无刷直流电机无位置传感器的优化控制方法
2023-04-01 07:33钟海峰吴宇
电子制作 2023年5期
钟海峰,吴宇
(江西理工大学 电气工程与自动化学院,江西赣州,341000)
0 引言
近年来,无刷直流电机以其效率利用率高,环保性好,调速性能优异等,得到了越来越广泛的应用。无刷直流电动机的换相是电子控制的,其主要核心是其安装的位置传感器,根据位置传感器的准确性和使用寿命,外界环境等客观因素的影响会导致电机的成本和性能的波动。故其无位置传感器逐渐成为热点的研究话题之一。本文着重于无刷电机过反电动势零点问题和衍生出的换相启动问题进行分析,优化无位置传感器控制方法,简化剔除了滤波,模拟/ 数字转换器采样端电压等操作,以达到换相精准,稳定性好,简单迅速等目标。
1 原理分析
1.1 无刷直流电机原理
无刷直流电动机的控制框图如图1所示,由霍尔位置传感器信号,功率开关单元信号和控制单元组成。功率开关单元将电源的功率以一定逻辑关系分配给无刷直流电机的定子各相绕组,使电动机产生持续不断地转矩,而功率开关单元的导通和其导通时间控制由霍尔传感器的信号来决定。此处将无刷直流电动机假设为星型接法,采用的是两两导通工作方式,每只开关管导通120°电角度,每隔60°电角度就有一个开关管关断,定一个开关管导通,即工作过程中一定有一个桥臂上的两个开关管灯关断,另外两个桥臂的上下桥臂只有一个开关管导通,同时不考虑集肤,磁滞效应等影响。其控制框图如图1所示。
由相电压,相电流,反电动势和各绕组的自感互感关系,可以从无刷电机关断一相的端电压波来获取反电动势过零点等信息。根据文献[2]和图1可知各相端电压表达式:
其中Ua、Ub、Uc为电机的三相定子绕组的各端电压;L=Ls-Lm(Ls为电机定子绕组自感,Lm为电机定子绕组互感) ;ia、ib、ic分别为电机的三相定子相电流;ea、eb、ec为电机三相绕组反电动势;Un为电机实际的中性点电位。
1.2 反电动势过零分析
系统运行时,假设B相上桥臂导通,C相下桥臂导通,A相处于断开状态。则有BC相通电,由(1)式可知此时的ABC三相端电压关系变化为式(2):
此时为BC通电,就两者反电动势和电流之间的关系:
综上(1)、(2)、(3)、(4)可得:
其实此时B相上桥臂在PWM ON时,图1的VT3和VT2导通使Ub和Ud相同(Ud为端电压幅值),而Uc为0,则也会有:
此时把式(5)代入式(2)中有:
以上式(6)和式(7)关系可知:在A相反电动势的为零时,则此时的端电压波形幅值正好为Ud/2 。
所以由此原理可以推断出,在两两导通的模式下将中性点电压与未导通相的端电压对比可以确定反电动势的零点,因为此时中心点的电压Un就为Ud/2 。
但是实际的中心点在电机结构内部,无法通过物理手段将其引出,所以我们需要在外部设计硬件电路模拟中性点,再将此模拟的中性点与检查反电动势做对比即可。故采用重构中性点方法来模拟,根据图2运用叠加定理和结合式(1)可知重构中心点电压为:

