
某型声学多普勒流速剖面仪训练装置的设计与实现
2023-04-06 05:20田华李保平傅吉尧
电脑知识与技术 2023年5期
田华 李保平 傅吉尧
关键词:ADCP;模拟器;模拟训练装置;设计
声学多普勒流剖面仪(Acoustic Doppler CurrentProfiler,简称ADCP) 可以测量多维方向,多层剖面的流速和流向,是目前广泛使用的海洋调查设备,综合运用了多种高新技术,设备精密、价格昂贵、训练环境要求高,训练及维修成本高,实装教学对设备损耗大,尤其是训练科目设置和特情处置训练难度很大。而模拟训练装置可大大降低对实装的损耗,并可缓解培训人数多与教学设备少之间的矛盾,摆脱对海洋训练环境的依赖,是改变教学方式、改善训练环境、提高教学效果和训练效率的有效工具[1-2],目前广泛运用于装备的教学训练中。然而采用虚实结合技术,针对声学多普勒流剖面仪模拟训练装置的设计开发研究还不多。
1 设计思路
该训练装置针对实际工作中的典型应用场景开发,主要完成仪器投放前的检查校准操作、投放前设置、仪器投放和数据处理等训练。为达到逼真训练效果,采用半实物仿真技术,使用3D激光扫描建模技术、结合CNC加工和数字化装配技术,对ADCP模型壳体进行制作。ADCP模拟器的设备电路与上位机软件系统数据通信采用了与实装仪器相同的RS-232串口通信方式,并使用嵌入式控制系统技术引入单片机中,防止模拟器在使用时出现不同类型的错误。为实现调查任务的模拟训练,通过调用电子海图的各类物标信息进行海图显示,在电子海图显示的基础上实现电子海图的图层选择、缩放、漫游等辅助功能。采用Unity3D完成对船体及甲板设备的虚拟仿真,实现投放过程的模拟训练[3]。
2 功能指标与体系结构
2.1 ADCP 模拟训练子系统功能
ADCP 模拟训练子系统功分为ADCP 模拟器和WinSc模拟软件,该部分可以实现对仪器和软件的操作,能够模拟ADCP软件的投放前设置、投放前检测、时间设置、数据回放等功能。特别是在进行罗盘检测时,需要转动模拟器,而软件能够采集到模拟器转动产生的信号;在进行投放前检测时,需要擦拭模拟器上的声学换能器,软件能够采集到擦拭换能器产生的信号。ADCP模拟训练子系统功具有示教功能,学员在训练时遇到不会的地方可使用系统内的示教功能,通过学习模拟训练系统内的多媒体资料,掌握相关的操作使用技能。同时,系统还具有考核功能。在考核时,模拟训练系统内部的考核模块将调用题库里的预定方案,学员根据给定的方案对仪器进行逐步操作,考核软件根据学员操作情况进行打分,现场给出评判成绩[4]。
2.2 海洋调查吊放平台模拟训练子系统功能
海洋调查吊放平台可模拟海洋调查的工作环境,真实逼真的海洋调查工作环境可以给学员更加直观的印象,可提升学员的学习积极性,也使日常的教学训练更加贴近实际。同时,海洋调查吊放平台模拟训练子系统还可以模拟海洋调查仪器的吊放平台,学员可结合系统的虚拟操作,了解到一次海洋调查仪器的完整使用过程。
2.3 海洋调查工作流程模拟训练子系统功能
海洋调查工作流程模拟训练子系统可实现海洋调查计划航线、观测站点的设定,在操作时,学员输入相关参数后,系统可生成一份完整海洋调查作业实施方案。该功能的实现,可以使学员从调查方案的制定到任务的执行,实际参与一次完整海洋调查活动的组织和实施过程,提升了学员的学习效果。
