
基于运动特性的海上目标磁场模拟数学模型
2023-05-05 04:02郭晨光程时锃
探测与控制学报 2023年2期
郭晨光,陈 浩,程时锃
(海军工程大学兵器工程学院,湖北 武汉 430033)
0 引言
随着水下探测技术的发展,对海上目标磁场探测分析的水平在快速提高,并带动了磁传感器的发展。老式的单轴磁传感器技术和改进的三轴磁场总量特征分析的方法已经是最为基础的方法[1],取而代之的是高精度的三轴磁传感器技术和三轴磁场独立特征分析计算的方法。探测手段的改进使得对目标的识别达到了新的高度,利用常规方式进行目标磁场模拟基本无法诱骗此类传感器的分析处理。因此,研究发展更有效的目标磁场模拟技术越来越受到重视。
当前一些文献资料介绍了关于目标磁场模拟的研究应用。例如,芬兰公司的模块化电磁扫雷具是一种目标设定式电磁扫雷,可用拖曳的方式模拟出舰船的磁场[2]。利用磁偶极子阵列可以很大程度上模拟目标磁场,磁偶极子个数越多模拟精度也越高。可是磁偶极子个数越多,工程上考虑到磁体大小、重量、能耗和成本这些方面也就越难实现[3]。因此,目前实际应用的目标磁场模拟装置基本采用单轴磁矩可控磁体阵列。
本文从海上目标磁场模拟的角度,给出基于偶极子阵列方式的目标磁场公式,利用目标运动特性,结合磁场梯度特性对目标模拟影响,分析和改进可控磁矩磁体对目标磁场模拟的实现方法。
1 海上目标磁场模拟
海上目标磁场是一个空间场[4],可以看作是空间分布的多个磁偶极子磁场的叠加[5],当目标在固定坐标空间中运动时,传感器接收到的是一个时间序列的信号,其时间序列信号的特征与目标类型、运动速度等状态有关,通常被称为运动特性。因此,在实验室静止状态下,可以用适当的磁体阵列根据时间变化产生具有通过特性的磁场信号,从而能够更加精确地模拟目标磁场,以此代替真实目标实际运动产生的磁场信号[6]。
根据以上分析,产生的时间序列信号不仅与目标的实际磁场分布情况有关,更重要的是包含对物理场信号的运动状态等信息。
1.1 基于目标磁场分布模拟目标磁场
大量的研究表明,目标下方的横向磁场分量Hy量值很小,作用区域也较小,而目标的纵向磁场分量Hx和垂直磁场分量Hz量值较大,是目标磁场的主要部分[7]。所以模拟目标磁场主要是模拟纵向磁场分量Hx和垂直磁场分量Hz。同时,根据磁场产生的本质,模拟效果的好坏最重要的指标是目标产生磁场的大小和各分量磁场的基本特征。
对于单轴磁体,在较远空间内产生的磁场等效于磁偶极子[8],以磁偶极子所在点为坐标原点,则空间任意一点(Rx,Ry,Rz)处的磁场强度为
其中,
假设利用K个磁偶极子进行目标磁场的模拟。这些磁偶极子的分布要考虑目标的尺寸和结构特征,通常将磁偶极子阵列放置于目标龙骨上方吃水线上,从船艏到船艉均匀分布[9]。由此建立关于磁矩参数的线性方程组:
将式(2)的方程组写成矩阵方程如下:
Fa·M=Hm,
(3)
式(3)中,磁场向量Hm为目标磁场在空间某点的测量值;磁矩向量M为设定的K个磁体的磁矩;系数矩阵Fa是由磁体与场点的相对位置确定的。
1.2 基于磁场梯度特性模拟目标磁场
磁场模拟装置不仅要模拟目标的静态分布特征,更需要能模拟不同速度通过的目标磁场特性,也就是运动特性。因此,磁矩可控磁体阵列必须具有相应的控制功能,以便使其产生的磁场强弱能在一定范围内按照需要的规律变化[10]。
