论域自适应变化的不确定机械臂模糊补偿控制*
2023-03-02 06:43王凯
组合机床与自动化加工技术 2023年2期
王 凯
(河北工程大学机械与装备工程学院,邯郸 056038)
0 引言
机械臂的应用领域逐渐呈现多元化,正在由传统的制造业向航空航天、医疗、军事等领域扩展。机械臂高质量作业的前提是机械臂的高精度跟踪控制,但是机械臂模型不确定性、较强外界干扰严重影响机械臂的跟踪控制精度[1]。因此研究不确定机械臂的跟踪控制方法,具有较高的理论价值和应用价值。
机械臂跟踪控制的核心内容是设计关节力矩的控制律,在系统稳定的前提下使机械臂能够快速、准确地跟踪给定轨迹。常用的机械臂控制方法包括计算力矩法、PID控制、自适应控制、变结构控制、智能控制等方法。计算力矩法是根据期望轨迹和动力学模型计算出控制力矩的一种方法,但是当模型不准确或者存在干扰时,该方法控制效果较差。PID是一种经典控制方法,优点是不依赖模型,缺点是精度低、不适用于高速机械臂。自适应控制跟踪系统状态自适应调整控制律,优点是控制精度较高,缺点是计算量大、对控制器要求较高[2]。滑模控制是一种具有完全鲁棒性的非线性控制器,优点是鲁棒性好、不依赖模型,缺点是存在抖振问题[3]。智能控制是以神经网络、模糊逻辑为代表的一类控制方法,其特点是模拟人类的控制过程[4],此类方法需要一定的经验数据。黄建中等[5]针对机械臂在扰动工况下的变负载控制问题,设计了基于扩张状态观测器的滑模控制器,有效提高了控制系统的鲁棒性。张世轩等[6]将滑模控制、鲁棒控制、自适应控制结合,提出了多关节机械臂的自适应滑模鲁棒控制方法,试验仿真和样机实验验证了所提方法的有效性。PANE等[7]针对固定重复的、面向任务的机械手控制问题,使用强化学习算法补偿机械臂的未建模误差,该方法的控制性能好于PD控制、MPC控制等。随着机械臂应用领域越来越广泛,应用环境越来越复杂和多样化,单一控制方法难以满足控制要求,可以采用多种控制手段结合的方法提高控制精度。
本文针对机械臂在模型不确定和外界干扰工况下的控制问题,建立了机械臂系统的动力学模型,设计了论域自适应变化模糊补偿控制器,使控制参数论域范围能够随跟踪误差自适应变化,从而同时提高控制的精度和收敛速度,实现了不确定机械臂系统对期望轨迹的快速、精确跟踪。
1 机械臂建模与控制器方案
1.1 动力学建模
本文以二自由度机械臂为研究对象,如图1所示。图中,l1、l2分别为连杆1和连杆2的长度,m1、m2分别为连杆1和连杆2的质量,θ1、θ2分别为连杆1和连杆2的转角。
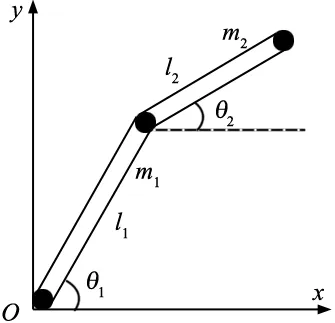
图1 二自由度机械臂
使用拉格朗日法建立该机械臂的动力学模型,拉格朗日方程[8]为:
(1)
式中,L为拉格朗日参数;T为机械臂系统动能;U为机械臂系统势能;θi为关节i的关节角;τi为关节i的力矩。
将机械臂系统的动能和势能代入式(1)中,可以求得该系统的动力学模型为:
(2)
(3)

1.2 模糊补偿控制器设计
针对1.1节给出的二自由度机械臂控制问题,首先基于动力学模型和期望轨迹,使用负反馈方式计算控制力矩。在理想情况下,基于负反馈的控制力矩实现较为精确的跟踪效果,但是由于机械臂模型存在不确定性,且在外界环境的干扰作用下,可能导致负反馈控制精度较低,甚至难以收敛。
针对模型不确定性和外界干扰问题,本文使用论域自适应变化的模糊控制法对模型不确定性和外界干扰进行补偿。论域自适应模糊控制的核心思想是:变量论域大小随跟踪误差变化而自适应变化,当跟踪误差较小时,使论域随之减小,相当于增加模糊规则数量而提高跟踪精度;当跟踪误差较大时,使论域随之增大,相当于减少模糊规则而提高收敛速度。基于上述分析和设计思路,设计的模糊补偿控制器框图如图2所示。

