宽带雷达导引头半实物仿真目标模拟方法研究
2023-04-25 08:12肖本龙傅亦源牛凤梁
舰船电子对抗 2023年2期
肖本龙,傅亦源,李 超,牛凤梁
(电子信息系统复杂电磁环境效应国家重点实验室,河南 洛阳 471003)
0 引 言
随着电子技术的快速发展,雷达导引头面临的作战环境日趋复杂,传统的外场试验模式难以完全适应其试验需要。由于试验环境的可控性和可重复性更好,半实物仿真在雷达导引头试验领域得到了广泛应用,在工业部门较多应用于产品的研制改进,可为样机生产提供便利的试验条件,也可以用于性能鉴定试验,考核装备在复杂电磁环境下的技术性能[1]。
在射频仿真暗室中,通过天线阵列模拟雷达目标信号的空间运动特性,利用幅度重心原理,通过对三元组的幅度、相位进行控制实现目标位置的精确模拟。由于传统天线阵列馈电通道的幅相控制一般采用程控衰减器和移相器等射频器件实现,同时只能控制某一个频点的幅度和相位,幅相控制能够满足窄带信号的角模拟精度的需要,但难以准确模拟宽带目标信号的运动角位置信息[2-3]。本文主要针对宽带雷达导引头的半实物仿真试验需求,研究提高天线阵列宽带目标信号角模拟精度的方法。
1 宽带目标模拟精度影响因素分析