图2 重构中性点
其中xe为关断的X相对应的反电动势。
则可推测关断电压的表达式:
由(8)和(9)两个式子可知,Ux<0的时候,Usum>而反电动势检测电路输出低电平,而当Ux>0时,反电动势检测电路,输出为高电平,完成一个电平跳变。故用比较器检测反电动势检测电路的输出跳变就可以确定反电动势过零点的时刻。图3为设计的反电动势检测电路。图4 为反电动势和各相比较器输出关系。
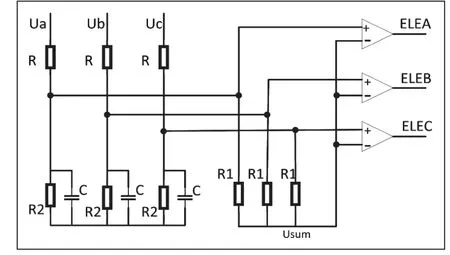
图3 反电动势过零点检测电路
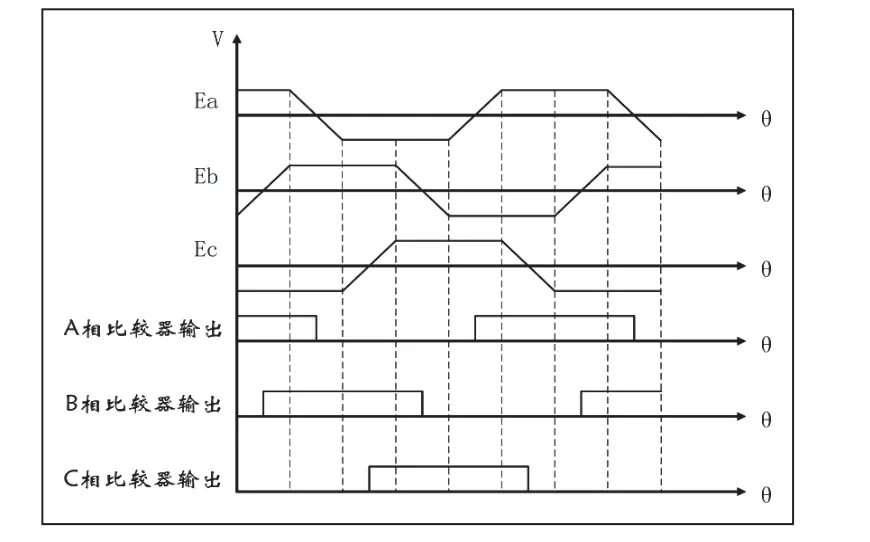
图4 反电动势和各相比较器输出关系
1.3 电机启动分析
以上分析可知能通过反电动势过零点信号来进行换相点的标记,从而进行换相,一般采用三步法启动,但是三步法启动电机时有转速脉动大等缺点。本文给出最多通过两个导通状态就能检测过零点信号,从而快速启动的方法,解决此问题。下面进行举例说明:
此时转子的位置如图5所示,通入电子的电流为B相流入C相流出,则产生的磁动势F1将会促使转子向图6位置方向移动,但是此过程中在A相检测不出反电动势过零点信号,此时磁动势F1带动不了转子转动。
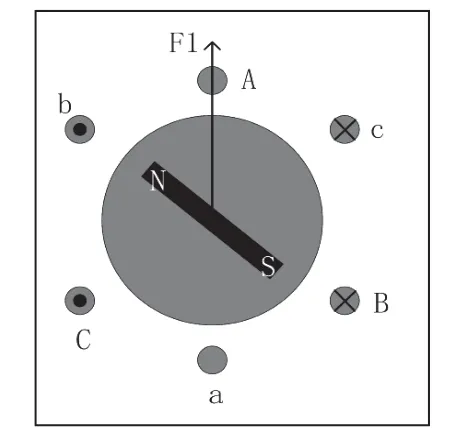
图5 转子位置1
而此时可以改变定子电流流通相序,即将定子电流从C相流入,A相流出,其产生的磁动势F2如图6所示,此时检测B相上反电动势过零点信号,刚到达图7位置时则B相反电动势过零点信号跳变,则在延时30°电角度作为换相点进行换相,从而可以快速启动电机。
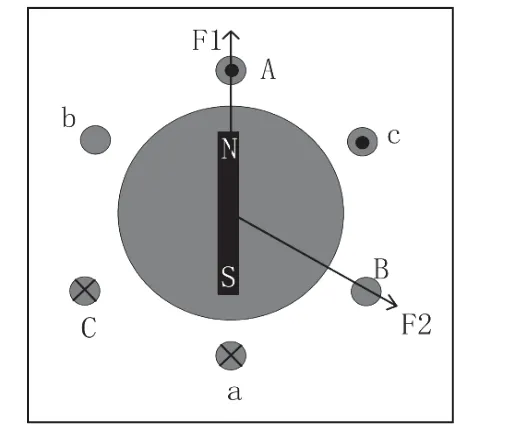
图6 转子位置2
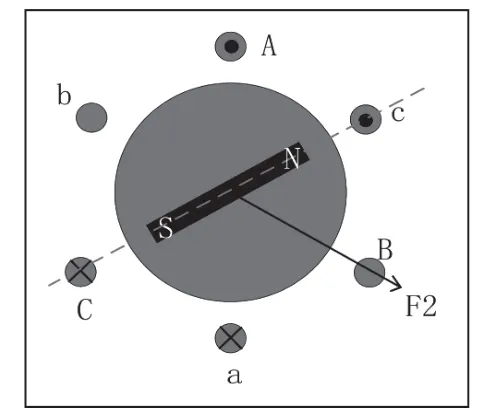
图7 转子位置3
而当转子位置如图8时,此时定子电流是由B相流入,C相流出,所产生的磁动势F3会带转子经过虚线位置,而经过此位置时,会检测到A相的反电动势的跳变,即可确定其反电动势过零点,经过一次导通检测,就确定了转子位置就能正常启动了。
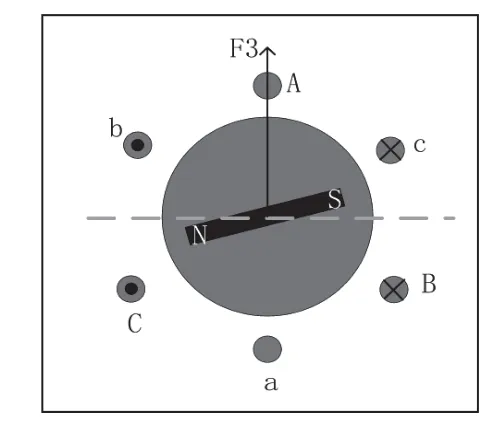
图8 转子位置4
结合两种情况可知,最多通过两个导通状态就能确定反电动势过零点,可以确定转子位置,从而能够快速地启动电机。
2 实验平台搭建
具体的实验平台搭建如图9所示,包括开关电源,无刷直流电机驱动电路,反电动势过零点检测电路,被控对象无刷直流电机,还有测相应波形的示波器。其中驱动电路所用的主控芯片是STM32F103C8T6型号的单片机;比较器所用的型号为LM324,此比较器可以进行真正意义上的差分输入,可以在3.0~32V的工作电压下运行,检测反电动势过零点信号;选用的无刷直流电机极对数为2,额定功率为35W,额定电压24V,额定转速2500r/min。
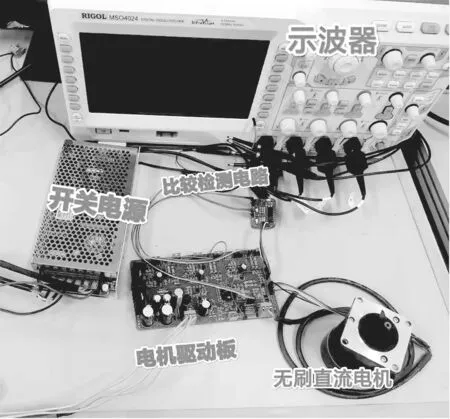
图9 实验平台
3 实验结果分析
3.1 原理验证分析

