TS15测量机器人在地铁基坑水平位移监测中的应用
2023-04-23 05:53蔡少辉唐强张映宁
科技资讯 2023年6期
蔡少辉 唐强 张映宁
摘要:着重介绍测量机器人自由设站测量技术的基本原理及作业流程,并将此技术方法应用于地铁基坑桩顶水平位移的监测中。通过实践表明,该技术方法具有监测精度高、操作灵活、受场地影响小、工作效率高等优点,不仅在基坑水平位移监测中能够快速获得监测点高精度的坐标值,也可以应用到外形复杂的建、构筑物、人无法触及或无法到达区域的三维变形监测当中。
关键词:测量机器人自由设站地铁基坑桩顶水平位移
中图分类号:U231文献标识码:A
Application of TS15 Measuring Robots in Horizontal Displacement Monitoring of Subway Foundation Pits
CAI Shaohui TANG Qiang ZHANG Yingning
(Geologic Party No. 216, CNNC,Urumqi, Xinjiang Uygur Autonomous Region,830011 China)
Abstract:This paper focuses on the introduction of the basic principle and working process of the free stationmeasurement technology of measuring robots, and applies this technology to the monitoring of horizontal displacement of the pile top of the subway foundation pit. The practice shows that this technology has advantages of high monitoring accuracy, flexible operation, little influence from the site and high work efficiency, which can not only quickly obtain the high-precision coordinate values of monitoring points in the horizontal displacement monitoring of foundation pits, but also be applied to the three-dimensional deformation monitoring of complex buildings, structures and areas that are inaccessible or unreachable to human beings.
Key Words:Measuring robot; Free station; Metro foundation pit; Horizontal displacement of pile top
