
基于TCMS 数据的地铁电客车制动故障分析与根除
2023-03-07 06:08卢亚芳
设备管理与维修 2023年3期
卢亚芳,张 玉
(1.南京地铁运营有限责任公司,江苏南京 210046;2.安徽工业大学管理科学与工程学院,安徽马鞍山 243032)
0 引言
南京地铁轨道交通2 号线于2010 年的5 月开通,该线路地铁电客车是由中车南京铺镇车辆有限公司生产制造,其地铁电客车的列车网络控制系统(Train Control and Management System,TCMS)和制动系统使用了法国阿尔斯通(ALSTOM)公司的产品设计方案、牵引系统则使用了德国克诺尔公司的设计方案。该线路地铁电客车使用的TCMS 系统、牵引系统、制动系统在保证地铁车辆安全正点运行中起着关键作用。该线路地铁电客车自投入使用,运营期间内在手动模式下曾多次出现无法牵引、制动不缓解的问题,导致该线路正线救援事件频次的增加。在手动模式下地铁电客车无法牵引制动问题的发生,对电客车的日常安全运行存在较大安全隐患。
1 原因分析
1.1 牵引制动故障
在2020 年3 月19 日10:35 信号楼报061062 次地铁电客车在洗车回库的途中,061A 端手动模式下,该电客车司机对电客车实施制动后电客车不减速,对此司机通过拍蘑菇(一种紧急停车的装置)进行紧急制动,紧急制动后推动电客车的牵引,却发现制动不缓解无法动车,随后电客车司机经多次牵引、制动操作后电客车的牵引、制动才恢复正常。2020 年4 月17 日09:13信号楼报回库的061062 次电客车再次出现牵引制动故障,电客车司机在061A 端手动模式下时无法正常驾驶,司机只好改为紧急牵引模式动车回库。2020 年5 月4 日12:06 行车调度中心来电,1508 次电客车在云锦路段报061A 端手动模式下发生牵引制动故障。2020 年6 月17 日18:38 在马群转轨时,电客车司机报手动驾驶模式发生故障,司机经过转换模式开关、断合KS 后均无故障改善效果,最后改为紧急牵引模式动车回库。2020 年8 月6 日4:31 行车调度中心报061A端手动驾驶模式发生故障,此故障原因是因电客车无牵引制动力。
1.2 电客车的车辆数据分析
如图1 所示,电客车司机制动信号已经发出,此时制动需求为2.488 V,但是图中可以看出没有电制动与气制动完成量,气制动没有施加,随后电客车司机拍蘑菇进行紧急制动。如图2 显示紧急制动后,电客车司机多次对列车进行牵引操作,且牵引信号均已发出,牵引需求为3.775 V,但图中并未看到牵引力完成量,且气制动没有缓解,经多次牵引制动后故障消失,地铁车辆恢复正常运行。
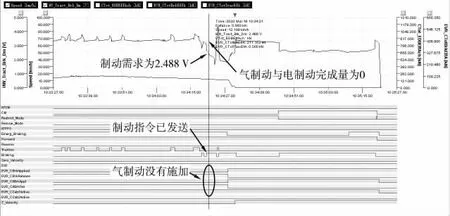
图1 列车事件记录仪(EVR)数据1
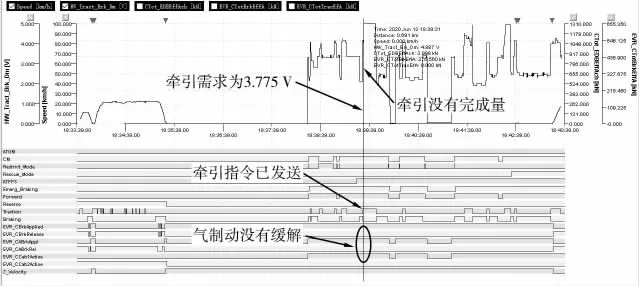
图2 列车事件记录仪(EVR)数据2
通过上述2 组数据比对发现,电客车不论是在牵引还是制动工况下,从列车事件记录仪(EVR)数据中可看出,各项必要条件均已发出,但牵引和制动系统均没有执行发出的牵引、制动指令。对此情况进行分析,如果只是牵引系统没有收到网络指令的情况,在制动工况下牵引系统也许不会施加电制动,但不应该影响气制动进行补偿;或在牵引工况下也许会没有牵引力,但不应该影响气制动缓解。因此考虑TCMS 或许并没有发出牵引或制动指令,或TCMS 的判断并不符合牵引或制动指令发出的条件。2020年5 月4 日和2020 年6 月12 日地铁列车司机显示单元(Driver Display Unit,DDU)都报了手动驾驶模式故障,但在MPU(微处理器)中没有相关事件记录,考虑TCMS 判断牵引或制动指令的条件与该故障会有一定联系。
1.3 手动模式故障的原因及影响
如图3 所示,关于手动驾驶模式故障判定逻辑中可以发现:当在人工模式下TCMS 对故障的判断逻辑是,如果收到LI_ATOEffDmd1_<cab>或LI_ATOEffDmd2_<cab>信号就判定VB_TBS_EffDmdValid 为0,当该变量为0 且该司机室的司机控制器激活情况下,TCMS 就会报手动驾驶模式故障。