雷达导引头射频仿真试验目标模拟精度受多个方面因素的影响,如天线阵列通道幅相控制精度、微波暗室多路径传输、三轴模拟导弹转台误差、天线阵球心与被试装备电心不同心等。宽带目标信号的实现难度主要在于克服馈电通道带宽内的幅相差异引起的误差[4],因此,本文重点研究天线阵列通道宽带幅相控制特性对目标模拟精度的影响。
1.1 传统三元组控制方法的不足
在进行射频半实物仿真试验时,天线阵列馈电通道通过功分器将信号模拟器生成的雷达信号分为3路,根据目标位置计算所在天线阵列三元组,通过射频开关网络将3路信号切换至三元组顶点对应的辐射单元,并通过A、B、C支路上的衰减器和移相器分别控制三元组各辐射单元的幅度相位,实现目标在三元组内的任意位置移动,传统三元组天线馈电通道结构如图1所示。
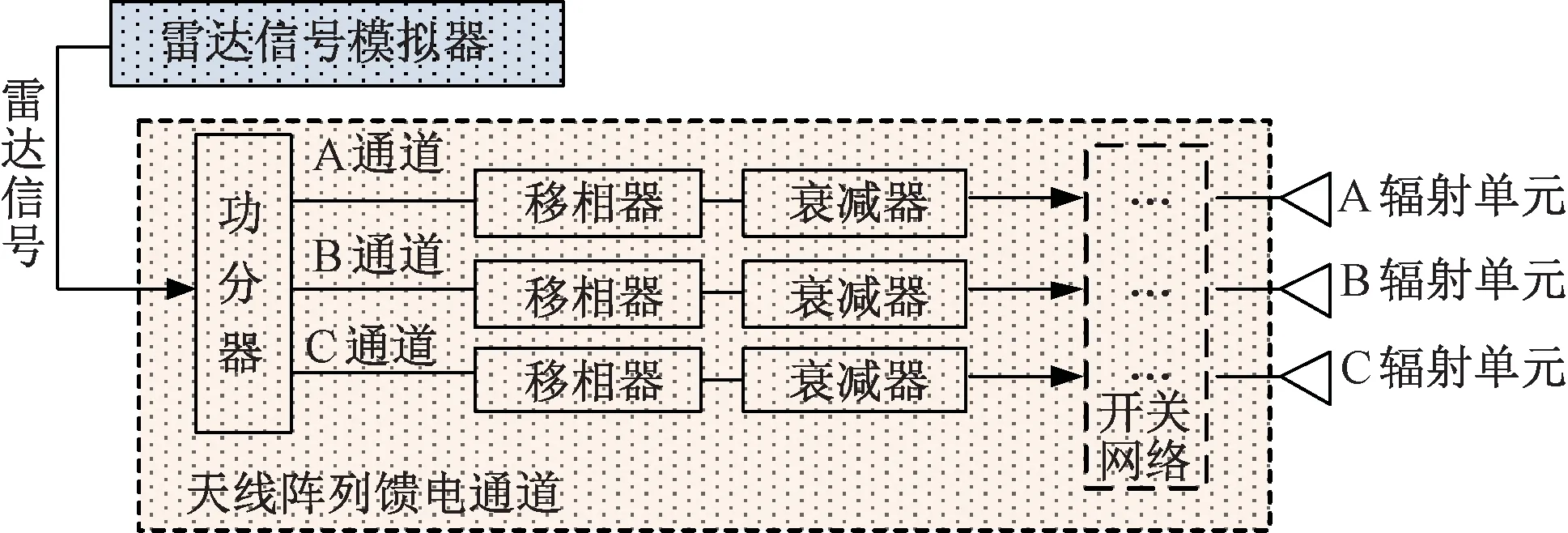
图1 传统三元组天线馈电通道结构示意图
传统的三元组控制方法首先对A、B、C 3个通道的各频点的初始相位和幅度进行测量,生成幅相校正表,用于将3个通道相位调整一致,并消除在各频点上的通道幅度不一致性[5]。在此基础上,根据位置控制需要对幅相进行迭代控制。这个方法是通过对通道某一个频点的幅相特性进行控制实现的,对于宽带信号的位置控制精度仅能依靠通道在带宽内固有的幅相一致性来保证,对器件的性能要求较高。