可用于大型室内消杀任务的空地异构机器人系统研究
2023-03-01 08:04余秋月罗佳维邓长鑫邓豪东项燊鹏叶方达陈媛
电子制作 2023年2期
余秋月,罗佳维,邓长鑫,邓豪东,项燊鹏,叶方达,陈媛
(武汉城市学院,湖北武汉, 430083)
目前,消杀工作主要分为人工喷洒消杀、自动移动小车消杀,以及室外的无人机消杀。人工消杀工作效率低,且对消杀人员的身体有一定的损伤。而自动移动小车的消杀在室内行走受限,导致无法实现全覆盖消杀。无人机的消杀工作主要用于室外,采用的是大型无人机,不适合室内,若采用微型无人机则存在载荷问题,不能承载过多消杀液。针对以上问题,文章将微型无人机与地面移动小车结合构成空地异构机器人系统,用于对大型室内空间的消杀工作,该消杀机器人系统可大大提高消杀效率和覆盖率,对公共卫生服务业、医疗业的未来发展有着重要的意义。
1 消杀机器人系统介绍
消杀机器人系统主要是用于大型室内空间(特指环境相对简单的图书馆、实验室、机场、商场等)的消杀工作的机械。该系统是由空中微型消杀无人机平台,地面移动熏蒸及补液平台以及消杀监控平台构成,如图1所示。
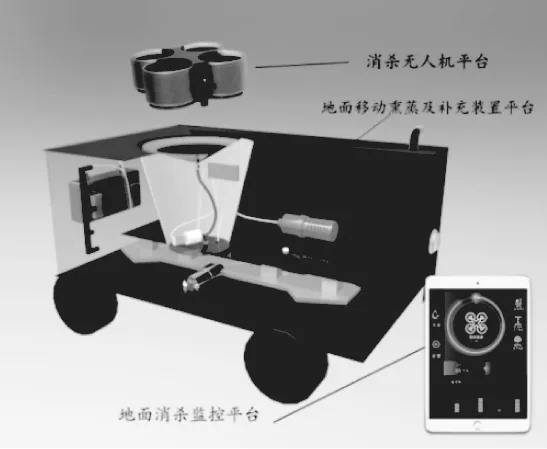
图1 空地异构消杀机器人
2 消杀机器人机械结构设计
■2.1 空中微型消杀无人机机械结构设计
空中消杀无人机是基于四旋翼涵道无人机,采用超声波消毒振荡雾化的方法进行室内苍术消毒液熏蒸消毒。相较于传统四旋翼无人机而言,四旋翼涵道无人机在室内空间飞行具有更加的优势,传统的四旋翼涵道无人机的旋翼容易损坏并且容易伤害到人,而四旋翼涵道无人机则有涵道,可以对旋翼起一定的保护作用,并防止高速的旋翼伤害到人,为室内消杀工作的安全性提供了充分的保障。