对于海上目标,以前进方向为X轴,研究磁体按照其运动速度方向的变化量的拟合情况作为指标,模拟目标磁场,达到诱骗磁传感器识别的效果。根据磁偶极子的磁场分布规律,对偶极子磁场三分量在其运动方向上求导,得到目标以某一速度运动时,目标磁场在运动方向上磁场的变化量[11]。
以纵向磁场分量Hx为例,以其运动方向X轴求偏导,可得
(5)
由此化简可得
同理可得横向磁场分量Hy以其运动方向X轴的偏导数
(7)
垂直磁场分量Hz以其运动方向X轴的偏导数
因此,以磁体初始点作为坐标原点,则磁体在运动时空间任意一点(Rx,Ry,Rz)处的磁场梯度可化为
其中,各磁矩系数由式(5)—式(7)确定。
综上所述,根据式(8)得到单个磁体的磁场梯度特性。因此,由K个磁体组成的阵列进行目标磁场的模拟,建立关于磁矩参数的线性方程组:
将式(9)的方程组写成矩阵方程如下:
式(11)中,等式右侧为运动目标磁场在空间某点的磁场梯度测量值,磁矩向量M为设定的K个磁体的磁矩,磁体的系数矩阵Fc是由磁体与场点的相对位置确定的。
2 磁体阵列的综合磁场模型
综合上述两方面的讨论,建立目标磁场模型需要同时考虑目标磁场分布和磁场梯度特性,因此,联立式(3)、式(10)两个矩阵方程,即可得到磁体阵列的目标综合磁场模型。显然该方程属于超定方程,没有准确解,但可以利用最小二乘法求解最优解[12-13]。

(12)
式(12)中,系数β和λ用于调整磁体单元参数,0≤β≤1,λ≥0。
可得到
由式(13)求解,最终可以得到磁体模拟目标时的磁矩M。其中,两个参数的选取是根据经验和实际需要进行筛选,根据多次实践总结也能得出一些规律性的取值方法。
首先,从本质上,改进方法可以看作是对多目标优化求解问题,求解思路之一是利用权重系数将多目标优化问题转换为单目标优化问题[14]。因此,系数β和λ的取值可以根据需要调高某一系数的权重,以增大相应部分对模拟效果的影响。
其次,需要考虑两部分对求解结果的影响,保证各部分的误差值处在同一数量级。
最后,在具体计算上,可以利用最小二乘法分别对磁场分布和磁梯度分布的拟合误差进行求解,得到各个采集点的误差值;在这些采样点中找出最大值,例如磁场分布和磁梯度分布的拟合误差最大值分别为Z1和Z2,可以采用如下的取值方法:
根据实际需要再进行相应的微调,从而保证磁场分布和磁梯度分布的拟合误差值保持在同一数量级,并且两者均能够对综合模型产生较大的影响。
由于方程的数量较多,无法得到准确的模型参数解,而且其求解结果比较不稳定。为了得到稳定的模型参数求解结果,通过调整磁体阵列的位置和间距,保证了在使用不同航线独立测量的采样点数据时,求解得到的目标磁场模型参数的结果相容,从而能够在较高精度下解出目标的磁场信息,且对求解结果的精度进行误差分析。

3 实验验证与分析
为了检验本文目标磁场模拟方法的有效性,利用磁场分析软件和海上船舶实际磁场数据进行验证,所选取的数据是该目标某一深度的测量数据,同时对高频噪声进行滤波平滑处理,并进行采样。
如图1所示,测试船舶长为130 m,最大宽为10 m,用三分量磁通门传感器阵列放置在船舶下方平面进行磁场测量。当目标按照一定速度前进时,向着磁传感器的方向逐渐靠近并通过,最终传感器接收到目标按照一定速度前进时的磁场通过特性。