馈电通道一般由移相器、衰减器、电子开关、功率放大器等多个器件组成,由于各器件之间的性能差异,导致A、B、C 3个通道之间的幅度、相位一致性难以控制到理想水平。图2为典型移相器6~18 GHz频段内的插损一致性,可以看出,其不同个例之间的插损特性存在明显不一致。
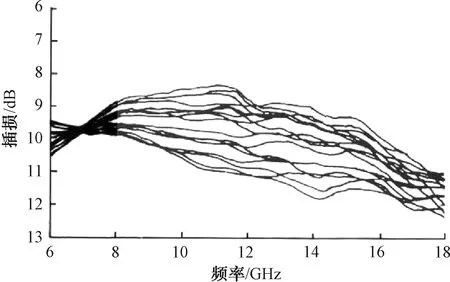
图2 典型移相器6~18 GHz频段内的插损一致性
1.2 幅相控制精度对目标位置误差的影响
如图3所示,建立坐标系,将坐标原点O(0,0,0)放在球面天线阵列球心,x轴水平指向天线阵列的中心,y轴垂直向上,z轴按右手直角坐标系确定。假设三元组3个辐射单元的位置分别为:A(R,θ1,φ1),B(R,θ2,φ2),C(R,θ3,φ3),要求的视在辐射中心为O′(R,θ,φ),其中,R为阵面辐射单元到原点的距离,θ为俯仰角,φ为方位角,E1、E2、E3分别为三元组的3个天线辐射信号的振幅。R为阵面上三元组天线口径面到转台回转中心(即坐标原点)的距离[6]。
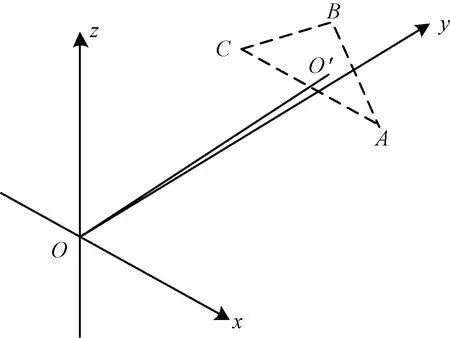
图3 三元组坐标关系图
根据波因廷矢量法推导,得到近似的重心公式,并可求得三元组合成场的辐射中心解[7-8]:
(1)
(2)