在常见的四旋翼涵道机器人的基础上,将四旋翼涵道进行改造为药箱,能够储存一定量的苍术药液,能够在需要时进行超声波振荡喷洒。并采用三叶浆与涵道配合的设计,使得装置具有更小的噪音、更足的动力、更大的升力。机身采用PP材料,PP材料具有密度低、强度大、力学性能优良、化学稳定性好的特点。以上设计,能够使消杀无人机平台在进行消杀工作时给人提供一个相对安静、安全的环境。
■2.2 地面移动熏蒸及补液小车机械结构设计
地面移动熏蒸及补液小车的驱动部分由四个定向轮构成.输入信号通过L298N调节电机的正反转,以此实现机器人在地面移动的前进、后退、左转、右转和停止运动。与足步式移动结构相比,轮式移动结构设计简单且移动速度较快。而在轮式结构中,与两轮、三轮结构相比,四轮差速驱动结构更加稳定,并可实现原地转向。
地面移动熏蒸及补液小车的熏蒸消杀模块内有蓄电池、恒温加热器等器件,恒温加热器对装置内苍术消毒液进行加热熏蒸,按照一定的路线移动,实现室内地面的消杀工作。同时,配合消杀无人机空中超声波雾化消杀,完成大型空间的双重消杀工作。
母对接模块采用倒锥形凹槽结构,如图2所示,它与消杀无人机上的子锥对接模块构成锥-锥对接机构,该结构可大大提高空地对接的容差率。当消杀无人机药箱内药液不足时,通过WiFi协同通信,无人机将通过该机构实现两平台的快速对接。
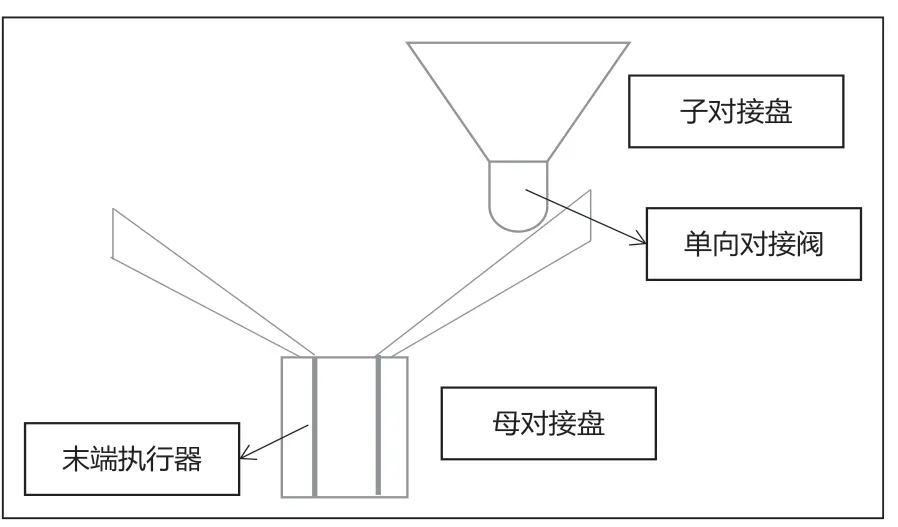
图2 母子对接模块
3 消杀机器人控制结构设计
消杀机器人控制结构分为两大部分:空中微型消杀无人机部分和地面熏蒸及补液小车部分。
■3.1 空中微型消杀无人机部分
该部分主要分为6模块:(1)主控器Atmega2560属于8位AVR微控制器,其工作频率为16MHz,存储可达64K字节的SRAM;(2)航姿参考系统(ARHS)主要由MPU6050(内部集成了一个三轴陀螺仪与一个三轴加速度计)、三轴磁强计HMC5883L、气压计MS5611组成,主要功能是为主控器提供机器人在空中飞行时的航姿参考信息;(3)运动执行终端为旋翼无刷电机;(4)避障模块为激光传感器;(5)消杀补液模块为摄像头、液位检测传感器和超声波振荡器;(6)无线通讯模块。如图3无人机总体控制结构图所示。