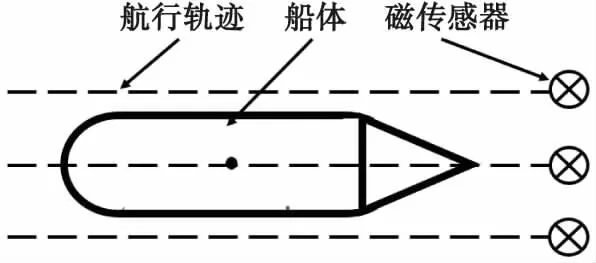
图1 实验示意图Fig.1 Sketch map of experiment
根据磁传感器的观测数据、各观测点与目标之间的位置信息等条件,利用本文方法进行基于运动特性的目标磁场模拟推算,从而得到可变磁矩磁体阵列在空间内的磁场分布规律。
由此,利用推算的磁场分布规律,计算指定深度的磁场强度,得到该换算深度的磁场估计值。同时,利用磁通门传感器阵列测到的磁场数据,作为该换算深度的实际磁场强度,并将其作为目标磁场的真实值。以此验证基于运动特性的磁场模型拟合程度。
为了验证改进方法的有效性和优越性,需要建立适合的评价标准[15]。
首先,根据数据分析,定义误差评估指标,相对误差:
其次,在常规方法中,通常仅仅对比目标磁场和模拟磁场的分布特性,而在结合磁场梯度的影响后,需要通过磁场分布特性和磁梯度特性的综合误差分析进行比较。
最后,由于评估指标的相对误差是无量纲的数值,因此可以把各项误差指标简单求和后,得出综合误差分析的优劣。
3.1 单轴磁体阵列对模拟精度的影响
根据许多实践观察,磁体数量不是越多越好,利用本文综合磁场模型对目标磁场进行模拟仿真,各单轴磁体大致均匀分布于船体位于龙骨上方中轴线上,从而能够充分模拟目标在船艏到船艉的磁场空间分布。模拟结果如表1所示,单轴磁体数目在6个时,拥有较好的精度,在各个方向上的误差也可以控制在20%左右,满足单轴磁体模拟目标磁场的要求。单轴磁体数量高于6个时,已经不能明显提高目标的模拟精度,部分指标也有较大的波动,可以认定盲目增加单轴磁体个数并不能大幅改善目标的拟合效果。

表1 三轴磁场强度的相对误差Tab.1 Relative error of triaxial magnetic field intensity
这种现象的产生主要是由于磁体阵列的结构为单轴串联结构,激励磁场虽然在整个空间范围内向四周发散,但产生的磁矩只在x轴上,而且单轴磁体阵列在x轴方向上是对称的,因此x轴和z轴方向上的磁场特性的相似度较高。
3.2 模拟效果分析验证
从上述分析可知,本文采用一列6个单轴磁体对目标磁场进行模拟,满足模拟精度的要求。在此基础上,按照常规方法和改进方法检验对目标磁场的模拟效果,误差分布情况如表2所示。
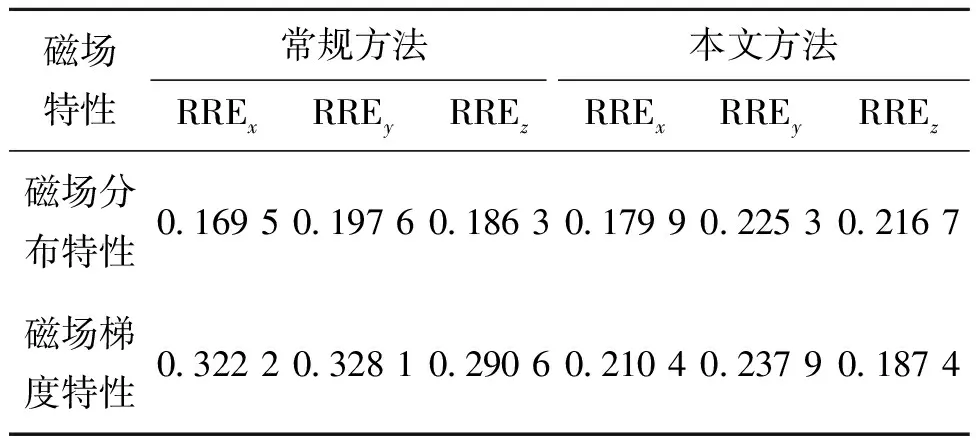
表2 目标磁场模拟误差分析Tab.2 Error analysis of target magnetic field simulation
从表2仿真结果可知,本文方法与常规方法在目标磁场空间分布特性上的模拟误差区别不大,两者的相对误差均在20%上下波动,其中,在磁场分布特性的拟合精度方面,改进方法的误差比常规方法稍微高了1%~3%。因此,常规方法的拟合精度稍高一些,但总体相差不大。
但是在磁场梯度特性的拟合效果上,可以看出本文方法具有明显优势,在X、Y、Z轴分量上分别高于常规方法10%以上,能够更好满足目标在运动状态下的磁场特性。