随着我国城市化进程的快速发展,城市人口迅猛增加,地面通行压力也是越来越大,出行及交通问题也得到越来越多人们的关注和重视。为了应对这种局面,发展城市轨道交通将会是最有效的方式之一,为了缓解城市地面交通的压力,建设地铁可以是最有效的主要措施之一。除了北上广等一线大型城市新增地铁线路外,好多中型城市也进行了地铁的建设。地铁交通线路由车站、车站与车站之间区间组成,车站有明挖车站、盖挖车站和暗挖车站,区间有明挖法、暗挖法或盾构等施工方法。明挖法作为地铁车站或明挖区间的主要施工技术,在地铁施工工程中运用此种施工技术方法,既能加快地铁路线的建设速度,又能提高地铁建设的质量,也可以减少开挖施工的安全风险,促進城市轨道交通的安全健康发展。
近年来深基坑工程施工中基坑失稳事故时有发生,为减少事故的发生对深基坑工程的技术提出了新的要求[1]。全站仪自由设站法以其灵活、机动、能适应城市地铁基坑施工周边的复杂环境等特点,已被广泛应用到测量行业的各种工程中[2],随着测量机器人的出现,应用更为广泛。测量机器人自由设站方法,可以避免基坑施工干扰及周边环境的影响,方便快速获得监测点的坐标。内业通过相邻周期坐标计算比较,可以获取监测点的位移变速率和累计位移量[3]。随着测量仪器的更新换代,智能型测量全站仪—测量机器人的出现,使基坑桩顶水平位移监测变得更灵活,而且精度也较高。由于场地区域材料堆载和机械对个别控制点的阻挡对全站仪监测精度的影响较大,因此要多布设后视控制点,以保证监测精度。基坑冠梁多位于挡土墙以下,水平监测点也往往布设于冠梁上,测量机器人一次架设仪器不能全部测完监测点,必须要有足够的强制观测墩供测量机器人架设仪器,也必须有足够的后视控制点供测量机器人定向使用。
该文主要介绍采用基于徕卡TS15测量机器人自由设站技术,在乌鲁木齐市轨道交通2号线一期工程及成都轨道交通第13号线第三方监测项目中,对明挖基坑桩顶水平位移监测的应用实践。通过对测量方法及数据的对比分析,得出了基于徕卡TS15测量机器人在明挖基坑水平位移监测的优势。该方法观测灵活,数据精度高,工作效率高,得到业主方的肯定,并在整个乌鲁木齐市轨道交通2号线一期工程及成都轨道交通第13号线施工监测中进行了推广于普及,取得了较好的效益。
1测量机器人后方交会的基本原理与作业流程
1.1测量机器人
测量机器人是一种能代替人而进行自动搜索、跟踪、辨识和精确照准目标并获取角度、距离等坐标等信息的智能型速测电子全站仪。测量机器人通过CCD影像传感器和其它传感器对现实测量世界中的目标进行识别,迅速做出分析、判断与推理,实现自我控制,并自动完成照准、读数等操作,完全可以代替人来完成许多测量任务[4],尤其是人无法到达或触及的目标与区域。
1.2测量机器人后方交会的基本原理
测量机器人系统是基于一台测量机器人与多个目标照准棱镜组成的变形监测系统,其实质主要是自由设站后方交会极坐标测量系统。
1.2.1 强制观测基站
强制观测基站是全站仪极坐标测量的起始点,设置强制观测装置可以减小测量机器人的对中误差,从而减小观测误差,提高观测精度。
1.2.2参照点
参照点为后视照准点,该点的平面坐标为已知,点位应布设于变形影响区域外的稳固地带,一般布设于变形影响区域外的楼房等高达建筑物上。参照点采用强制对中装置,安置棱镜,一般一个测量机器人应布设3~4个后视照准点,并要求相邻后视点方向夹角要大,且要覆盖整个变形监测区域。
1.2.3监测点
监测点是根据设计布设于变形体上,是能够反映变形特征部位的观测目标。
1.3测量机器人作业流程