图3 手动驾驶模式故障判定逻辑
如图4 所示,手动驾驶模式故障对牵引与制动指令的影响:当TCMS 判定到VB_TBS_EffDmdValid 值为0 时,向网络发送惰行指令(MPU_CEffDmd=0、MPU_CDemCoast=1、MPU_CDemTract=0、MPU_CDemBrak=0、MPU_CDemFastBrk=0)。
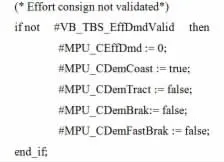
图4 手动驾驶故障下牵引与制动的关系
因为RIOM2A 和RIOM3A 采集AMR2 的信号LI_ATOEffDmd1、LI_ATOEffDmd2 对VB_TBS_EffDmdValid 值的判定有直接影响,而VB_TBS_EffDmdValid 的值又间接影响了牵引与制动指令的判定,因此判断此故障为AMR2 继电器故障或串电导致LI_ATOEffDmd1 或LI_ATOEffDmd2 信号异常。
2 故障验证与处理
2.1 故障验证
因手动驾驶模式故障问题并不是持续存在,故无法捕捉到其故障下电客车的车辆数据,因此通过故障模拟的形式进行故障还原,并对电客车故障时的车辆数据进行实时监控。如图5 所示,以飞线的方式模拟手动驾驶模式下的故障逻辑,使输入信号LI_ATOEffDmd1=1,此时手动模式推动牵引VB_TBS_EffDmdValid_1=0,DDU 将会显示手动驾驶模式故障,TCMS 则只发出惰行指令。

图5 手动驾驶模式故障逻辑模拟
2.2 故障处理
后续通过在TCMS 数据流中植入“种子”,在2020 年8 月6 日此类故障再次出现时,捕捉到了电客车的车辆异常数据(图6)。根据该故障异常数据确定了手动驾驶模式下LI_ATOEffDmd2_1 信号异常为高电平,更换了AMR2 至RIOM3A 的LI_ATOEffDmd2_1 故障线缆。
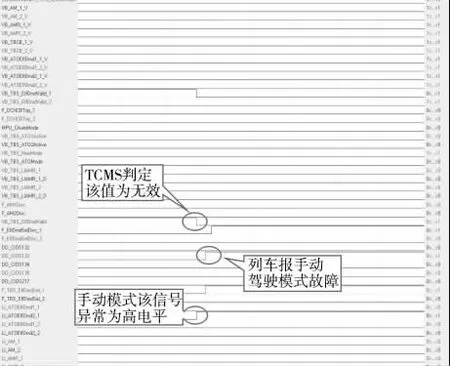
图6 故障后的异常数据
3 问题与解决方案
3.1 存在的问题
由于在手动驾驶模式下发生故障后,系统会直接给出惰性的网络指令,致使地铁车辆不能按照驾驶司机要求的控制方式对电客车的牵引及制动进行控制,此问题对日后地铁车辆的日常运行构成极大的安全隐患。
3.2 解决方案
(1)故障判断逻辑进行修改:通过将手动驾驶模式故障的判断逻辑由RIOM2A 和RIOM3A 采集AMR2 的信号LI_ATOEffDmd1、LI_ATOEffDmd2,“或”的关系变更为“与”的关系,即在手动驾驶模式下,上述两个信号同时都为高电平时就判定为手动驾驶模式故障。通过对故障判断逻辑进行修改,修改前后结果对比发现,修改后使该故障的判定更加严谨。
(2)故障后传达指令进行:将手动驾驶模式故障发生后传达的网络惰性指令改为制动指令,降低了电客车在运行中的安全风险。
4 结语
牵引制动指令是地铁电客车安全运行的必要条件,南京轨道交通地铁2 号线在手动驾驶模式下出现故障问题时会强制给出惰性指令,进而导致电客车司机推动牵引与制动后列车对此无反应。鉴于此故障对电客车的行车安全性具有重大影响,因此对TCMS 故障判定的控制与管理逻辑进行优化改善。通过上文对故障判断逻辑及指令传达进行改进,改进前后运营数据的比对与跟踪可发现,该设计方案可以有效解决手动模式下的故障问题。
猜你喜欢
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
测控技术(2018年5期)2018-12-09
汽车观察(2018年10期)2018-11-06
北京汽车(2017年3期)2017-10-14
小学生导刊(2017年17期)2017-05-17
电信科学(2016年10期)2016-11-23
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
