
面向精细化导航的城市道路网末梢扩展
2023-04-06 10:10袁嘉铭余华飞
北京测绘 2023年2期
袁嘉铭 杨 敏 余华飞 赵 炜
(武汉大学 资源与环境科学学院, 湖北 武汉 430072)
0 引言
在智能交通、自动驾驶、高效位置服务等技术需求驱动下[1],导航技术的发展呈现出两大趋势:一是由室外转向室内[2],二是在高精地图支持下的精细化导航[3]。其中,高精地图相比较传统地图对道路实体的表达精细度大大提升。这种精细度不仅体现在道路数据内容拓展到车道级,道路网的覆盖面也需大大增强[4]。现有导航地图道路数据主要描述城市的主干道层次,其末梢仅触及社区、大院的外部,仍缺乏社区内部的路网分支信息。这一问题容易引起导航结果无法满足社区内住户的出行、物流等需求,进而产生了“最后一公里”导航盲区问题。由于围墙,栅栏等障碍物在空间上分割了社区的内外路网,使得社区间产生了封闭性[5]。2016年中共中央国务院印发《关于进一步加强城市规划建设管理工作的若干意见》,提到已建成的住宅小区和单位大院要逐步打开,实现内部道路公共化,解决交通路网布局问题[6]。然而,现阶段在城市化建设中去打通社区之间的封闭性暂时难以完全实现。
细粒度道路网是在城市社区、大院内建筑物之间的通路,基本特点是路段长度普遍较短但空间分布较为密集,作为居民与城市主干道之间的过渡路段出现。它们在城市道路网中大量分布,对城市规划、交通模式研究有重要意义[7]。针对细粒度道路信息的提取,现阶段主要存在两种不同类型的方法:基于栅格影像数据进行提取和基于车行全球定位系统(global positioning system,GPS)数据提取。其中,基于栅格遥感影像数据的道路提取算法在算法模型的构建上要求为极为复杂,对原始影像数据的分辨率也要求较高,并且对数据噪声敏感[8]。基于车行GPS数据的道路提取方法只能提取出含有行车功能的道路段数据,缺少细粒度道路段中以步行功能为主的道路网[9]。