测量机器人自由设站是采用后方交会的方法进行,在强制观测墩上架设测量机器人,首先观测已知后视点,从而得出仪器架设点的坐标值。然后采用多测回测角,对观测点依次观测目标点,结束后利用后处理软件进行平差计算,从而求得观测点的坐标值。
测量机器人作业流程主要包括工程项目管理、系统初始化、学习测量、自动观测、数据处理、数据查询、成果输出等功能[5]。
工程项目管理建立一个相对应的数据库文件,保存该变形监测项目的所有的监测数据,初始值数据、原始观测数据和计算分析成果等[6];测量机器人系统初始化后自动搜寻目标、测距、测角模式和单位等设置;通过人为操作全站仪,逐一照准目标点,训练获取目标点概略空间位置信息的过程进行学习测量;按照监测方案设计,利用预先设置的限差值来控制测量机器人,根据学习测量程序自动搜索监测点并做周期观测;对原始观测数据进行处理前的检查、距离进行投影计算、目标点坐标的平差计算以及对比上期的变形量进行对比分析;根据需要用报表、报告的形式输出选定周期和目标点的观测原始数据、平差计算报告和分析成果。
2 地铁明挖基坑水平位移第三方监测的工程实例
2.1工程概况
华山街站为乌鲁木齐市轨道交通2号线一期工程线路终点的最后一座车站,车站主体结构采用明挖法施工,出入口、风道采用暗挖法+明挖法施工,车站小里程端区间隧道采用暗挖法施工、车站大里程端区间隧道采用明挖法施工。
本车站总长286.26m,车站标准段宽度21.8m,南、北端车站高度分别为23.64m、21.1m。车站中心顶板覆土3.525m。车站范围内维泰北路地势南高北低,车站南北端地面高差约5.05m,围护结构基坑长度286.26m,基坑深度约24.6~28.6m。基坑采用φ1000@1500mm钻孔灌注桩+4道钢管内支撑支护。
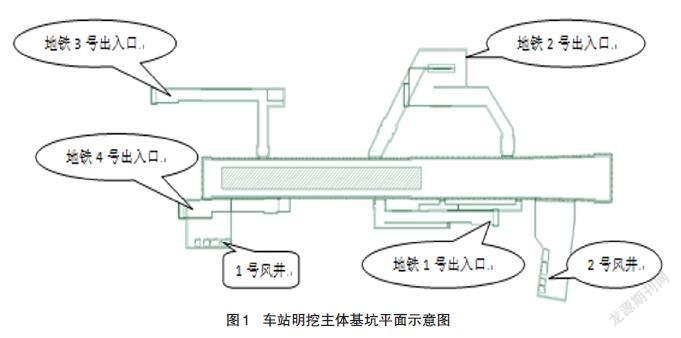
车站地下一层布置物业开发、地下二层为站厅层,地下三层为站台层,共设四个出入口,设置两组风亭。1号出入口位于车站东北侧,2号出入口位于车站西北侧,新疆一龙印刷门前,3号出入口位于车站西南侧,东工汽车维修服务中心前,均采用Φ800@1400mm钻孔灌注桩+钢管内支撑支护,局部暗挖。车站两端分别设置一组风亭,采用800@1400mm钻孔灌注桩+钢管内支撑支护。车站明挖主体基坑示意图见图1。
2.2基坑水平位移工作基点及监测点的布设
2.2.1 水平位移工作基点的布设
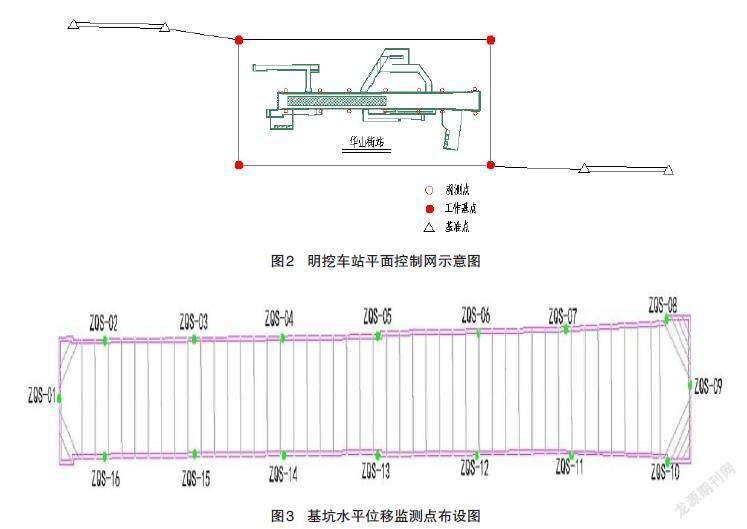
为了保证监测精度,根据工程特点监测作业过程至少需要联测3~4工作基点,为确保工作基点的稳定性,点位应布设于施工基坑开挖深度2倍距离之外的稳定区域。为减少对中误差的影响,从而提高监测精度,工作基点应埋设强制对中观测墩或强制对中标志。本车站工作基准点以乌鲁木齐市轨道交通2号线施工平面控制網起算点为起算基准,采用全站仪附合导线形式,进行工作基准网的布设。本明车站平面控制网见图2。
2.2.2 基坑监测点的布设
基准点应布设在变形体之外,监测点布设在变形体上[7]。明挖基坑桩顶水平位移测点布设在基坑各边冠梁上,本车站在基坑的长边按间距20布设桩顶水平位移测点,短边中间位置各布置1个测点,在基坑阳角及基坑的关键部位加密布设监测点,本车站基坑共布设30个水平位移监测点。为减少监测点的对中误差,监测点布设采用强制对中的方式,在冠梁上布设固定的小棱镜。
2.2.3 测量机器人强制观测墩的布设
