站间通信延时对换相失败与恢复特性的影响
2023-05-13 08:19辛超山周红莲高贵亮尹纯亚
现代电子技术 2023年10期
辛超山,余 金,周红莲,高贵亮,尹纯亚
(1.国网新疆电力有限公司 经济技术研究院,新疆 乌鲁木齐 830011;2.新疆大学 电气工程学院,新疆 乌鲁木齐 830047)
0 引 言
基于LCC(Line-Commutated Convert, LCC)的特高压直流(Ultra-High Voltage Direct Current, U-HVDC)在长距离、大容量输电上具有巨大的经济优势[1-2]。作为LCC-UHVDC 最常见的故障,换相失败及其恢复特性的功率、电流大幅度波动是威胁交直流混联电网稳定运行的主要因素[3-4]。
随着特高压直流输电的电压等级、输电距离以及输电容量的不断提升,整流站与逆变站之间的通信交互时间也会随之增大[5],站间通信延时对换相失败及其恢复特性的影响不容忽视。
现有关于换相失败方面的研究主要集中在换相失败影响因素、连续换相失败以及换相失败预防措施方面。
在换相失败影响因素方面,文献[6]通过建立关断角模型,得出直流电流上升与交流系统电压降低是影响换相失败的主要影响。除此之外,文献[7-11]分别分析了谐波、故障发生时刻、故障合闸角、交流系统电压下降速度、逆变侧控制类型对换相失败影响;文献[12-13]得出直流闭锁可能引发健全直流换相失败的风险。但以上研究都未提及站间通信延时对换相失败的影响。
在首次换相失败恢复方面的研究多集中在直流系统连续换相失败分析与抑制措施上。
文献[14-15]分别通过对低压限流控制、电流偏差控制进行改进,提出了抑制连续换相失败的措施。
文献[16]得出直流系统在首次换相失败之后,逆变侧控制系统交互不当是引发连续换相失败的主要原因;文献[17-18]分别研究了单相跳闸、锁相环对连续换相失败的影响。
文献[19]分析了直流系统故障恢复过程中可能存在的换相失败风险。但以上研究都认为在首次换相失败恢复过程中,直流系统会出现连续换相失败的风险,并未考虑站间通信延时对首次换相失败恢复特性的影响。虽然文献[5]在附录中仿真分析了通信延时对所提控制策略的影响,但并未进行深入探讨。
