机载LiDAR在山区1∶500地形图测绘中的应用
2023-03-06 09:46汪家意田泽海
智能城市 2023年12期
汪家意 王 君 田泽海
(广州市城市规划勘测设计研究院,广东 广州 510060)
1∶500地形图测绘是国土空间规划的重要基础数据,精度要求高,测图时需要获取地面精准的高程信息。以往采用全野外数字化地形图测绘,先进行图根控制测量,再利用全站仪在图根控制点上摆站,施测所有可见的要素,内业计算出碎步点并打印白纸图到外业实地连线并进行属性调查,最后根据成图要求基于成图平台进行内业成图,外业工作量大、作业效率低、可达性不足。倾斜摄影数字化地形图测绘是近几年兴起的一种作业方法,在地面进行像控点测量,利用无人机搭载五镜头相机获取影像数据,再基于内业处理软件进行空三加密与优化、模型构建、纹理映射、模型修饰与优化等操作,相较于全野外数字化地形图测绘的方法,外业工作量大幅度减少,作业效率显著提升[1-2],但成果精度易受天气、光线等因素影响,同时无法应用于采密集建筑、植被茂密等有遮挡的区域,因此难以应用于山区大比例尺地形图测绘。倾斜摄影测量与全野外数字化地形图测绘都有各自的优缺点,当前主流的全野外数字化地形图测绘方法是将两种方法结合,在视野开阔的无遮挡区域,如施工地、路面、水系等区域使用倾斜摄影测量的方法作业,在植被遮挡严重和建筑密集区域使用全野外的方法作业。这种方法能够减少外业工作量,应对大部分的大比例尺地形图测绘应用场景[3-4]。但在山区大比例尺的地形图测绘应用场景下,整个区域的植被遮挡都较为严重,倾斜摄影仅能采集少量的要素,大部分工作量都需要全野外完成,严重影响工作效率。机载激光雷达技术发展迅速,已初步应用于测绘类项目生产实践,为植被茂密、遮挡严重的山区大比例尺地形图测绘提供了一种新的解决方案。本文利用机载LiDAR辅助山区大比例尺地形图测绘生产,无须布设像控点,数据采集效率高,能够透过植被之间的缝隙穿透到地面,获取到地面高程数据。
1 项目概况
航线规划与参数设置如图1所示。

图1 航线规划及参数设置
测区面积约0.6 km2,属于典型的广州山区,植被茂密、地物复杂、高压线路交错,地物以树木为主。广河高速横穿测区,高差大约100 m,局部坡度在10°以上,地形类型包括平地、丘陵、山地,其中山地占比远大于其他地形类型,可将整个区域视作山区。项目使用华测BB4无人机搭载华测AU20激光雷达系统进行数据采集。
2 项目实施流程
项目的技术流程主要包括前期准备、外业数据采集、点云数据处理、机载LiDAR点云辅助测图、生产1∶500地形图。项目技术流程如图2所示。
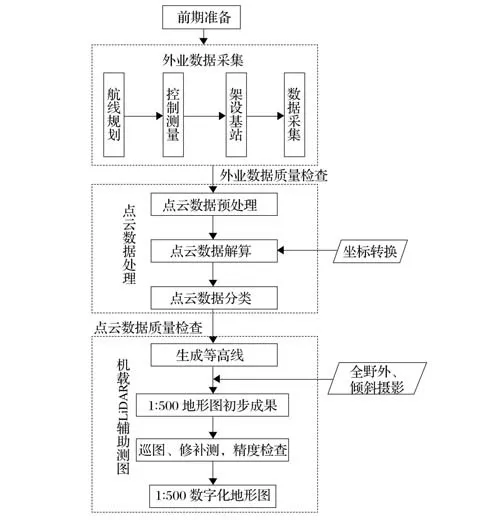
图2 项目技术流程
2.1 前期准备
收集测区内已有的地形资料并进行现场踏勘、飞行计划制订等。航飞点云采集参数如表1所示。