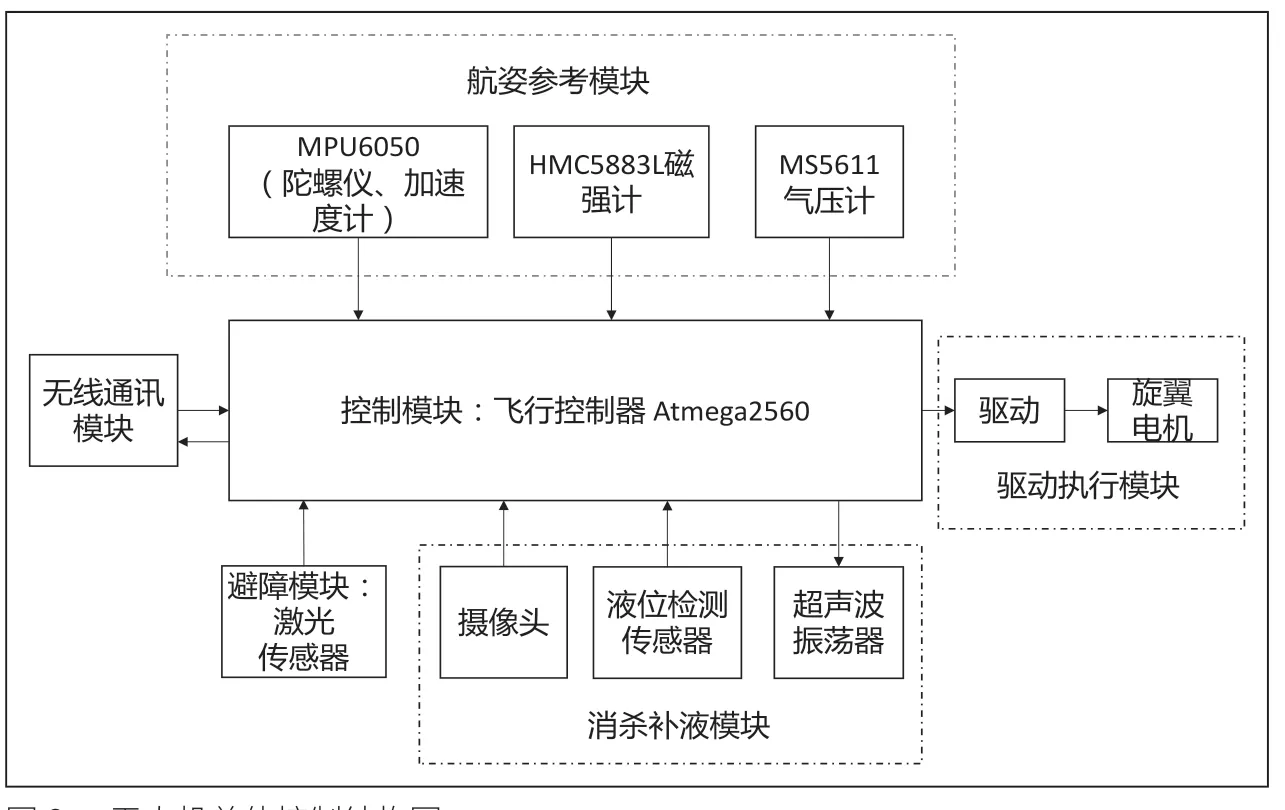
图3 无人机总体控制结构图
3.1.1 无人机飞行控制
四旋翼涵道无人机的飞行控制与传统的无人机飞行方法一致,也是通过姿态角计算,以及双闭环PID控制,对无人机的电机转速进行控制,使机桨产生不同升力,从而实现无人机的飞行动作。
式(1)为解算出的当前姿态角,其中ϕ为航向角(Yaw),θ为俯仰角(Pitch),γ为横滚角(Roll)。q˙=q0+q1i+q2j+q3k为四元素的一般表示法。如图4为无人机的双闭环PID姿态控制器原理图,控制器输入为期望姿态角(遥控器输入或预期计算所得),输出为四个电机的目标转速,从而实现无人机前进、后退、左移、右移、悬停、偏航动作。图5为无人机驱动控制原理图。
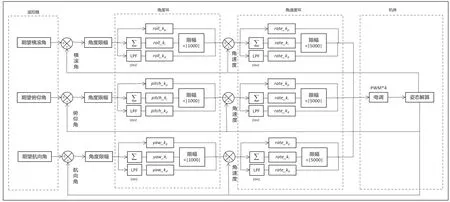
图4 无人机的双闭环PID姿态控制器原理图
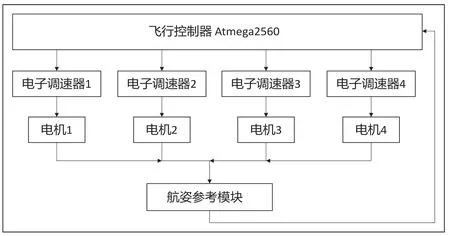
图5 无人机驱动控制原理图
3.1.2 自动避障系统
无人机配有自动避障系统,自动避障系统是由激光传感器与飞行控制系统组成,激光传感器可检测到一定范围内的障碍物,当避障系统检测到无人机与障碍物的距离接近设定的阈值时,飞行控制器将通过循迹算法对旋翼电机旋转速度进行调节,从而实现无人机的自动避障。自动避障模块控制原理图如图6所示。
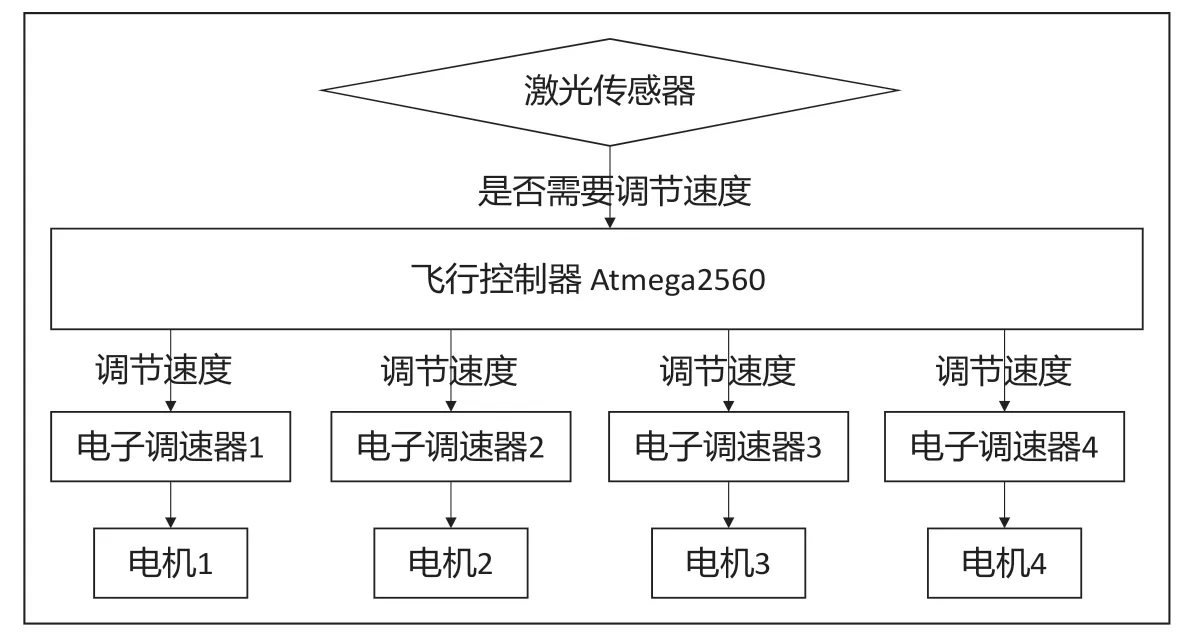
图6 自动避障模块控制原理图
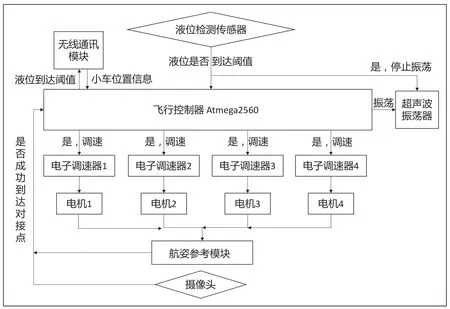
图7 消杀补液模块控制原理图
3.1.3 消杀补液模块