为研究站间通信延时对换相失败及恢复特性的影响,本文首先分析换相失败的影响因素,基于CIGRE HVDC 标准测试系统建立考虑延时影响的运行曲线,分析通信延时对首次换相失败的影响;其次,通过对不同延时进行分类,分析首次换相失败后不同延时对系统恢复的影响;最后基于PSCAD 仿真软件搭建不同延时下的仿真模型,对理论分析进行验证。
1 站间通信延时对换相失败的影响分析
1.1 换相失败影响因素
逆变器关断角过小是导致换相失败的主要原因,因此当逆变器实际关断角γ小于换相所需的最小关断角γmin时,认为发生换相失败,γ可表示为:
式中:β为逆变器超前触发角;φ为换相电压过零点偏移角;Ti为逆变侧换流变压器变比;Id为直流电流;XCi为逆变侧换相电抗。
由式(1)可以看出,逆变侧换流母线电压降低、直流电流增大是影响逆变器换相失败的主要原因。当γ小于γmin时,逆变器发生换相失败,在本文中将γmin=7.2°作为逆变器换相失败判据。
1.2 站间通信延时对换相失败的影响分析
直流输电线路一般比较长,如±1 100 kV 吉泉直流线路长度达到3 200 km,即使在最理想的情况下,信号从逆变侧到达整流侧的时间也会达到10 ms。再加上信号处理、中继器等的影响,整流站与逆变站通信交互每1 000 km 通常耗时20~30 ms,本文考虑将每1 000 km耗时设为25 ms,且考虑到实际直流线路长度,因此直流输电距离所带来的通信延时(td)在0~75 ms 之间。另一方面,为了使经VDCOL 限制后的直流电流指令值平稳变化,VDCOL 的投入与退出都设置有不同的时间常数,设VDCOL 投入(对应于直流电压下降)时的典型时间常数为Td,退出(对应于直流电压上升)时的典型时间常数为Tu。
系统稳态运行时的直流电压可表示为:
式中:ULr为整流侧换流母线电压;Udr为整流侧直流电压;XCr为整流侧换相电抗。
根据式(2)可知,当逆变侧交流系统发生故障导致换流母线电压降低时,会引起Udi降低,从而引起直流电流上升,此时逆变侧交流电压降低与直流电流的上升将会共同作用引起关断角降低。由于直流电压降低,VDCOL 计算得到的直流电流指令值也会降低。