3 关键技术与实现途径
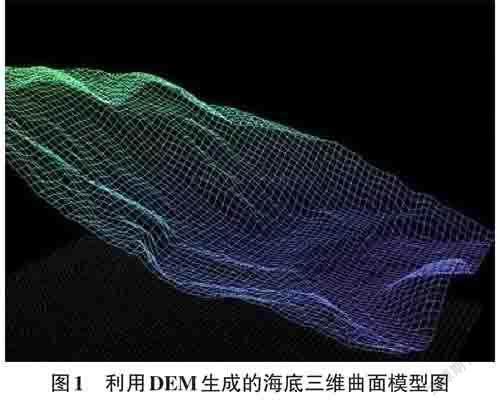
在海洋调查计划航线制定与航行模拟,以及仪器操作的模拟训练考核中都将需要用到海区任意位置的水深数据,而电子海图提供的水深数据为离散的水深测量点数据,如何将离散的水深数据生成平滑的连续数据,以及实现二维电子海图与三维视景同步是训练装置功能实现的关键。该项目采用了数字高程模型(DEM) 的方法,对电子海图中离散的水深测量点数据进行曲面拟合,生成调查训練海区全区域海底三维曲面模型(如图1) ,从而可以轻松得到任意位置点的水深数据。
3.1 地形三维数据的数据结构
根据数据处理的方法,地形数据应包含高度的三维数据点集合,其数据结构为:DEMPoint{X,Y,h},其中X、Y分别表示相对海区基准点的经差和纬差,h表示距海面的高度。
通常按栅格方法选取点,栅格选取的间隔,决定了曲面生成的质量,同时受计算机的处理速度限制。为了能产生较高质量仿真,间隔通常选为0.1链。一平方海里的区域,应由6000×6000=36000000个点的三维数据组成。如果用人工的方法根据海图去量化,其工作量是无法想象的。即使可以进行,其精度也是难以保证的。
数字海图,也称矢量海图(Vector Chart Format,以下简称VCF) ,是一种存储海图地理要素位置坐标和属性信息、简单无拓扑关系的地理数据模型。目前广泛使用的是由海军航保局研制的数字海图,其数据结构简洁,占用磁盘空间较小,支持属性操作,并允许用户建立空间索引及专题索引等,其内核是shapefile数据格式。VCF表示的要素内容有点状要素、线状要素、面状要素、区域要素。而在VCF中,要素管理采用物理图层的形式,每一图层记录一种要素,由相应的图形文件、索引文件、属性文件等文件进行描述。同一图层的三种文件名相同,即为层名,文件类型由文件后缀名来区分,其中图形文件为.Shp格式文件,索引文件为.shx格式文件,属性文件为.dbf格式文件。而同一图层中的点(Point) 、线(Line) 、面(Area) 要素层由层名加上几何要素类型标识符(P、L、A) 构成;区域要素文件的名称由层名加上“-n”构成,其中n为区域的序号。
图形文件(.shp文件)由文件头记录、记录头1、记录内容1……记录头n、记录内容n组成。其中文件头记录长度为100字节,记录了文件长度、图形类型、图形坐标的实际范围;每一个记录头存储记录号和内容长度;每一个记录内容包括图形几何类型和紧随其后的图形几何数据两部分,几何类型为点、线、多边形,几何数据采用平面直角坐标系,记录要素的定位点。
索引文件(.shx文件)由文件头记录、记录1……记录n组成。其中文件头记录长度也为100字节,与图形文件的文件头记录组织结构一样;每一个记录为8 字节固定长度,存储了图形文件中记录的偏移量与内容长度。
属性文件(.dbf文件)包括所描述要素的属性,是标准的dBASE文件,可以被基于Windows和DOS的许多表格应用程序使用。每一个图形数据记录都有一个相应的属性数据记录,在属性文件中记录的顺序与图形文件中记录的顺序一致。
3.2 电子海图水深数据计算