测量机器人强制观测墩根据工程的特点,沿基坑周边布设,数量不少于2个,本车站比较长,所以在基坑四周制作了4个强制观测墩,确保能观测全部的水平位移监测点。车站明挖基坑水平位移监测点布设如图3所示。
2.3监测的作业方法
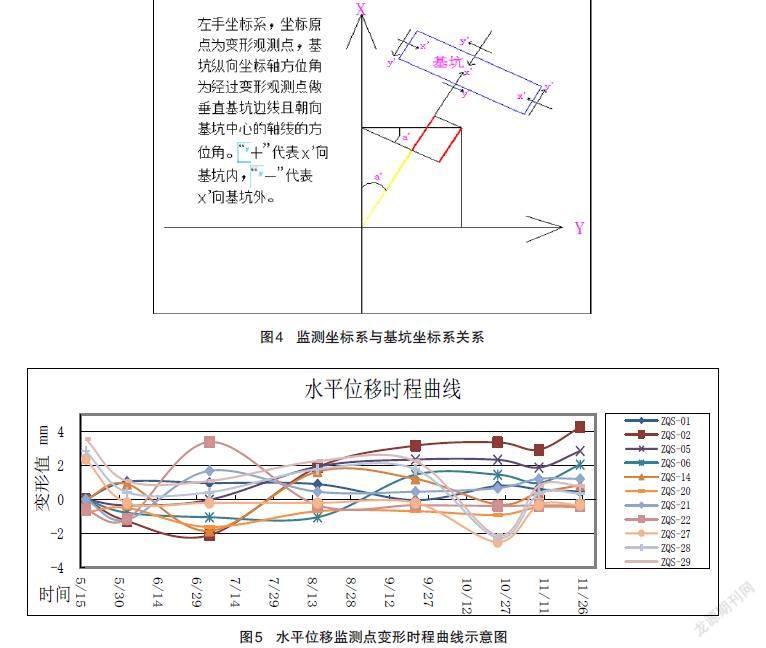
工作基点及水平位移观测点棱镜全部固定后,进行监测点观测。将徕卡TS15测量机器人架设在制作好的强制观测墩上,精确整平,然后进行一系列工程设置。选择合适于本测站的定向点、监测点,测量机器人进行学习后,自动照准并测量方位角、距离。观测标志均采用小棱镜观测标志,并统一编号。观测结束后,导出观测数据,通过清华山维软件进行平差计算,计算出各观测点坐标值。通过将变形观测点的坐标值,投影计算至垂直于基坑方向的矢量位移,根据相邻周期计算各期累计变形量和变形速率等数据,从而判断基坑的稳定性,指导地铁安全施工。监测点坐标系与基坑坐标系关系见图4。采用Excel列表计算各监测点的阶段累计变形值、阶段变形速率。监测点变形曲线示意图见图5。
2.4为提高测量机器人监测精度而采取的必要措施
(1) 水平位移测量的精度跟许多因素有关,如仪器测角、测边精度、外界条件的影响以及观测员的操作等,可以通过选用相应精度的仪器,并进行仪器、人员及观测顺序“3固定”的措施,来保证测量精度。
(2) 采用强制观测墩,工作基点及监测点均采用强制对中装置,消除了对中误差的影响,提高观测精度。
(3) 每次观测不少于3个定向参考点,便于测量数据的检核与平差,以保证相对定向的精度。
3监测成果分析
3.1 基坑桩顶水平位移变形分析
基坑是否处于安全状态,所有可能发生的事都可以通过监测数据反映出来,这样才能对基坑接下来的发展趋势做一个合理的预判[8]。基坑在土方开挖前进行水平位移监测点的布设,待其稳定后进行监测点初始值的采集,根据监测计划的频次进行水平位移的监测。但出现监测异常及周边环境有重大变化时加强监测频次,车站封顶后停止监测。本次所布设的30个监测点中,在整个施工期间的监测过程中,监测值向基坑内偏移量最大累计值为5.3mm,小于累计位移控制指标30mm。本次基坑变形监测稳定的主要原因有以下几个方面。
(1) 基坑在进行开挖时,围护桩体的变形主要朝坑内发展[9]。在基坑开挖施工过程中,土体就会向基坑内倾斜,及时架设钢支撑,使基坑处于稳定状态。
(2) 基坑自身深度较浅,土质主要以砂砾岩为主,而且水位较深,地层也相对稳定。
(3) 减少基坑开挖期间周边堆载物及大型机械,减小对基坑稳定性的影响。
3.2 基坑桩顶水平位移变形规律分析
根据基坑特点及变形影响,选取基坑西侧影响较大区域的3个变形监测点,绘制监测点变化的时程曲线图,监测点时程曲线见图6。
对于选取的监测点受基坑开挖影响,变形值随时间变形规律如下。
工况①:基坑刚开始土方开挖,开挖表层至-2m,架設第一道钢支撑,此时监测值比较稳定,最大变形为1.2mm。
工况②:土方开挖至第二道钢支撑以下0.5m(约-8m),架设第二道钢支撑。在此段时间内测点变形速率有增大趋势,经分析基坑西侧为运输道路,渣土车辆及大型机械碾压造成西侧土体向基坑内偏移5.3mm,此时该变形点附近地表沉降点监测值变化不大,但该点旁边的桩体水平位移监测点变化较大,向基坑内偏移3.5mm。
工况③:第二道钢支撑架设完成后,调整预加轴力值,是基坑回弹至稳定状态。
工况④:土方开挖至第三道钢支撑以下0.5m(约-16m),该部位钢支撑架设滞后,使基坑北侧土体向基坑内偏移。