常规方法下测量点处X轴磁场的拟合情况如图2所示,可以看到:在通过特性曲线拟合方面,单轴磁体阵列基本可以拟合,精度较高;在磁场梯度特性曲线的拟合方面,虽然基本趋势符合实际情况,但是部分测量点处仍有较高的误差。
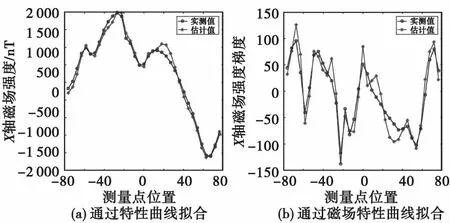
图2 常规方法磁体模拟效果(X轴)Fig.2 Simulation results of conventional methods (X axis)
利用改进方法,给出在测量点处目标磁场的模拟效果,如图3所示。经过分析可知:通过特性曲线的模拟效果趋近于常规方法,模拟精度相差不大,而且每个测量点的变化趋势基本符合真实情况;磁场梯度特性具有很好的拟合效果,各个测量点的梯度值模拟精度较高。通过两种模拟方式的对比,可以发现,如果不能完全模拟目标磁场的分布特性,其磁场梯度特性并不是随着通过特性曲线拟合精度的提高而提高。归根到底,产生这种现象的原因在于过多磁体的磁场叠加会造成磁场分布特性在真值处上下波动较大,不稳定。

图3 改进方法磁体模拟效果(X轴)Fig.3 Simulation results of improved methods (X axis)
最后,根据基于运动特性目标磁场模拟方法给出所有分量的模拟情况,如图4、图5所示。虽然常规方法的拟合曲线没有给出,但通过表2的各分量误差分析可知,改进方法的综合拟合效果要明显优于常规方法。通过特性曲线的模拟基本与常规方法相差不大,基于运动特性的拟合明显优于常规方法。因此,针对海上运动目标的模拟精度需要结合这两种特性指标综合考虑,才能得到更好的模拟效果。

图4 改进方法磁体模拟效果(Y轴)Fig.4 Simulation results of improved methods (Y axis)
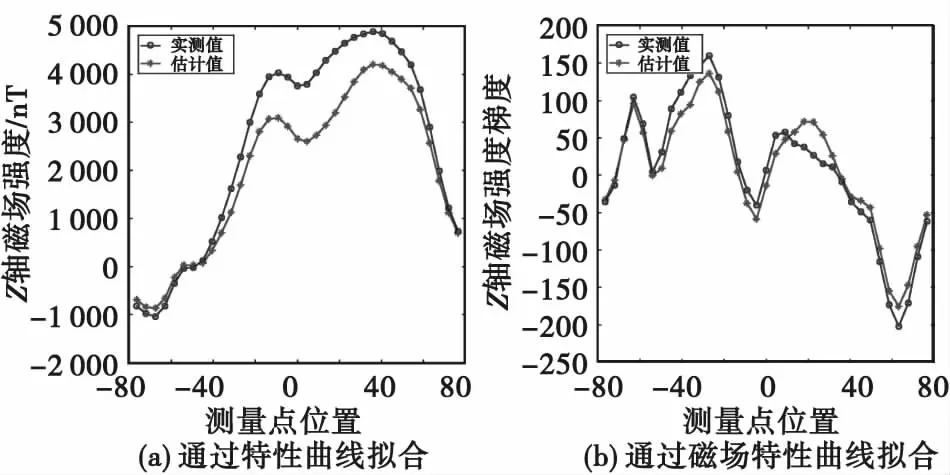
图5 改进方法磁体模拟效果(Z轴)Fig.5 Simulation results of improved methods (Z axis)
4 结论
本文针对常规的目标模拟方式整体模拟精度不高,局部模拟效果不理想的缺陷,提出了基于运动特性的磁场模拟的数学模型。通过充分的理论分析与实测数据检验,证实了该方法的有效性,且模拟效果要优于常规方法。同时,分析了两种方法在通过特性和磁场梯度特性方面的特点,能够看出,在通过特性的拟合精度相差不大的同时,本文方法能够更好模拟目标磁场特性,实现了利用较少数量的单轴可变磁矩磁体对目标磁场的高精度拟合,且较易于在实际工程中实现。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
北京航空航天大学学报(2017年9期)2017-12-18
自动化学报(2017年5期)2017-05-14
材料与冶金学报(2015年3期)2015-12-23
中国惯性技术学报(2015年1期)2015-12-19
深圳大学学报(理工版)(2015年6期)2015-11-26
云南电力技术(2015年2期)2015-08-23
物探化探计算技术(2015年2期)2015-02-28
上海航天(2014年1期)2014-12-31
金属加工(热加工)(2014年1期)2014-10-08