表1 航飞点云采集参数
2.2 外业数据采集
航线规划与参数设计:保证获取的数据涵盖测区范围,确定航飞采集的点云密度,即单位面积内点云的平均采集量,保证点云密度符合1∶500地形图技术要求。
控制测量与架设基站:用于数据解算与坐标转换。坐标转换需要至少利用外业数据采集的4对均匀分布于测区内的坐标转换点,将点云成果转换至目标坐标系。
2.3 点云数据处理
利用LiDAR360、华测CoProcess等软件对外业质量检查的原始点云数据进行处理,主要包括点云数据预处理、点云数据解算、坐标转换、点云软件噪声点滤除、航线重叠区处理、自动分类、人工干预精细化分类提取地面点云数据等。
2.4 机载LiDAR点云辅助测图
利用经过数据处理的地面点云数据,进行等高线测制、高程点采集以及遮挡区域辅助判断。
2.4.1 软件自动生产等高线本文是将数据处理后的点云数据直接导入eps软件,利用软件中的生成等高线功能生产等高线。
2.4.2 人工辅助修线与高程点数据采集
自动生成的等高线未切割路面、斜坡等区域,且存在大量尖锐角,美观性欠佳。对于自动生成的不平滑等高线,会产生大量的修线工作量,不利于项目的推进以及高效率的生产要求。
本文采用两种方法处理等高线折点多、尖锐角突出的问题。方法一是基于ArcGIS的平滑线操作,在导eps修线之前增加了一步预处理,本次预处理是在ArcGIS中操作,利用软件中3DAnlyst工具的“平滑线”功能对等高线进行平滑处理,平滑容差需要根据图幅地势的具体情况试验选取最佳值。方法二是基于eps的平滑线操作,直接使用eps的自带平滑线功能,选择合适的平滑参数进行自动修线工作,平滑后还存在明显尖锐角区域进行人工手动再修线的工作,手动再修线区域可保留计曲线,首曲线通过修线后的计曲线内插得到。
方法一修线成果相对更平滑,但方法二不需要多格式、多软件来回转换使用,本项目的最终成图是基于eps平台,经过软件与人工修线后的等高线成果平滑美观、无尖锐角。
修线前、后对比如图3所示。
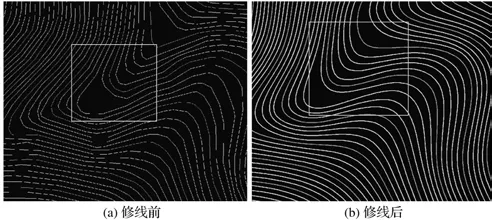
图3 修线前、后对比
2.4.3 结合三维模型
在eps中加载三维模型,利用分屏裸眼3D测图,内业采集其他要素。
2.4.4 外业调绘补充属性数据以及采集倾斜摄影和机载LiDAR
无法采集的要素,对于大面积缺失的区域使用全野外数字化的方式采集要素。
2.4.5 内业成图
利用eps平台按照成图标准内业成图。
3 项目成果分析
3.1 地面点云密度分析
1∶500地形图测量中对于地面点云密度还没有相关要求,故参考使用《机载激光雷达数据获取技术规范》(CH/T 8024—2011)[5]中对1∶500内插数字高程模型数据的点云密度要求。
测区面积为0.6 km2,实际航飞采集点云覆盖面积0.9 km2,经过分类后的地面点数量约3 000万个,地面点平均点云密度约32 点/m2,符合《机载激光雷达数据获取技术规范》(CH/T 8024—2011)中要求的16 个/m2。水面等区域地面点数据空白,但计算地面点平均点云密度时将水面的面积计算在其中,实际地面点平均点云密度更大。
3.2 地面点精度分析
针对生产的地面点,利用全站仪、RTK实地外业采集了部分检测点验证点云数据的成果精度,按照同精度检测统计最终的精度。
本次外业实地采集的108个检测点全部分布在山区,地面基本都有植被覆盖遮挡。实际的精度分析方法是利用已有的点云成果先预生成等高线,再将检查点与同一等高线范围内的最近点云成果进行对比,不选取与检查点不在同一等高线内的点云数据。相较于直接与检查点最近点云高程比较,本方法可进一步降低检测误差,确保山区地面点云位置与检查点之间未发生较大的高程变化。点云高程精度要求参考《城市测量规范》(CJJ/T 8—2011)[6]中山区1∶500地形图等高线插求点的高程精度要求,即高程中误差约等于33 cm。
山区的原始检查点有108个,其中14个检查点位于山区与路边相连的斜坡顶的双线沟渠底部。沟渠太窄且有茂密的草丛遮挡,点云无法穿透到水渠底部,统计时剔除了此类数据,因此最终参与统计的山区检查点数量为94个。
本方法检测得到点云的高程中误差为12 cm,能够满足规范要求。
3.3 成图精度分析
本项目的点云高程精度符合山区1∶500地形图成图要求,因此可以对地面点云成果进一步处理成图,成图高程中误差不得超过33 cm,特殊困难地方可以放宽50%。
本文利用外业采集的实测点作为检查点,与相应位置等高线插求点进行对比,统计分析了成图精度,均采用同精度统计,中误差按照33 cm进行计算,检测的粗差率、高程中误差都满足规范要求。成图精度检查如表2所示。

表2 成图精度检查
局部成果如图4所示。
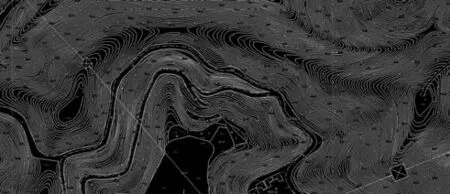
图4 局部成果
4 结语
本研究的地面点云密度、高程中误差都能满足规范要求,最终的成图高程中误差为14 cm,不仅能够满足山地成图要求,还能够满足建筑区和基本等高距为0.5 m平坦地区的成图高程精度要求,为山区大比例尺地形图测绘生产提供了一定的参考。但机载激光设备通常造价昂贵,一些小型测绘作业队伍难以承担如此高昂的成本支出,是机载激光雷达技术辅助测图未来大规模应用推广的重点问题。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
西部交通科技(2021年9期)2021-01-11
广东教学报·教育综合(2019年87期)2019-09-10
国际呼吸杂志(2019年4期)2019-03-12
测绘通报(2019年1期)2019-02-15
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
地理教育(2016年10期)2016-11-09
中国房地产业(2016年2期)2016-03-01