由于上述两种细粒度道路提取方式存在着诸多问题,本研究尝试基于社区建筑物数据提取内部道路数据的策略。具体地,通过Delaunay三角网支持下的邻近分析来提取社区内建筑物之间的通道,并将提取的社区内部道路衔接到城市主干道路网中,同时结合道路语义信息进行高精度地图的构建,最终实现道路网末梢在社区内部区域的补全。
1 方法
如图1所示,本研究提出的方法包括边界数据预处理、细粒度道路分支结构提取,道路数据的融合加工三个基本步骤。
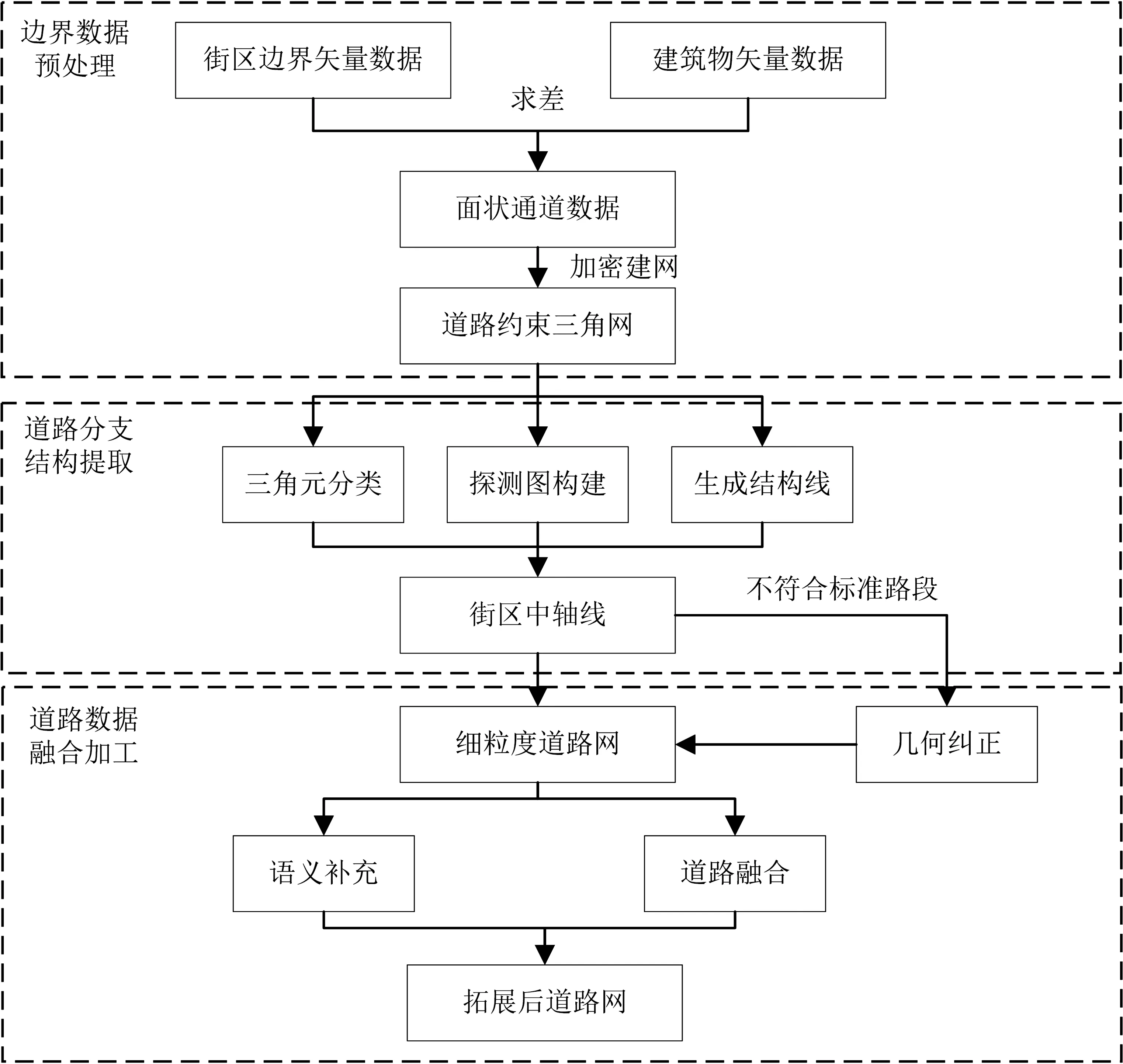
图1 精细粒度道路分支结构提取与融合框架
(1)边界数据的预处理。首先通过对街区边界数据与社区内建筑物数据进行求差,建立面状通道数据,然后根据建筑物数据的边界几何属性对源街区数据边界进行加密预处理。
(2)细粒度道路分支结构提取。利用约束Delaunay三角网进行街区道路结构线提取。该步骤将复杂的街区面状要素之间隐含的语义信息进行抽象与提取[10],继而得到街区道路细粒度的分支结构。
(3)道路数据的融合加工。将提取到的道路网分支结构按综合规则进行几何形态的调整,再对优化后的道路段进行语义信息的添加,并融合到现有的道路网体系中。
1.1 边界数据预处理
首先,对街区面状要素数据和社区内建筑物数据进行叠置分析求差,获取面状通道数据,如图2所示。后一阶段,进一步提取面状通道的中轴线作为社区内部的道路结构线。其中,街道中轴线提取的关键思想是探测边界之间的邻近关系,进而对不同段处街区边界进行识别配对[11]。Delaunay三角网在空间邻近分析上是一种较好的支持模型,在多边形群的合并、地图综合冲突关系探测与移位处理[12]、地貌形态分析中[13],取得了令人满意的结果。因此,本文利用Delaunay三角网探测面状通道节点间的邻近关系并提取中轴线。为保证构建的三角网能具有更好的边界邻近关系探测能力,实验中会对通道的边界依据等长距离进行点要素增密处理,加密距离计算见式(1)。