当整流站与逆变站间无通信延时,降低的直流电流指令值可直接送往整流侧定电流控制器,整流侧触发角快速上升,根据式(2),整流侧直流电压(Udr)快速下降,直流电流可快速降低。
当整流站与逆变站间有延时影响时,整流侧定电流控制无法及时接收到直流电流指令值,会导致整流侧直流电流目标值滞后于原系统,直流电流指令值仍然维持在故障前的值(1 p.u.),整流侧定电流控制器输入ΔIdr会偏小,导致整流侧触发角上升不足;整流侧直流电压仍然会维持在一个较高的值,即在交流系统故障初期,站间通信延时会对直流电流有助增作用。根据式(1)可知,直流电流的进一步增大会引起关断角的进一步降低,增大换相失败风险。
2 站间通信延时对换相失败恢复特性的影响
在直流系统首次换相失败期间,直流电压与直流功率短时降为0,由于VDCOL 作用,直流电流会维持在一个较低的值;由于定关断角控制的作用,在换相失败恢复的瞬间,关断角与触发超前角将会维持在一个很大的值。
当首次换相失败之后,直流系统开始恢复,直流电压从0 开始上升,直流电流指令值也会随之上升,直流功率逐渐开始恢复。
对于CIGRE HVDC 系统,由于直流电流指令值在恢复期间大于直流电流实际值,因此CEC 控制的输入为正,CEC 控制开始起作用,增大定关断角控制的输入,逆变侧维持在定关断角控制。当不考虑站间通信延时,VDCOL 投入与退出时的时间常数对直流电流指令值的影响如图1 所示。
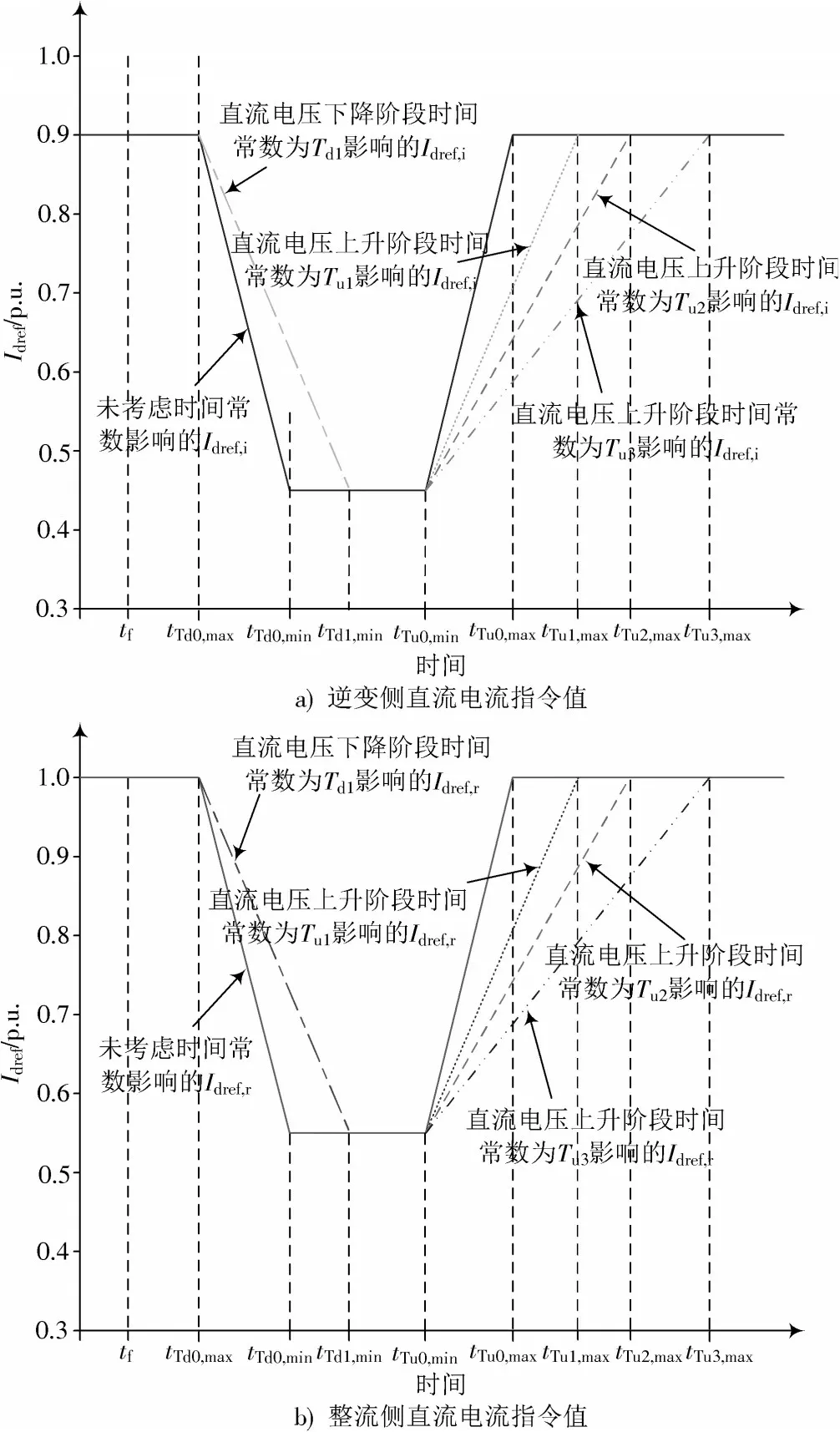
图1 考虑VDCOL 时间常数影响的直流电流指令值
图1中:Td1表示直流电压下降阶段的时间常数;Tu1、Tu2、Tu3分别为直流电压上升阶段的不同时间常数,且Tu3>Tu2>Tu1;tf为逆变器故障发生时刻;tT,max为VDCOL 启动电压为0.9 p.u.的时间;tT,min为VDCOL 启动电压为0.4 p.u.的时间。下标d 表示直流电压降低阶段;下标u表示直流电压上升阶段;下标0 表示未考虑VDCOL 时间常数;下标1、2、3 分别表示Td1与Tu1、Tu2、Tu3时间常数下的影响。
