55.26 h。
图6中FCWTTCA_EQ、FCWTTCB_EQ分别为A、B级报警时刻EQ计算的TTC值;FCWTTCA_GT、FCWTTCB_GT分别为报警时刻由雷达测量数据计算的真实TTC值;红、蓝色实线分别为FCW各级报警的TTCSet,实线上下的两条虚线为允许的报警TTC范围(±12%),即报警时TTC位于对应的TTCSet±12%的范围内可认为正常报警。由图6可见,本次路试共触发4次报警,均为1级报警,4次FCW报警事件的报警时机TTC均分布于允许的报警范围内。没有发生漏报警、误报警等严重影响系统性能的异常报警,异常报警频度满足产品设计要求(≤1次/300 km)。

图6 道路测试TTC统计
4 结束语
从FCW系统的方案和测试结果来看,FCW功能在智能网联重卡上有良好的表现。随着法规的强制要求,FCW功能已成为牵引车和车速大于90 km/h、载重大于18吨的载货车的标准配置,能够有效地降低事故发生的概率。FCW是智能驾驶辅助系统中一项重要技术,随着智能驾驶辅助技术的不断发展,重卡的自动驾驶等级会越来越高并最终发展为无人驾驶卡车。不仅可以让驾驶员体验到智能卡车的安全性、舒适性和便利性,而且可以降低或避免交通事故的发生,节约油耗进而降低物流运输的成本。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年12期)2022-01-18
民用飞机设计与研究(2020年4期)2021-01-21
河南科学(2020年3期)2020-06-02
电子制作(2019年11期)2019-07-04
电子测试(2018年13期)2018-09-26
中国交通信息化(2017年12期)2017-06-06
公民与法治(2016年4期)2016-05-17