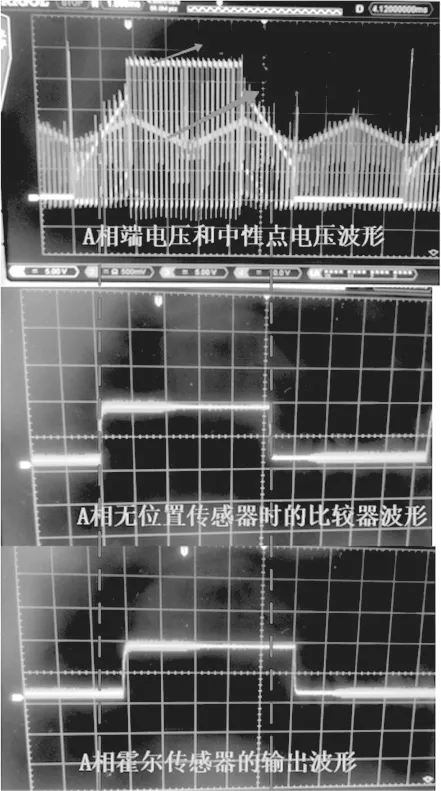
图10 实物波形图

图11 仿真波形图
再观察比较器在PWM通道上输出的电平和用霍尔传感器测试的A相输出电平,比较可知,霍尔传感器发出的换相信号和电动势过零点信号延迟30度后完全重合,即说明此控制方法的可行性,从而实现无位置控制。
3.2 实践效果分析
图12和图13为有位置传感器和无位置传感器两种控制方式下的速度波形,程序中采用了自抗扰控制(ADRC)代替了传统的PID控制,使得控制更加精准,信号识别能力更强,抗干扰能力更优。
图12为无位置传感器控制方式在ADRC方式下的速度波形,于0.85s时反馈速度就达到给定速度要求。对比两图可知,两种控制方式都具有上升过程稳定,超调量十分小等优点,均能满足快速平稳达到给定速度并稳定保持的要求。

图12 无位置传感器的转速波形
图13为有位置传感器控制方式在ADRC方式下的速度波形,于0.7s时反馈速度就达到给定速度要求。

图13 有位置传感器控制的转速波形
对比两图可知,两种控制方式都具有上升过程稳定,超调量十分小等优点,均能满足快速平稳达到给定速度并稳定保持的要求。
4 总结
本文通过未导通相端电压和中性点电压进行比较,取比较输出的跳变处为反电动势过零点信号,在延迟30°电角度确定换相点,从而进行换相操作。同时也设计了最多通过两个导通状态就能快速启动电机的方法。最后验证了原理推导的正确性,配合ADRC测试比较了有无位置传感器电机运行的各自状态。实践分析证明了:此方法不用考虑滤波电路和换相检测精度等问题,无需额外供电,节约了成本,性能也更强大。
猜你喜欢
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
水电站机电技术(2017年9期)2017-09-26
山东工业技术(2016年15期)2016-12-01
微特电机(2016年3期)2016-11-29
电力建设(2014年8期)2014-04-16
江苏通信(2014年4期)2014-04-14
河南科技(2014年18期)2014-02-27
河南科技(2014年16期)2014-02-27
科技视界(2012年18期)2012-08-16