根据三元组合成原理,可分析得到通道幅度控制误差和相位控制误差对目标位置模拟精度的影响,如图4和图5所示。从图4和图5中可以看出,随着幅度和相位控制误差增大,目标位置精度误差也随之增大。相比较而言,幅度误差对目标位置精度具有较大的影响,相位误差对目标位置精度的影响较小。因此工程上通常尽量减小幅度误差而允许存在一定的相位误差。
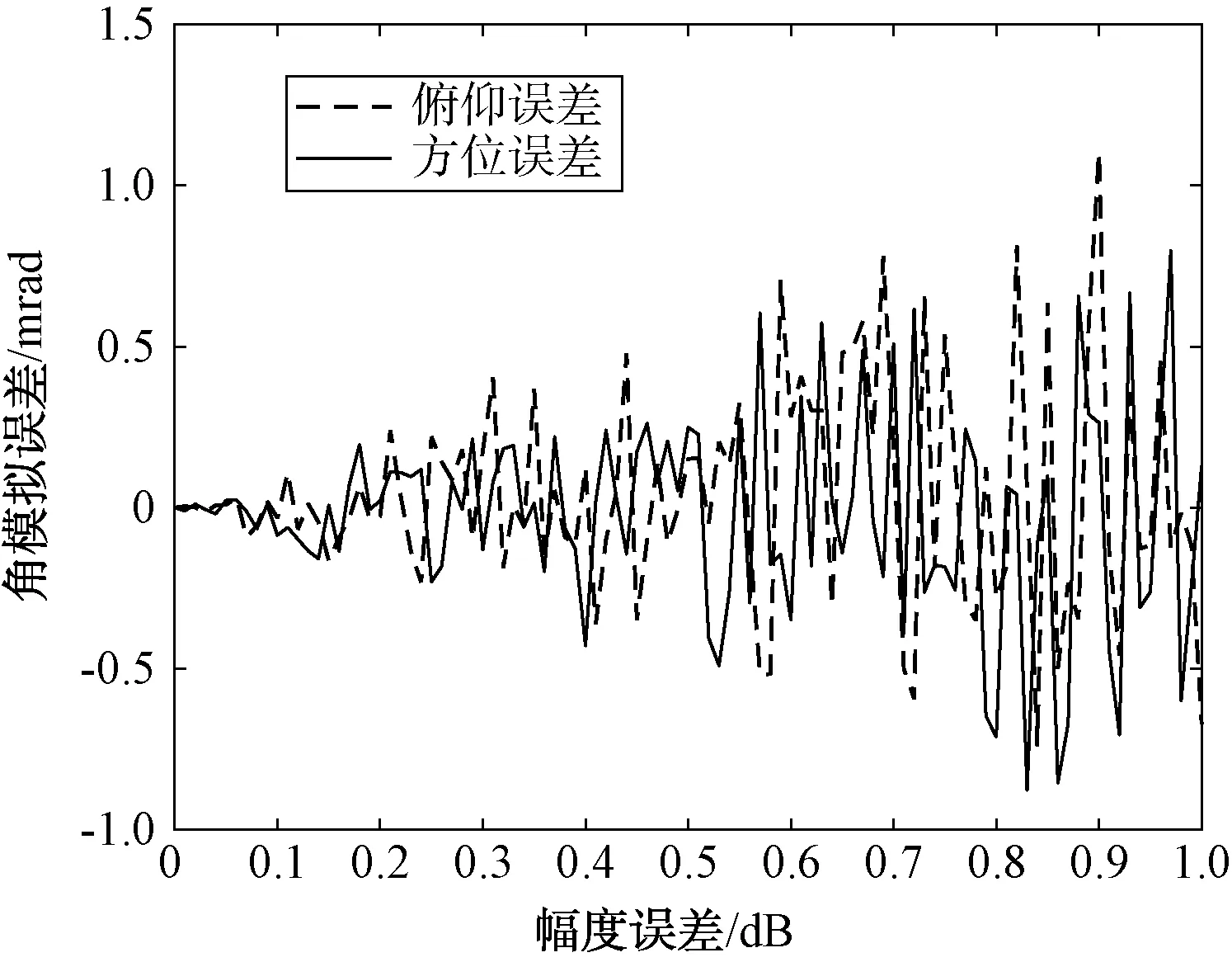
图4 目标位置误差与幅度控制误差关系图
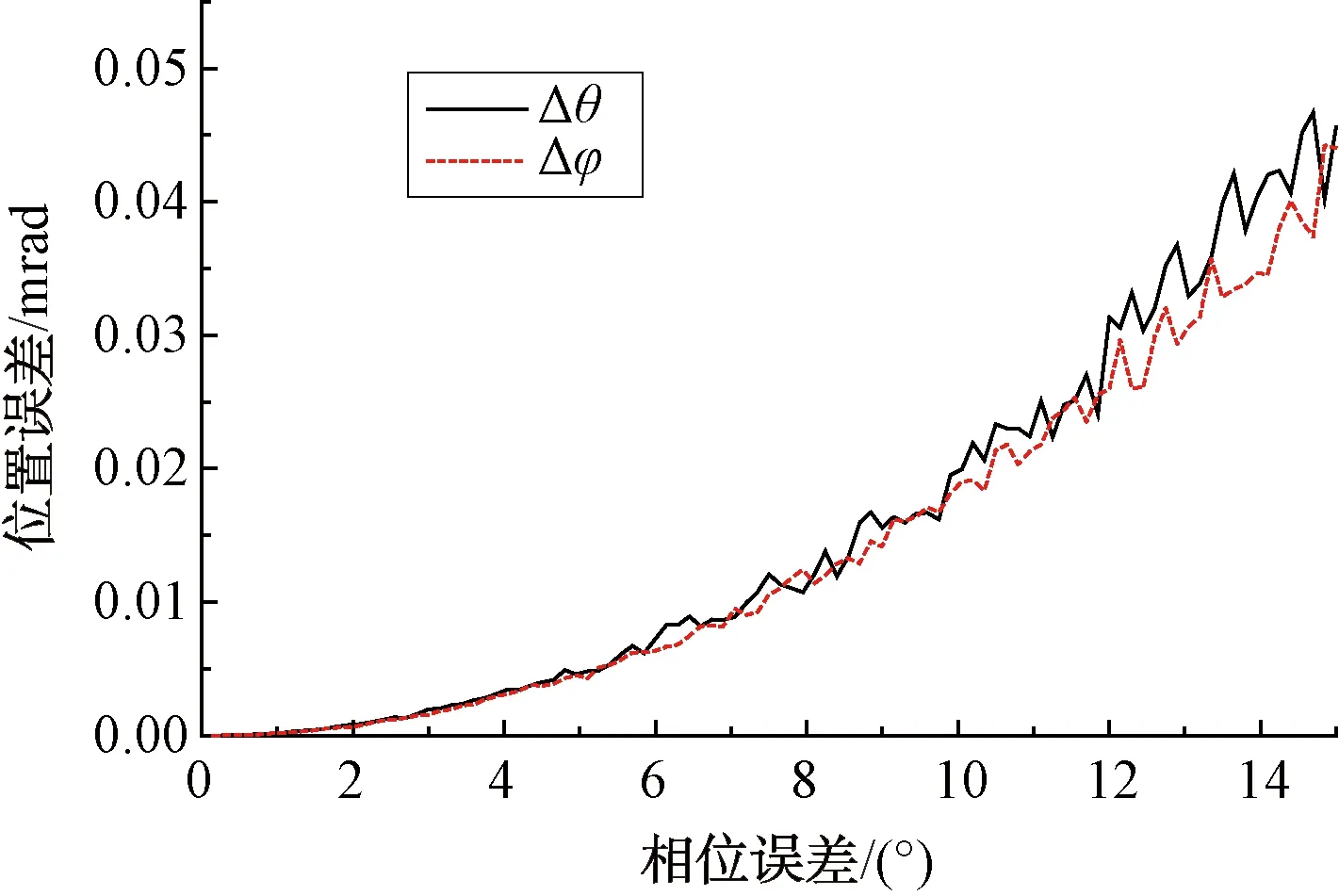
图5 目标位置误差与相位控制误差关系图
2 实验测试分析
为了进一步研究三元组馈电通道的幅相一致性,按照图1的典型馈电链路结构搭建实验链路开展测试分析,实际场景如图6所示。测试时,在10.5 GHz频点处控制三元组的幅相平衡值,以三元组其中一个辐射单元为参考基准,利用型号为Angilent N9918A的矢量网络分析仪对三元组之间的幅相不一致性进行测试,扫描频段为6~18 GHz,测试结果如图7和图8所示。从图中可以看出,以中心频率10.5 GHz、带宽1 GHz为例,其幅度不一致性最大值为0.9 dB,相位不一致性为8.4°,按照幅相控制误差对目标位置精度的影响分析,幅度不一致性引起的目标位置误差约为0.8 mrad,相位一致性引起的目标位置误差约为0.01 mrad,幅度较相位影响大,与理论分析一致,且带宽内目标位置误差起伏较大。