由图1 可以看出,当VDCOL 有时间常数时,会改变原有的VDCOL 控制特性,在直流电压下降阶段与直流电压上升阶段都会导致直流电流指令值的延迟,且随着时间常数的增大,直流系统恢复到正常状态的时间越长。
在图1 的基础上考虑站间通信延时,在直流系统换相失败恢复阶段会导致整流侧控制接收上升的直流电流指令值不及时,整流侧电流指令值与逆变侧电流指令值存在以下两种情况:
1)整流侧直流电流指令值仍然大于逆变侧直流电流指令值;
2)整流侧直流电流指令值小于逆变侧直流电流指令值。
将图1 所示的VDCOL 时间常数的影响考虑在内,VDCOL 启动电压下降到0.9 p.u.的时间为tTd,max,启动电压下降到0.4 p.u.的时间为tTd,min,启动电压上升到0.4 p.u.的时间为tTu,min,启动电压上升到0.9 p.u.的时间为tTu,max。在此情况下,整流侧直流电流指令值与逆变侧直流电流指令值的关系如图2 所示。

图2 不同站间通信延时影响下的直流电流指令值
图2中:td1、td2与td3分别表示不同的通信延时,在本文中用工况1、工况2、工况3 表示。
当站间通信延时为td1时(工况1),整流侧直流电流指令值恒大于逆变侧直流电流指令值,系统存在稳定运行点,可以快速恢复。
当站间通信延时为td2(工况2),逆变侧直流电流指令值(Idref,i)开始上升时,整流侧直流电流指令值(Idref,r)保持不变,Idref,r与Idref,i相等的点(如图1中的A点与B点),在其对应的[tA,tB]时间内,Idref,i大于Idref,r。首先CEC控制动作,逆变侧维持在定关断角控制,整流侧处于定电流控制,系统无法建立稳定运行点,实际直流电流维持在较低水平;随着Idref,i上升,逆变侧电流偏差变大,促使逆变侧切换为定电流控制,此时整流侧与逆变侧同为定电流控制,实际直流电流会在Idref,r与Idref,i之间波动上升,逆变侧直流电流偏差逐步减少,在CEC 的作用下,逆变侧又会切换至定关断角控制。在B点之后,Idref,r大于Idref,i,此时系统可以建立稳定运行点,系统恢复稳定运行。因此,当通信延时为td2情况时,会导致直流系统恢复变慢。