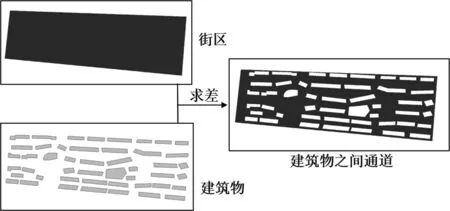
图2 提取面状通道
(1)

1.2 道路分支结构提取
如图3所示,对加密处理后的面状通道节点构建Delaunay三角网模型。在此基础上,三角网中三角元进行分类,依据三角元的分类情况进行街区结构线的构建与提取。
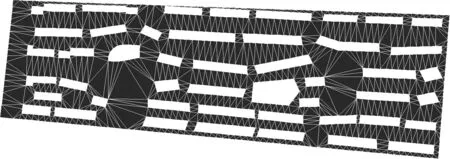
图3 三角网构建
(1)三角元分类。参考三角元与其相邻三角元的关系,对三角网中的每个三角元进行分类。如图4所示,只有一边有邻接的三角形定义为I类,三角形的两条边均存在邻接的三角形则定义为II类,三角形三条边存在邻接三角形则定义为III类。注意边界在街区外围上的三角元不计入邻边统计。
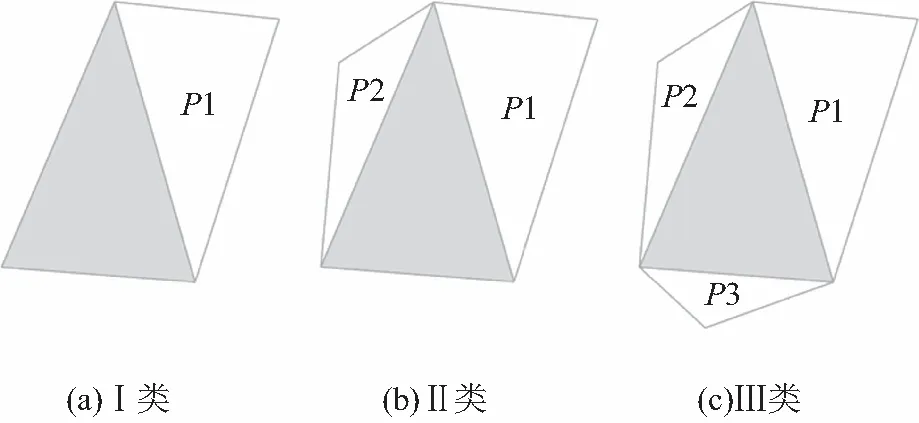
图4 三角元分类
(2)道路结构线的提取。三角形分类完毕后,将按照一定方法对上述的三类三角形进行连接。这里将两邻近三角形的公用边称为邻近边。如图5(a)所示,Ⅰ类三角形连接唯一邻近边的中点与其相对的顶点,Ⅱ类三角形连接两条邻近边的中点,Ⅲ类三角形连接重心与三边的中点。按照以上规则提取每个三角形区域的结构线并连接成网,最后得到图5(b)所示的街区内部道路结构。
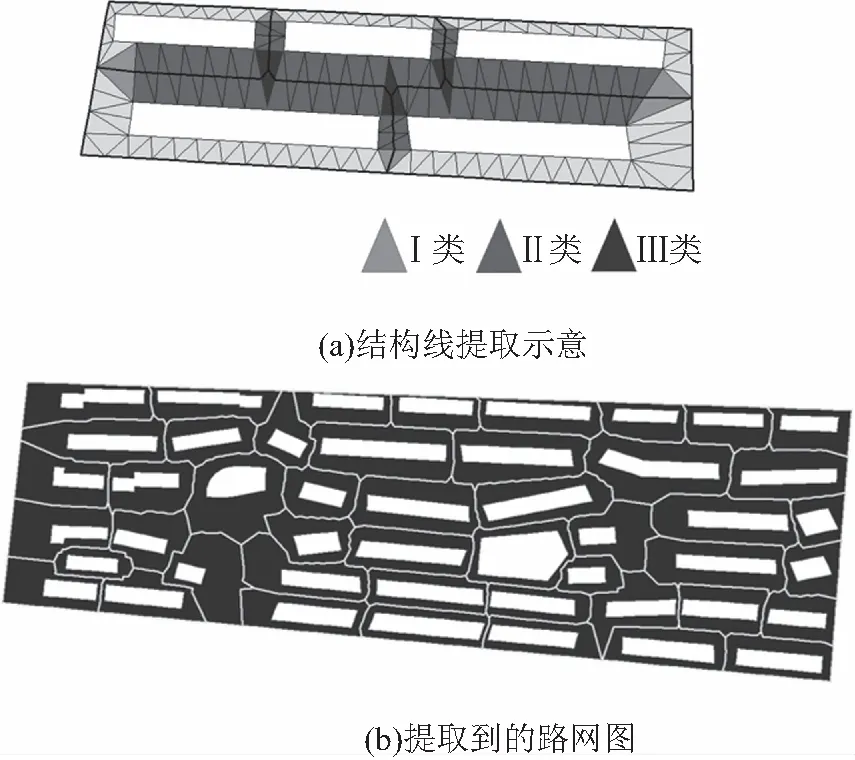
图5 道路几何结构的提取
1.3 道路数据的融合加工
1.3.1 路网优化
上一步骤提取得到的道路结构线还需要进行优化调整,主要包括结构线节点抽稀和交叉口优化处理两个方面:
(1)节点抽稀。由于在数据预处理阶段对原始街区多边形弧段数据进行了增密预处理,使得提取后道路网上存在大量多余节点,可能导致道路在几何形态上出现大量不规则抖动。道路要素上过于密集的矢量点并不会提升道路网的精度,反而会提高道路融合的复杂度与网络分析上的耗时。因此,需要利用道格拉斯-普克(Douglas-Peucker)算法和基于Delaunay三角网的包络区线化简算法[14]去除提取得到道路结构线上冗余的节点,在保留道路关键几何特征点的基础上降低矢量点密度。
(2)道路交叉口处理。经过骨架线提取算法得到的道路网还存在着在道路网汇集处出现不合理表达的问题。如图6所示,该类问题出现的原因是在街区路网交汇处出现的两个相对Ⅲ类三角形进行重心连接,使得连接处产生了两个“Y”型道路连接。针对该问题,本研究通过阈值搜索出这类路段并删除,再进行路段的直角化重构,将相对的Ⅲ类三角元边中点进行连接并打断,来构建正确的道路网络结构。
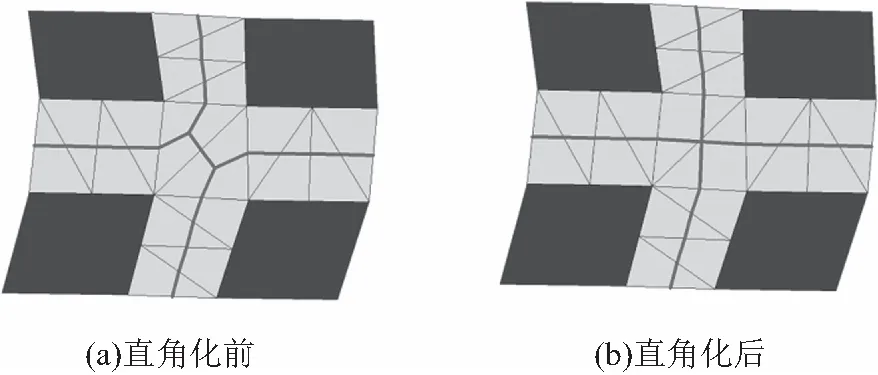
图6 道路交叉口直角化示意图
图7展示了优化调整前后的道路结构线。通过对比可以发现处理后的道路网消除了不规则的抖动,并优化了道路交叉口结构,使得提取出道路网具有更加正确的道路网络结构。
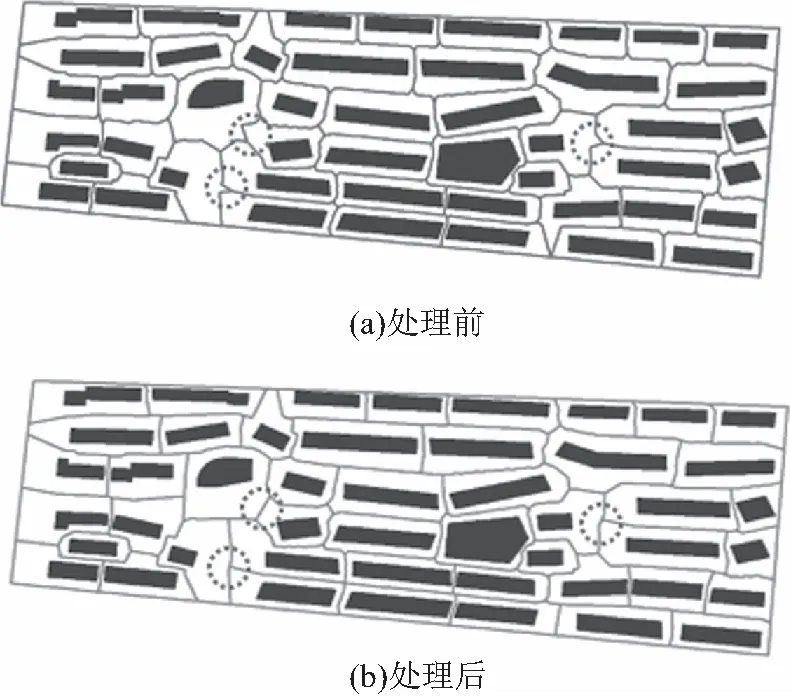
图7 处理前后道路网
1.3.2道路网的语义补全与融合
道路网的语义补全与融合是在社区内细粒度道路提取的过程中重要的环节,对路网进行语义信息的补全有利于扩宽道路网在导航中的应用领域,解决由于语义信息缺失而无法处理的导航问题。
不同粒度道路网融合的关键目的是将提取的社区内道路段与城市主干道路段进行匹配,并对匹配的道路段进行连接与融合,让细粒度道路网作为城市主干道路网的补充部分进行路网末梢的补全。道路网匹配时首先依据已补全的语义信息判断路段与外界的连通性,再对连通的路段以豪斯多夫(Hausdorff)距离作为指标进行连通主干道探测匹配[15],最后将匹配的路段进行连接,实现社区内外道路网的拓扑连通,融合后的道路网如图8所示。
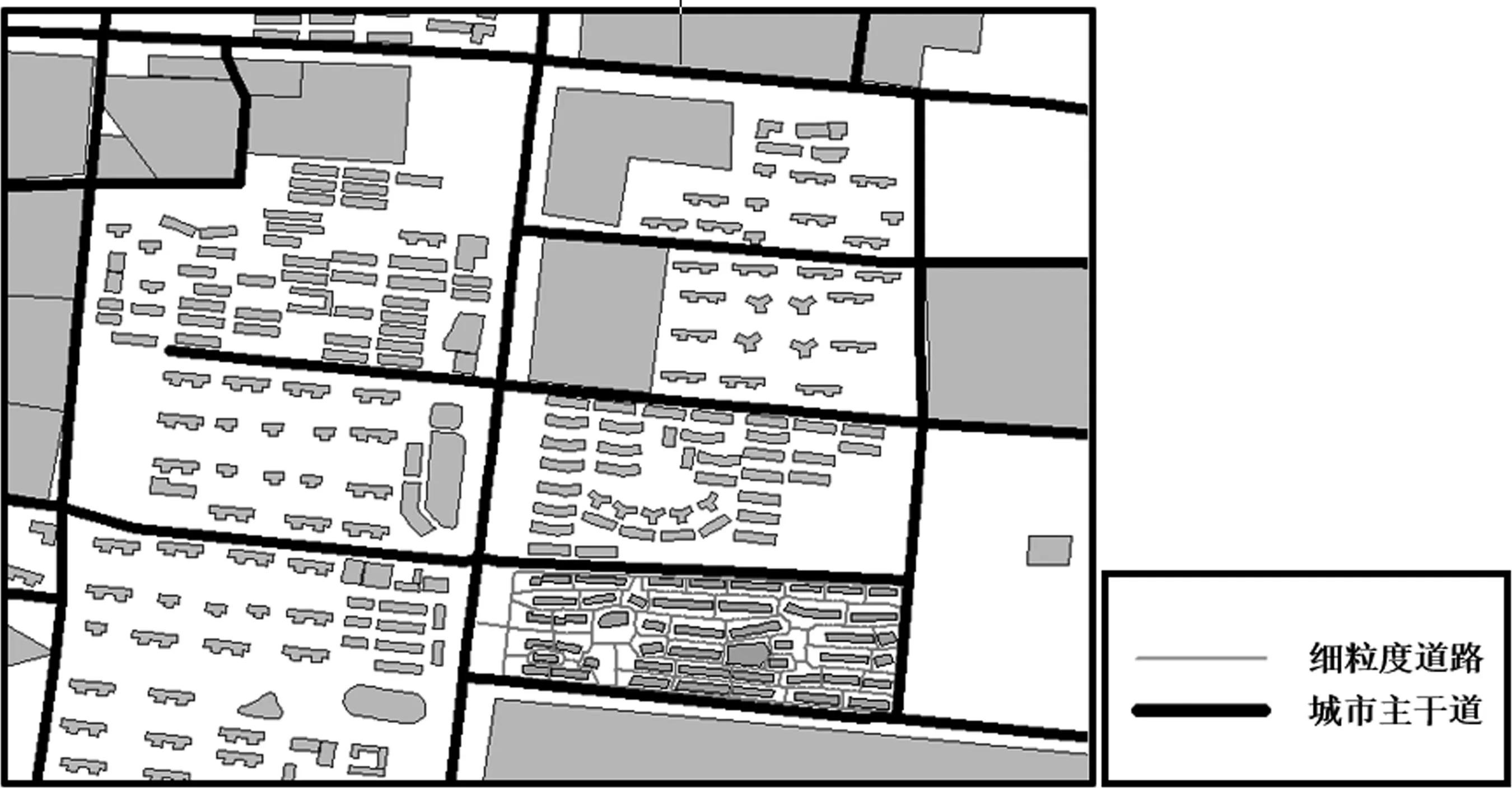