图2 模糊补偿控制器设计方案
2 论域自适应变化模糊补偿控制
2.1 论域自适应变化原理
论域自适应变化模糊控制的核心是:使输入输出参量的论域大小随跟踪误差自适应变化。起始阶段机械臂的跟踪误差较大,输入输出参数使用较大的论域,相当于减少模糊规则数量,可以使算法快速收敛;而后机械臂的跟踪误差减小,输入输出参数的论域随之减小,相当于增加模糊规则数量,可以有效提高跟踪精度。首先对双相线性基元组的定义进行明确,而后给出论域自适应变化方法。
定义:将论域X的一组模糊集记为{Ai},其中xi对应基元Ai的峰值,任意相邻基元定义为Ai和Ai+1,若Ai满足:
(4)
且当{Ai}为线性函数时,则模糊集{Ai}为论域X上的双相线性基元组。
在模糊补偿控制中,将系统输入设置为跟踪误差、误差变化率,输出记为Z,用于补偿力矩计算,则可以将模糊控制器视为一个双输入单输出系统。将跟踪误差论域记为X=[-E,E],模糊集记为{Ai},i∈(1,2,…,P);误差变化率论域记为Y=[-D,D],模糊集记为{Bj},j∈(1,2,…,Q);补偿力矩论域记为Z=[-U,U],模糊集记为{Cij}。其中{Ai}、{Bj}、{Cij}为双相线性基元组。将论域X、Y、Z的伸缩因子分别记为α(x)、β(x,y)、γ(x),则k时刻的伸缩因子为:
(5)

令k时刻论域Xk=α(xk)·Xk-1,则称Xk为自适应变化邻域,其直观含义如图3所示。

图3 变论域示意图
2.2 模糊规则与去模糊化
轨迹跟踪误差X和误差变化率Y的模糊集设置为负大、负小、零、正小、正大5个层次,即{NB、NS、ZE、PS、PB}。为了提高控制精度,将补偿力矩进行精细化划分,则将输出Z的模糊集设置为负极大、负大、负中、负小、零、正小、正中、正大、正极大9个层次,即{NVB、NB、NM、NS、ZE、PS、PM、PB、PVB}。使用三角隶属度函数对输入输出参数进行模糊化[9],跟踪误差、跟踪误差变化率的隶属度函数一致,如图4a所示;补偿力矩隶属度函数如图4b所示。
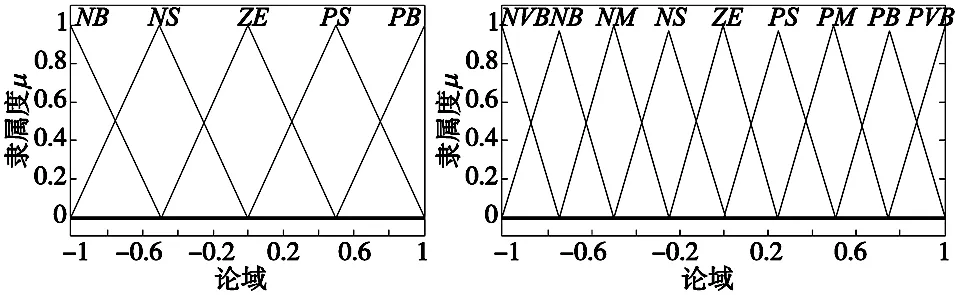
(a) 输入参数隶属度 (b) 输出参数隶属度图4 输入输出参数隶属度函数
使用Mamdain型推理制定模糊规则,结合一定量的实验结果和分析,制定模糊规则如表1所示。

表1 模糊规则
模糊控制输出依赖模糊规则库,即:
IfXisAiandYisBj,ThenZisCij
(6)
去模糊化方法较多,其中重心法包含了输出模糊子集所有元素的信息,因此计算比较精确[10]。本文选用重心法得到模糊控制输出为:
(7)
式中,ξ为模糊控制输出结果。
2.3 基于Lyapunov稳定分析的补偿力矩
(8)
结合式(2)和式(8),可以将误差跟踪系统方程转化为:
(9)

τf=Φ·ξ
(10)
式中,Φ为补偿力矩系数,其确定方法在后文推导。
(11)

下面基于Lyapunov函数[11]在保证系统稳定的前提下,设计补偿力矩系数Φ的自适应变化规律。将Lyapunov能量方程V设置为:
(12)
式中,V为能量方程;P为对称正定矩阵,设置合适P矩阵,使得PA+ATP=-Q,Q为正定对角阵;η>0为常值系数。
对上式求导,得:
(13)
将式(11)代入式(13),整理得:
(14)
(15)
由式(15)可得Lyapunov稳定前提下的补偿力矩系数Φ自适应变化律为:
(16)