当站间通信延时为td3时(工况3,td3>tTu,min),在换相失败初始阶段,Idref,r仍然为1 p.u.,此时Idref,r大于Idref,i,直流系统可以快速恢复到故障前的值,但由于之后Idref,r会不断下降,整流侧定电流控制会将直流电流降低,受此影响,直流电压也会随之降低,VDCOL 会再次动作重新输出直流电流指令值。
因此直流电流会呈现先上升后降低再上升、降低的趋势,随着整流侧定电流控制器电流偏差不断变小,直流系统会经历数个波动(直流电流先上升后降低)达到稳定。
因此,此通信延时情况下会导致直流系统在恢复过程中的直流电流、直流电压、直流功率不断波动,不仅影响直流恢复速度,也会对交流系统造成不断冲击。
综上所述,随着站间通信延时的增大,直流系统换相失败恢复特性会变差,通信延时一方面会延长直流系统的恢复时间;另一方面可能导致直流系统电气的大幅度波动,影响交直流系统的安全稳定运行。
3 算例分析
基于PSCAD/EMTDC 仿真软件,搭建CIGRE 直流系统模型。VDCOL投入与退出时的时间常数分别为10 ms与20 ms,分别选取通信延时td为0 ms、25 ms、50 ms 与75 ms 进行仿真分析。
算例1:设置故障电阻为210 Ω,故障持续时间为0.05 s,三相短路故障下的关断角、逆变侧直流电流、直流电压、直流功率仿真波形如图3 所示。其余直流电气量仿真波形如图4、图5 所示。

图4 不同通信时延下超前触发角仿真波形(Rf=210 Ω)

图5 不同通信延时下直流电流指令值、整流侧直流电压、直流电流功率仿真波形(Rf=210 Ω)
由图3可以看出:逆变侧换流母线发生电阻为210 Ω的三相短路故障,td为0 时,关断角未降低到最小关断角,直流电压未短时降为0,逆变器未发生换相失败;当td为25 ms、50 ms 与75 ms 时,直流电压短时为0,直流电流与直流功率大幅度波动,逆变器均发生了换相失败。仿真结果验证了站间通信延时会增大换相失败风险,与前文分析结果一致。