图8 不同粒度道路网的融合
2 实例分析
本实验采用了武汉市洪山区部分城市地物数据进行道路拓展的精细化导航实验。该区域包含817个建筑实体(包含学校、商圈、居民区等社区建筑)以及153 km城市主干道道路网数据。本实验采用约束Delaunay三角网方法来对该区域的精细粒度道路网进行提取,完善道路网的语义信息,并与城市主干道进行了融合建网。通过对加入细粒度道前后的路网在网约车上车点的选取差异来进行导航比对分析,根据社区内能否通行车辆两种场景对细粒度道路在城市导航上的应用开展进一步讨论。
(1)社区禁行车辆。当社区禁行车辆时,分析结果如图9所示,用户于位置A点呼叫网约车,司机处于位置E。由于社区内禁行车辆,司机无法驶入社区内接送用户,需从社区的外部选取一个上车点等待用户自行上车。仅依据城市主干道路网进行网络分析时,由于社区内路网缺失,导致在道路网末梢段仅能依照欧式距离作为权重来进行导航分析,无法得到最优的结果。如图9(a)所示,仅依据城市主干道进行导航分析,最终选择的上车点为位置D,而对照实验中加入细粒度道路网后的分析结果则如图9(b)所示,选择的上车点为位置B′。仅从欧氏距离上来看将位置D作为上车点相较位置B′离用户位置更近,但考虑到网络距离时,若以D点作为上车点,用户需要行走的路线为A-B-C-D,而以B′点作为上车点时,用户行进的路线会缩短为A′-B′。可以看出依据融合后的路网进行分析得出的上车点明显缩短了用户的步行距离。

(a)加入路网前
以图9为数据例,对加入细粒度道路网前后导航结果进行耗时分析,融合后路网所选择的上车点在用时方面相较于融合前相比,在用户步行耗时上降低了45.9%,总用时降低了33.9%。