根据式(8)和式(16)给定的模糊补偿控制律,得到机械臂系统的模糊补偿控制框图如图5所示。
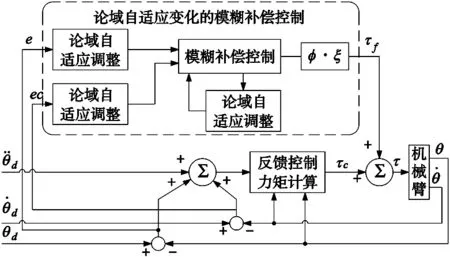
图5 机械臂系统的模糊补偿控制框图
3 仿真验证与分析
3.1 与传统模糊控制比较
分别使用论域自适应变化的模糊补偿控制、传统模糊补偿控制进行机械臂轨迹跟踪,模糊补偿控制器的参数设置为:系数k1=1.2、k2=1、t=0.5,η=0.1,输入输出参数的初始论域均设置为[-3,3]。传统模糊补偿控制结果如图6所示。

(a) 关节1跟踪轨迹 (b) 关节2跟踪轨迹
基于论域自适应变化的模糊补偿控制效果如图7所示。

(a) 关节1跟踪轨迹 (b) 关节2跟踪轨迹
由图7d可知,论域伸缩因子可以随误差自适应变化,当跟踪误差值较小时,伸缩因子也较小,有利于提高控制精度;当跟踪误差较大时,伸缩因子也较大,有利于提高算法的收敛速度,实现了论域的自适应变化。对比图6a~图6c与图7a~图7c可知,论域自适应变化模糊补偿控制精度明显由于传统模糊补偿控制精度,为了进行定量比较两种控制器的精度,统计最大跟踪误差和均方差误差如表2所示。

表2 跟踪误差统计
由表2中数据可知,与传统模糊补偿控制相比,在论域自适应模糊控制作用下,关节1的最大跟踪误差减小了2.70倍,均方根误差减小了2.73倍;关节2的最大跟踪误差减小了2.62倍,均方根误差减小了3.45倍。以上数据说明,论域自适应模糊控制的控制精度远高于传统模糊控制方法,这是因为论域随跟踪误差自适应变化,可以适时有效地平衡控制精度和收敛性。
3.2 与现有控制算法比较
按照3.1节设置的跟踪任务和场景,使用文献[12]中的神经网络滑模跟踪控制方法与本文方法进行比较。文献[12]中使用RBF神经网络对模型不确定项和外界扰动进行估计,并使用全局PID滑模控制器设计控制律。为了节省篇幅,在此仅给出神经网络滑模控制对关节1和关节2的跟踪误差,结果如图8所示。

图8 文献[12]方法跟踪误差
对比图6c、图7c、图8可知,使用传统模糊控制进行补偿时,其跟踪误差周期性变化,说明对模型不确定性和外界干扰的估计具有周期性误差;使用论域自适应模糊控制和文献[12]中RBF神经网络进行补偿控制时,跟踪误差均为收敛的,说明两种方法对模型不确定性和外界干扰的估计与补偿控制是收敛的;论域自适应模糊控制的最大跟踪误差远小于文献[12]中方法,且收敛时间也略小于文献[12]方法,说明论域自适应模糊补偿控制的估计补偿精度高、收敛速度快。
统计文献[12]中控制方法的轨迹跟踪误差最大值和方均根值,并与论域自适应模糊控制相比较,结果如表3所示。

表3 跟踪误差统计
由表3可以看出,论域自适应模糊补偿控制的跟踪控制精度高于文献[12]神经网络滑模控制。结合图7c和图8的对比,这是因为论域自适应模糊补偿控制对模型不确定性和外界干扰的估计精度和速度均优于神经网络估计。从理论的角度讲,这是因为在本文模糊补偿控制方法中,参数论域随跟踪误差自适应变化,当跟踪误差减小时,论域随之减小,有利于提高控制精度;当跟踪误差增大时,论域随之增大,有利于控制过程快速收敛。
综合3.1节和3.2节的对比与分析可知,针对不确定机械臂在扰动工况下的控制问题,论域自适应模糊补偿控制是有效的,且在控制精度和收敛速度上具有一定的优越性。
4 结论
本文研究了不确定机械臂在扰动工况下的轨迹跟踪控制问题,设计了论域自适应变化的模糊补偿控制器。经仿真验证得出以下结论:与传统模型控制相比,论域自适应模糊控制的控制精度更高,说明论域自适应策略能够有效提高模糊控制的控制精度。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年10期)2018-11-25
宇航计测技术(2018年3期)2018-09-08
物联网技术(2017年7期)2017-07-20
西南交通大学学报(2016年3期)2016-06-15
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
体育科学研究(2015年5期)2015-02-28