
基于曲线拟合与数据相似度的自动对焦算法
2023-03-01 05:25陈仕旗李明臻苏建功
南方农机 2023年6期
陈仕旗 ,李明臻 ,苏建功
(长安大学工程机械学院,陕西 西安 710064)
0 引言
随着光学仪器的迅速发展,自动对焦技术显得越来越重要,该技术被广泛用于工业相机、显微镜、农用机械导航等各行各业中[1-3]。依据能否知晓镜头绝对位置,自动对焦系统可分为闭环控制自动对焦系统与开环控制自动对焦系统。
与闭环控制自动对焦系统相比,开环控制自动对焦系统无法准确获取镜头绝对位置,对焦精度较低,算法更加复杂,但开环控制自动对焦系统结构简单,成本低,应用范围更广,更适合农用机械。许多学者针对开环控制自动对焦系统进行了深入的研究,在不同程度上提高了对焦的速度与精度。Zhang等[4]提出了一种结合全局搜索与爬山法的自动对焦算法,该算法先使用大步长全局搜索算法寻找最佳对焦位置所在区域,再使用小步长爬山算法在区域内寻找最优对焦位置,可有效提高对焦精度。杨鹏博等[5]提出了一种变步长爬山法的自动对焦算法,通过实时改变爬山法步长,有效提高了对焦的精度与速度。然而这些方法需来回调节镜头完成对焦,加大了迟滞误差的影响。
为解决这一问题,本文提出一种基于曲线拟合与数据相似度的自动对焦算法。该算法将曲线拟合与数据相似度算法相结合,通过曲线拟合寻找理想对焦位置作为数据相似度算法基准点,再通过相似度算法,确定最佳对焦位置。曲线拟合算法可有效降低局部噪声对寻找基准点的影响,数据相似度算法可有效降低迟滞误差和局部噪声对对焦结果的影响。
1 对焦搜索算法
1.1 曲线拟合算法
曲线拟合算法在自动对焦中有着广泛应用[6-7],通过曲线拟合可准确找到聚焦测度(Focus on the measure, FM)曲线峰值位置,但该方法无法解决迟滞误差问题。本文采用该方法求解数据相似度算法所需基准点。一般情况下,FM曲线符合高斯函数[8],其函数形式如下所示:
将FM曲线中的数据点通过广义逆法进行求解,得到a、b、c的值,确定拟合曲线表达式,求解极值点,利用该方法可有效降低噪声对寻找FM曲线极值点的影响。
1.2 数据相似度算法
利用数据相似度算法可有效解决迟滞误差问题。首先,数据相似度算法需确定一个基准点,该点为拟合曲线极值点之后的一个点r;随后,选取拟合曲线中基准点之后的N1个点作为基准曲线;最后,选择基准曲线最后一个点之后的第N2个点为相似度计算起始采样位置,不断减小镜头相对位置,重新计算对应位置FM值。当返回曲线的点个数达到N1,得到待测曲线,随后计算与基准曲线的相似度。继续减小镜头相对位置,获得新的待测曲线并重新计算相似度,不断迭代,直到相似度第一次下降,此时的镜头相对位置就是相机的最佳对焦位置。其中,N1由后续实验获取,N2=30为观察回程误差所得。
本文通过余弦相似度法计算数据相似度,余弦相似度法是用向量空间中两个向量夹角的余弦值来衡量两个个体差异的大小[9]。
1.3 曲线拟合与数据相似度相结合