图6 目标位置误差与相位控制误差关系图
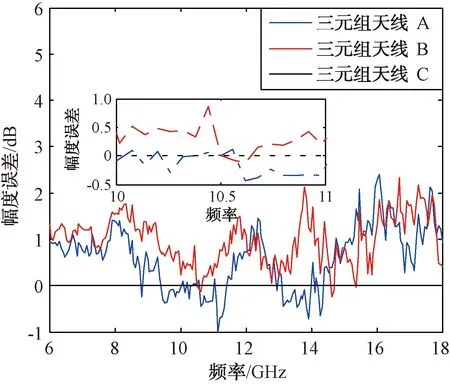
图7 10.5 GHz条件下6~18 GHz幅度不一致性
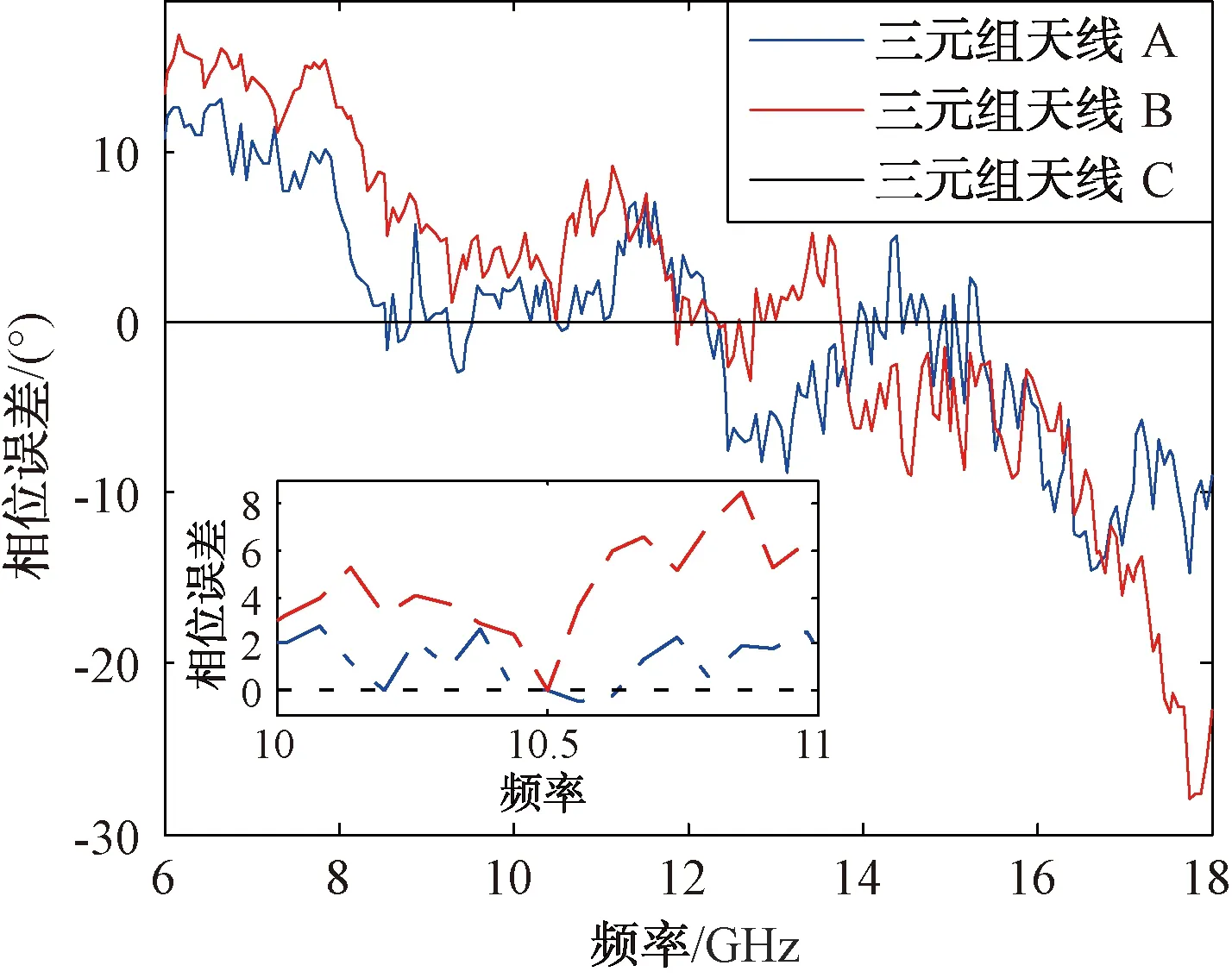
图8 10.5 GHz条件下6~18 GHz相位不一致性
3 数字基带预失真技术
3.1 数字基带预失真技术原理
基于现场可编程门阵列(FPGA)的信号模拟器可通过在数字域产生基带信号,再通过数/模转换器(DAC)生成模拟信号。为了克服移相器、衰减器只能对点频信号进行控制的局限,采用数字基带预调制方法,将馈电通道的幅相控制从依赖射频器件的局限中剥离出来,根据事先标校的通道幅相特性,在信号模拟器的数字基带以相逆的方向对信号进行预失真调制,以抵消通道间的幅相差异,提高通道幅相一致性。馈电通道的结构由图1改进为图9,即将由衰减器和移相器控制三元组A、B、C 3个通道的幅相调制任务,调整至直接由信号模拟器在数字基带实现,以达到在宽带范围内对信号进行幅相调制的目的。
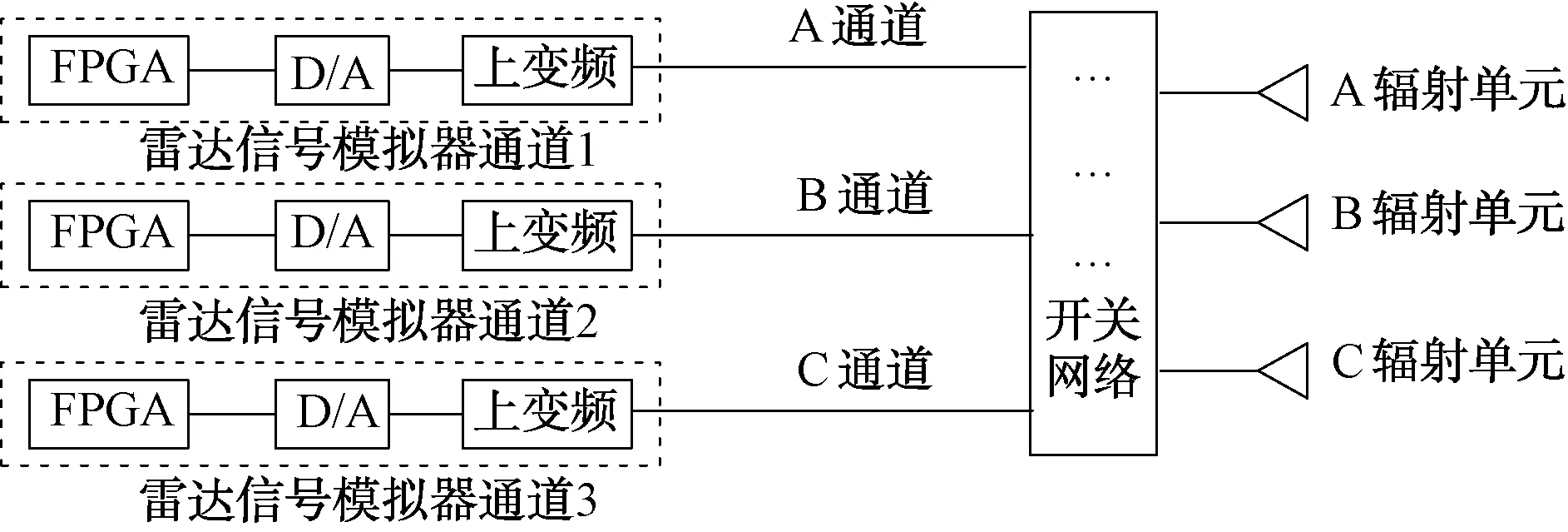