工况⑤:基坑开挖到底,进行底板施工,钢支撑增加了预加轴力,变形发生了一定量的回弹,最后趋于稳定。
4结论
(1) 在与常规测量方法相比较,测量机器人自由设站后方交会方法应用在基坑桩顶水平位移监测中,能够快速获得监测点较高精度的坐标,也可以应用到外形复杂的构、建筑物以及人无法触及或无法到达区域的三维变形监测当中;测量机器人强制观测墩、监测点采用强制对中的棱镜,避免仪器和目标点对中误差;使用带马达驱动的测量机器人施测,可进行多测回的自动照准测量,减少了人为观测的偶然误差,保证了监测精度。
(2) 明挖基坑在施工过程对桩顶水平位移的影响较大,基坑开挖越深,变形比较明显。在此期间如果有基坑周边有大型机械或者堆载物等荷载影响,就会使基坑的变形比较明显,随着这些荷载消除后,变形就会趋于稳定。因此在基坑开挖期间应减少基坑周边运输车辆、大型机械等设备在该部位移动、作业,从而确保基坑的稳定。
(3) 作为第三方监测单位,通过测量机器人自由设站技术在水平位移的监测实践,方法先进,监测数据准确,得到了建设单位的肯定,并在乌鲁木齐市轨道交通2号线一期工程全线推广应用。由建设单位组织,该单位对全线施工单位的施工监测人员进行现场培训,保证了监测数据的精准与可靠,为地铁明挖基坑的安全施工提供准确的数据指导,从而确保基坑的安全施工。
(4) 测量机器人自由设站技术在该单位参与实施的成都轨道交通第13号线一期工程B标段(车辆段~净居寺站)也得到了较好的应用,明挖车站的基坑桩顶水平位移全部使用这种方法进行监测。该方法不仅观测方便、工作效率高,而且减小了仪器和棱镜的对中误差,提高了监测精度,取得很好的经济效益。
参考文献
[1]袁劲楠.苏州轨道交通某深基坑支护变形控制技术及效果评价[D].苏州:苏州科技大学, 2020.
[2]李木子,李华.自由设站法在边坡变形监测中的应用研究[J].科学技术创新,2020(21):
133-134.
[3]高爱林,许文学,蔡军.全站仪自由设站法在地铁基坑水平位移监测中的应用[J].都市快轨交通,2013,26(5):93-96.
[4]马琳.乌鲁木齐市克南高架桥变形监测及其形变分析[D].乌鲁木齐:新疆大学,2015.
[5]梅文胜,张正禄,黄全义.测量机器人在变形监测中的应用研究[J].大坝与安全,2002(5):33-35.
[6]张爱国.地下立体交通工程桩-撑体系深基坑监测浅析[J].甘肃科技,2018,34(19):122-124.
[7]何勇.自由测站边角交会法在地铁基坑水平位移变形监测中的应用[J].运输经理世界,2022(13):1-3.
[8]孙晨.地铁车站深基坑变形监测与数值模拟研究[D].淮南:安徽理工大学,2020.
[9]刘正华.合肥某地铁深基坑变形控制研究[D].淮南:安徽理工大学,2021.
猜你喜欢
煤气与热力(2022年4期)2022-05-23
建材发展导向(2021年22期)2022-01-18
水利水电科技进展(2021年6期)2022-01-07
建材发展导向(2021年18期)2021-11-05
建材发展导向(2021年12期)2021-07-22
水电站设计(2020年4期)2020-07-16
建材发展导向(2019年3期)2019-08-06
小学生必读(低年级版)(2017年9期)2018-01-31
领导决策信息(2017年17期)2017-06-21
湖南畜牧兽医(2016年3期)2016-06-05