利用DEM生成海底三维数据的原理,就是根据目前正在迅速发展的数字海图提供的离散水深测量点数据,通过数字高程模型DEM对这些数据进行二次曲面拟合,得到地形的区域高程曲面方程,然后按量化精度要求,计算曲面中任意水平坐标点所对应的高程数据值,即该位置的水深值[5-6]。
例如:需要計算电子海图上某一个水平坐标点P(x,y) 的水深值,可在P点附近提取电子海图提供的m个已知水深测量点Pi(xi, yi) 的水深值zi,可通过以下公式进行拟合计算P(x,y) 的水深值z:
m为电子海图中调取的已知水深测量点的数量,m取值数的多少会影响到拟合计算精度和拟合计算速度,当m越大,拟合计算的精度就越高,但拟合计算的速度将越慢(计算时间越长),当m越小,拟合计算的速度将越快(计算时间越短),但拟合计算的精度就越低,通过反复试验,该项目根据电子海图可提取已知水深测量点数量m取15~20之间,既可满足计算机的瞬间计算,又可保证拟合计算精度(误差小于5%) 。
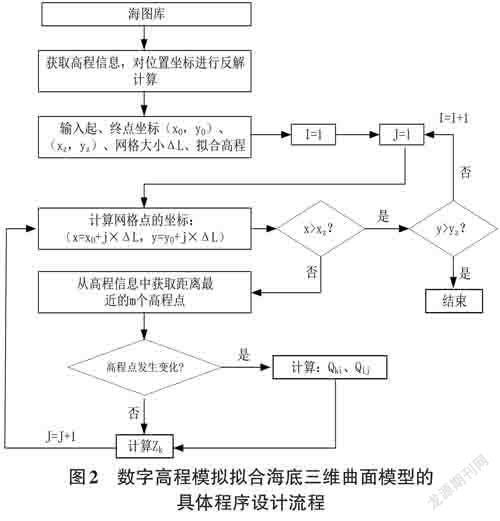
数字高程模拟拟合海底三维曲面模型的具体程序设计流程如图2。
3.3 二维电子海图与三维视景同步
该项目的海洋调查计划航线制定及熟悉调查海区虚拟现实训练软件系统中采用了二维海图数据与三维视景同步技术,实现电子海图平面坐标图形与虚拟现实三维视景坐标图像实时保持一致性。
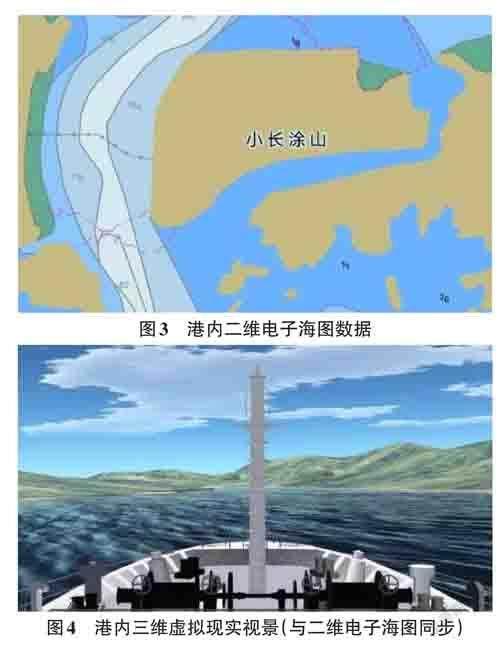
该软件系统采用与二维电子海图数据同步的三维方向性视景模型的方法,根据用户设置的出发地点和目的地点,使用二维电子海图数据库规划二维导航路径,同时根据三维诱导线及匹配关系数据库,建立相应的三维诱导路径,根据二维导航路径上的当前位置、二维导航路径与三维诱导路径的匹配关系,定位计算三维诱导路径上的对应位置,从而加载三维诱导线的可视物体集,渲染三维场景,并在软件系统中进行二维导航与三维导航同步推进。可以使用户能更轻松、直观、准确地辨认和熟悉海洋调查海区的环境,获得更为逼真、轻松的三维视景体验。图3为本系统港内二维电子海图数据,图4为该系统与二维电子海图数据同步的三维视景。
4 结束语
该型声学多普勒流速剖面仪训练装置设计新颖,采用了多种先进技术,实现了不依赖海洋训练环境条件下完成ADCP的投放全过程训练,通过虚实结合的方式,重点实现了对电子海图提供的离散水深测量点数据的二次曲面拟合,得到海底高程曲面方程,生成海底三维地形,采用了二维海图数据与三维视景同步技术,实现电子海图平面坐标图形与虚拟现实三维视景坐标图像实时保持一致性。模拟了传感器检查、罗盘校准等操作,极大提高了操作体验感,具备训练科目设置和考核,满足教学训练结构所需,对延长仪器寿命、提高操作技能具有重要的意义。
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
小哥白尼(神奇星球)(2021年11期)2021-03-08
现代装饰(2020年7期)2020-07-27
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
电子设计工程(2014年18期)2014-02-27
舒适广告(2008年9期)2008-09-22