图9 改进后的馈电通道结构示意图
数字基带预失真技术原理如下:
假设雷达信号模拟器生成的典型信号表示为s(t),经过射频馈电链路辐射到暗室的雷达信号表示为r(t),其在时域可表示为:
r(t)=Tc(t)s(t)
(3)
式中:Tc表示射频馈电链路的幅频响应函数。
将r(t)变换到频域:
r(f)=Tc(f)s(f)
(4)
则该系统发射通道的频率响应为:
(5)
令GT(f)=1/HT(f),为了补偿天线阵列馈电通道三元组的幅度、相位不一致性,可对输入的信号进行预失真处理,经预失真处理后输入信号的频谱为:
(6)
将s′(f)变换至时域可得预失真处理后时域的输入信号s′(t)。
3.2 通道一致性改善仿真验证
为了便于分析,以三元组中2个通道的幅相一致性为仿真对象,首先假定雷达信号模拟器产生线性调频信号,带宽1 GHz,通道1和通道2预失真处理前的信号幅度和相位特性如图10所示。
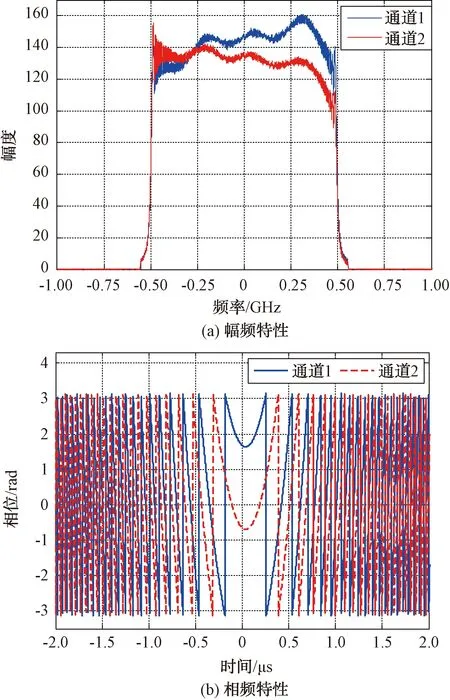
图10 未经预失真处理情况下通道幅相一致性
依据上述预失真补偿方法,首先用雷达信号模拟器对基带信号进行幅相预失真处理,经过处理后,通道1和通道2信号的幅度和相位特性如图11所示。经统计,当雷达信号模拟器产生同一斜率的线性调频信号时,经过上述预失真处理,三元组2个通道幅度平均一致性可控制在0.2 dB以内,相位平均误差可控制在2°以内。

图11 经预失真处理情况下通道幅相一致性
4 结束语
为了满足宽带雷达导引头的射频仿真需要,对射频仿真系统的宽带信号模拟质量提出了更高的要求。在数字基带对宽带信号进行预失真处理,可以克服射频器件自身特性带来的指标差异缺陷,有效改善天线阵列三元组馈电通道的宽带幅相一致性,从而提高系统宽带信号的角模拟精度。该方法为宽带设备射频仿真提供了一种新的思路,同时也对馈电通道的幅相特性精确标定提出了要求,需要在提高标校精度和效率方面开展进一步研究。
猜你喜欢
航天器工程(2023年2期)2023-05-31
舰船电子对抗(2022年5期)2022-11-25
科学技术创新(2021年11期)2021-05-25
山西大学学报(自然科学版)(2021年1期)2021-04-21
舰船科学技术(2021年12期)2021-03-29
通信技术(2020年9期)2020-09-27
五邑大学学报(自然科学版)(2019年3期)2019-09-06
电子技术与软件工程(2018年4期)2018-03-23
火控雷达技术(2016年1期)2016-02-06
计算机工程与设计(2015年1期)2015-12-20