(2)社区可通行车辆。当社区内道路允许司机直接驶入时,社区内精细粒度道路的补全在会进一步优化用户的出行体验。在图9(b)中,司机可以驾车依照路线E′-B′-A′直接行驶至用户建筑物门栋入口进行直接接送,用户花费在步行上的时间接近于零。若仅使用城市主干道路网数据进行导航分析时,由于社区内路网数据的缺失,司机无法直接接送用户,仍选择图9(a)中的位置D作为上车点,用户需要花费大量时间前往上车点D,极大地降低了的用户的出行体验与服务效率。
通过实验对比可以得出,在进行城市内精细化导航时,如果不对道路网末梢进行补全,当导航区域涉及社区内部时,导航结果会由于数据盲区的存在而出现错误或偏差,影响整体导航服务效率。补全后道路网能提供更高精度的道路数据和拓扑关系,面对社区内部道路不同行车状态的场景下开展导航分析时,均能明显降低用户取件、上车时间,避免错误导航结果影响用户体验,提高导航质量。
3 结束语
本文利用街区建筑物数据进行城市细粒度道路网提取,结合了道路语义信息进行路段区分与融合,进而实现城市道路网末梢补全。将本文方法应用于精细化导航,实验表明能够有效提高导航的准确性与效率,为城市化发展中“最后一公里”导航盲区问题的解决提供支撑。当前的研究仅着眼于社区内路网补全,以城市网约车上车点选取作为实验分析,今后可以从高精地图在室内高效位置服务、智能网联汽车、智慧交通等领域的构建、可视化与应用进行进一步的研究,如对高精地图在自动驾驶过程中辅助环境感知,进行目标检测,实现决策规划进行研究。
猜你喜欢
红外技术(2022年11期)2022-11-25
高技术通讯(2021年1期)2021-03-29
电脑与电信(2018年11期)2018-02-16
智能计算机与应用(2017年2期)2017-05-04
信息安全研究(2016年3期)2016-12-01
中国工程咨询(2015年5期)2015-02-16
影像技术(2015年4期)2015-02-11
长江工程职业技术学院学报(2014年4期)2014-11-30
中国工程咨询(2013年4期)2013-02-13
同济大学学报(自然科学版)(2012年1期)2012-12-03