消杀补液模块包括药液低位监控、药液振荡雾化、无线通讯等。当液位检测传感器检测到液位到达所设定的液位阈值后,无线通信模块将把这一信息发送给地面小车,并等待接收小车位置坐标。与此同时,超声波振荡器将停止工作。当无人机接收到小车位置信息后,无人机将在飞控控制下朝小车方向飞去,靠近小车后,无人机通过视觉辅助找到母对接盘,并降落至此,完成平稳对接。
■3.2 地面熏蒸及补液小车部分
地面熏蒸及补液小车包含:(1)主控器STM32F103,它属于32位ARM微控制器,是由意法半导体公司(ST)出品,其内核是Cortex-M3,最高工作频率为72MHz,最大存储可达64K字节的SRAM;(2)位姿参考模块,该部分主要由MPU6050(内部集成了一个三轴陀螺仪与一个三轴加速度计)、三轴磁强计HMC5883L组成,主要功能是为主控器提供小车移动时的位姿参考信息;(3)运动执行终端为小车轮子电机;(4)熏蒸补液模块,该部分由液位检测模块(对药液地位进行检测,不足发出警报)、恒温加热器(对药液加热熏蒸)、末端执行器(与无人机药箱紧密对接)以及液压泵(补液)。
3.2.1 地面驱动控制设计
小车驱动系统采用的是四个独立电机驱动定向轮驱动,控制板上的输入信号通过L298n来调节电机的正转、反转以及变速,以此实现机器人在地面移动的前进、后退、左转、右转和停止动作.当无线通信模块接收到无人机上药液液位到达设定阈值后,主控板将控制小车停止移动,原地待命,直到无人机补液完成,小车将恢复正常轨迹运行。
3.2.2 熏蒸及补液控制设计
熏蒸及补液模块包含熏蒸和补液两个方面,熏蒸是在系统开始工作以后就一直通过恒温加热器进行。而补液是当无人机上的子对接盘与小车上的母对接盘对接成功以后,控制器控制末端执行器旋转,使无人机对接口与小车补液接口紧密对接,然后液压泵工作,完成对无人机药箱的补给。最后末端执行器松开无人机,无人机回到补液前路径继续执行消杀任务。
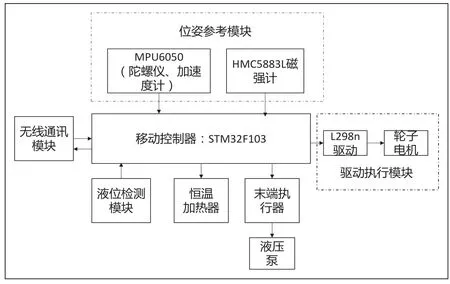
图8 地面熏蒸及补液小车总控制原理图
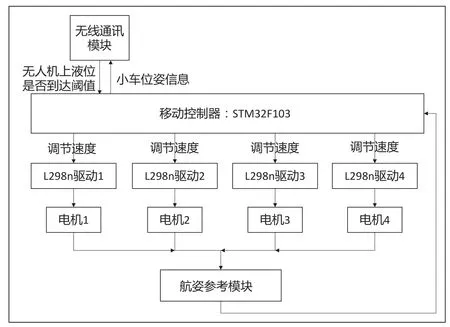