综上,当曲线拟合方法用于对焦时,虽然可有效降低图像噪声对对焦结果的影响,却不能解决迟滞误差问题;采用数据相似度算法能够有效解决噪声与迟滞误差问题,但是需先确定一个基准点与一个基准曲线。因此,本文提出一种基于曲线拟合与数据相似度的自动对焦算法,该算法将曲线拟合与数据相似度算法相结合,通过曲线拟合得到数据相似度算法所需要的基准点与基准曲线,随后采用数据相似度算法,寻找最佳对焦位置,有效降低了图像噪声影响,并解决了迟滞误差问题。
2 参数确定与实验
2.1 数据基础
本文在不同的光照与拍摄距离条件下,拍摄了10组不同图片。每组图片中,镜头相对位置从0调整至U,再从U调整至0,其中U为相机镜头相对位置变化上限。每个镜头相对位置处均连拍10张图片,计算每一张图片的FM值,用于获取每个相对位置对应的平均清晰度,从而降低噪声影响,精准找到实际的最佳对焦位置,与对焦搜索算法所得到的最佳对焦位置进行对比。
2.2 参数选择
参数选择主要涉及两个方面:一是参与曲线拟合的点的采样步长B,二是基准曲线的点的个数N1。
采样步长大小与曲线拟合效果密切相关。若B过小,采样点数较多,拟合效率降低;若B过大,采样点数较少,拟合精度降低。N1的大小也会对对焦结果产生极大的影响,N1过大或过小都可能导致计算结果不准确。
N1的选择范围为0~F,F的值为U-r-N2。本实验从0.05F开始,每次增加0.05F直至0.95F。通过计算不同B与N1所得最佳对焦位置与实际最佳对焦位置之间的误差,选取最合适的方案。图1展示了在不同的B与N1的情况下的对焦精度。从图中可以看出,当B≤10,N1=0.2F时,误差较小,精度较高。本文选择B=10,N1=0.2F作为自动对焦算法的参数。
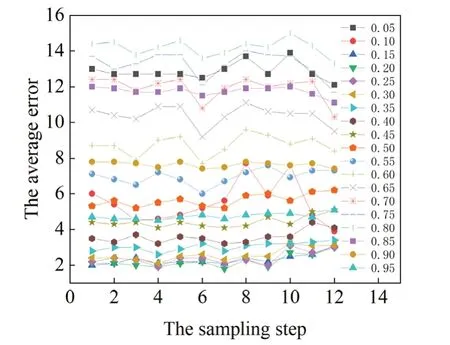
图1 不同采样步长与基准曲线数据点个数下的误差
2.3 对比实验
图2展示了在上述所选参数条件下,代码所得对焦结果与实际最佳对焦位置的差值以及采用传统爬山法时所得对焦结果与实际对焦位置之间的差值[10]。从图中可以看出,经过多次对焦,相比于传统的爬山算法,本文算法所得的对焦结果与爬山算法对焦成功时均有较高的精度,但本文算法抗噪能力更强,不容易出现对焦失败的情况。
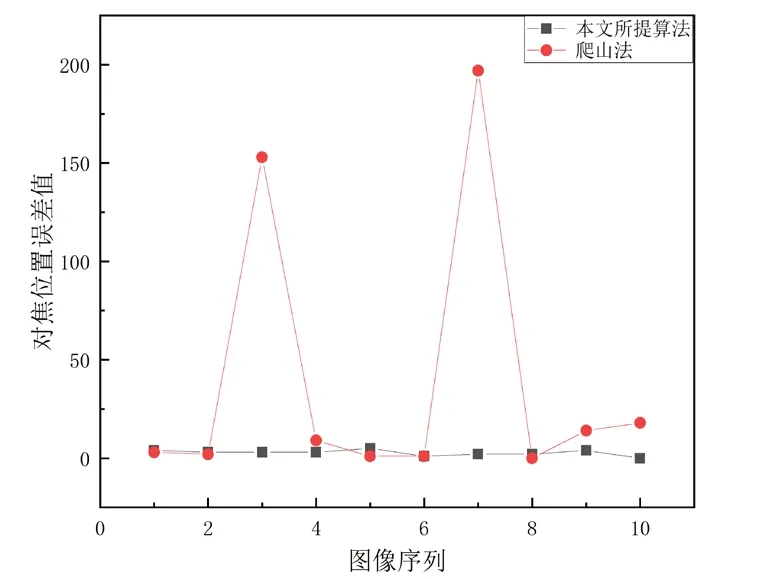
图2 两种方法误差对比
3 结论
本文提出一种基于曲线拟合与数据相似度的自动聚焦算法,该算法由曲线拟合与数据相似度两部分组成,曲线拟合部分用于确定数据相似度算法所需要的基准点,数据相似度部分用于确定最佳对焦位置,通过二者结合可有效解决开环控制自动对焦系统中迟滞误差严重影响对焦精度的问题。实验结果表明,与传统的自动对焦算法相比,该算法具有更强的抗噪能力、更高的精度和稳定性,可以很好地用于开环控制的自动对焦系统,适合农用机械的智能化运用。
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
摄影世界(2021年9期)2021-10-09
装备制造技术(2021年5期)2021-08-14
气象学报(2021年2期)2021-05-13
数学大世界(2020年2期)2020-03-07
价值工程(2017年31期)2018-01-17
山东工业技术(2017年24期)2017-12-29
大众摄影(2017年3期)2017-03-09
全球定位系统(2010年2期)2010-07-18