图9 地面驱动控制原理图
4 消杀试验
消杀无人机根据大型室内空间设定的已有路径进行循环消杀;与此同时,地面移动熏蒸及补给平台按照给定点及给定时间进行定点移动,并在给定地点处熏蒸消杀。当消杀无人机内苍术消毒液低于液位线时,地面移动熏蒸及补给平台将通过通信模块获取该信息,消杀无人机与地面移动平台将同时运动到指定位置进行对接并完成自动补给。补给结束后,消杀无人机与地面移动平台将回到消毒液补给信息获取前的位置,并继续完成消杀工作。在无人机与地面熏蒸补给平台工作过程中,可实时利用消杀监控平台进行消杀工作的监测。
无人机与移动小车的对接过程如图11所示。无人机捕捉到移动小车上的母对接盘上的标志后,在惯性导航与视觉的融合作用下,慢慢靠近母对接盘。
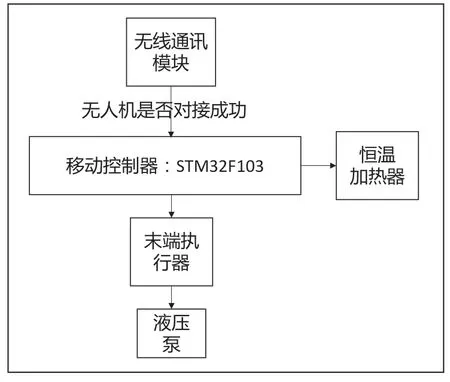
图10 熏蒸及补液控制原理图
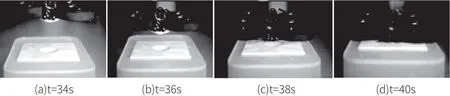
图11 无人机与地面小车的对接过程
5 总结
文章详细介绍了空地异构消杀机器人系统的设计方案,并着重对机器人系统的对接结构和对接控制进行设计,最后通过无人机与地面小车的对接实验来说明该设计是具有一定的可行性。该系统结合微型无人机与移动小车消杀的优点,可以对大型室内环境进行消杀作业,大大提高了室内消杀的安全性和工作效率。
猜你喜欢
医学理论与实践(2022年15期)2022-08-11
现代职业安全(2022年4期)2022-06-10
科教新报(2021年34期)2021-09-30
环球时报(2021-04-22)2021-04-22
无人机(2020年2期)2020-07-20
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
大众健康(2019年4期)2019-04-24
家庭科学·新健康(2018年3期)2018-03-22