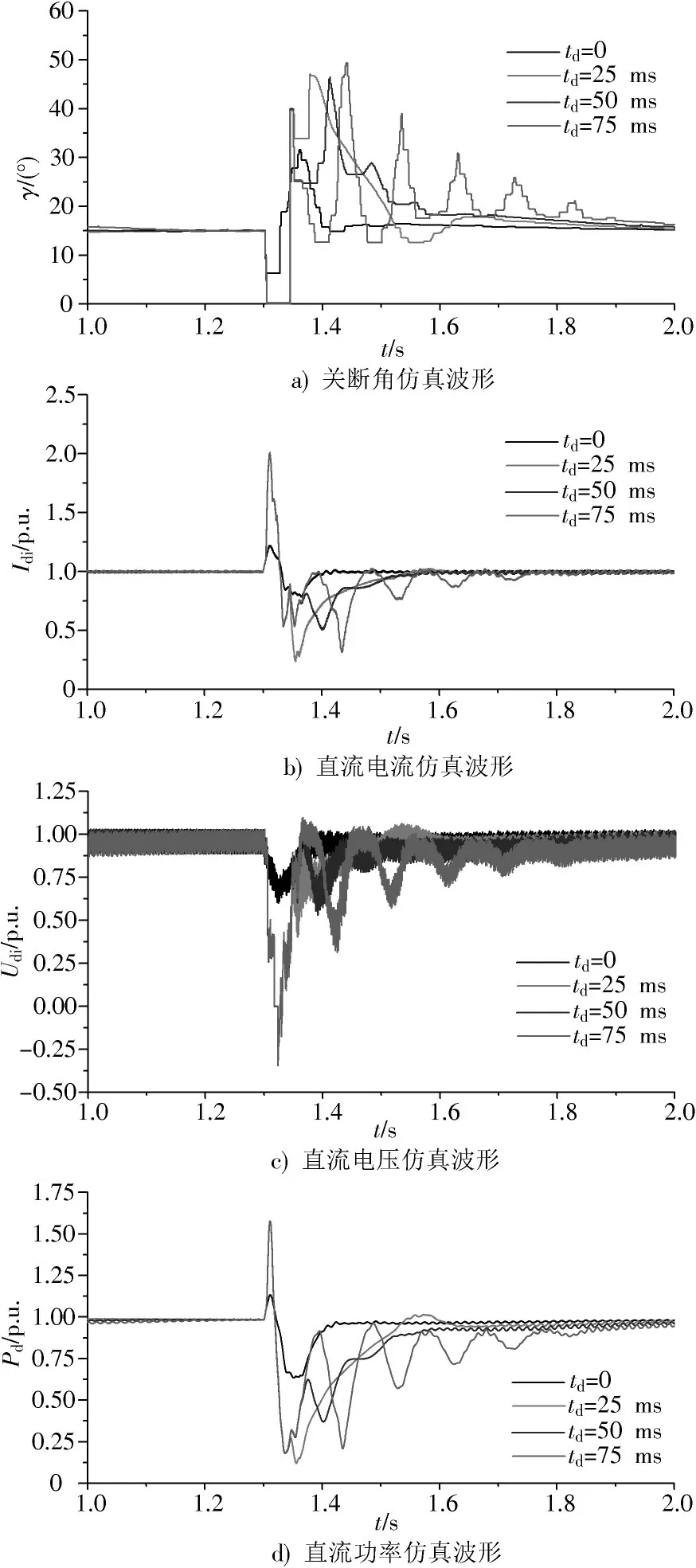
图3 不同通信延时下的关断角、直流电流、直流电压、直流功率仿真波形(Rf=210 Ω)
通信延时的影响使得系统无法快速恢复到故障之前的稳定值,当td为25 ms、50 ms 时,其换相失败恢复趋势总体保持一致,处于图2 中的工况2 情况,故未引起直流电气的剧烈波动,直流系统会逐步缓慢恢复正常运行。
随着通信延时的增大,当td为75 ms 时,此时处于图2 中的工况3,系统无法快速建立稳定运行点,直流电流、直流电压、直流功率呈现周期性衰减的波动过程,并在波动中缓慢达到稳定运行状态。
算例2:设置故障电阻为10 Ω,故障持续时间为0.05 s,三相短路故障下的关断角、逆变侧直流电流、直流电压、直流功率仿真波形如图6 所示。
不同通信延时下超前触发角仿真波形(Rf=10 Ω)如图7 所示。
不同通信延时下直流电流指令值、整流侧直流电压、直流电流功率仿真波形(Rf=10 Ω)如图8 所示。
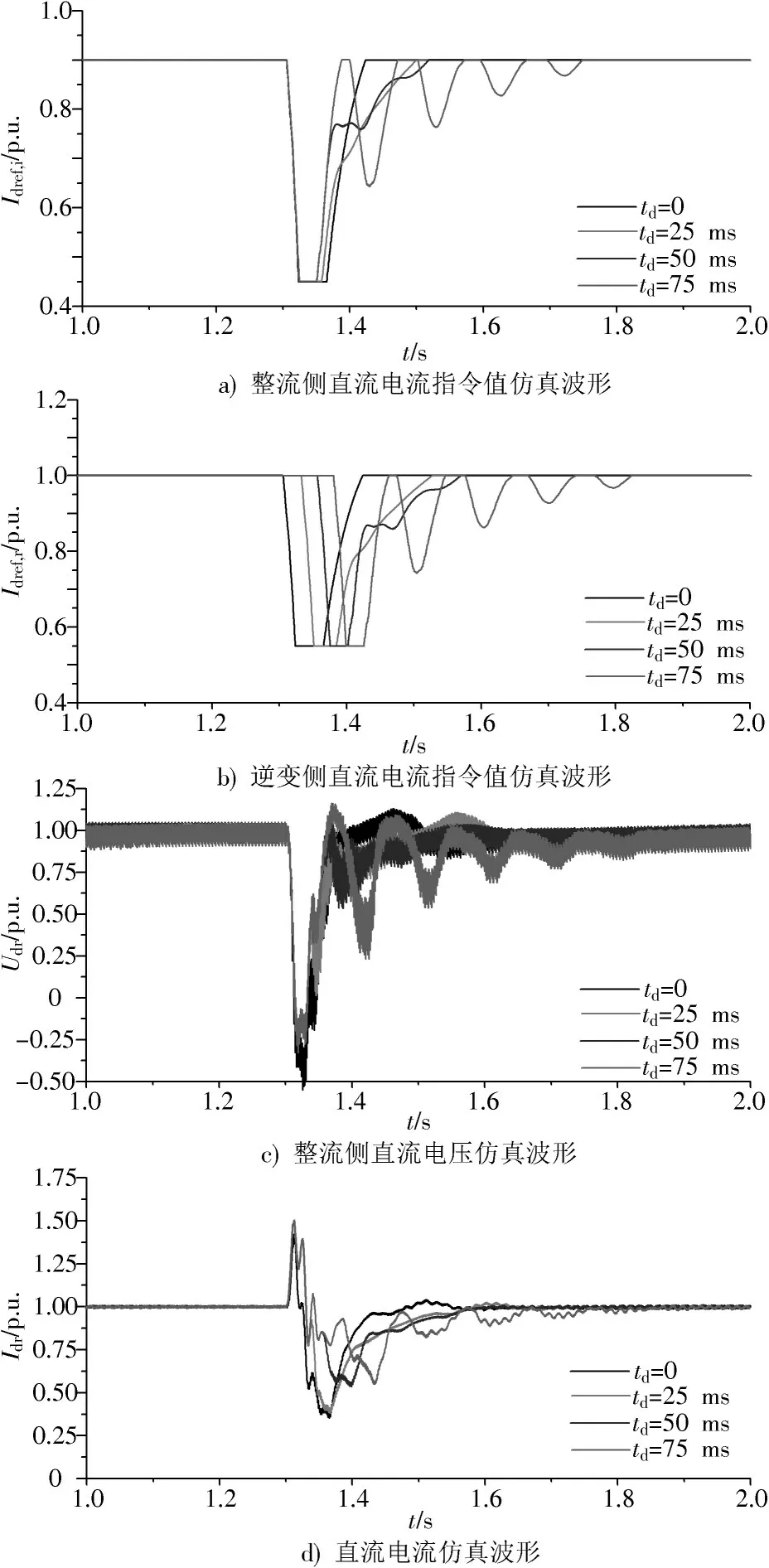
图8 不同通信延时下直流电流指令值、整流侧直流电压、直流电流功率仿真波形(Rf=10 Ω)
本文定义直流电流恢复时间(Current Recovery Time, CRT)来表征直流系统换相失败恢复速度;CRT 为故障后直流电流恢复到95%正常运行值(0.95 p.u.)的时间。算例1 与算例2 在不同延时下的直流系统换相失败恢复时间(CRT)如表1 所示。
从图6 的仿真结果可以看出,四种通信延时下逆变器都发生了换相失败。结合表1 结果与图3 仿真结果,与无通信延时的仿真结果相比得出,随着通信延时的增大,直流系统从换相失败中恢复到稳定运行的时间会变长,当td为75 ms 时,算例1 与算例2 分别 需 要 经过0.621 3 s 与0.571 4 s 才能恢复正常运行;而算例2 中未考虑延时的情况下,直流系统只需要经过0.326 5 s 就能恢复正常运行。

图6 不同通信延时下的关断角、直流电流、直流电压、直流功率仿真波形(Rf=10 Ω)
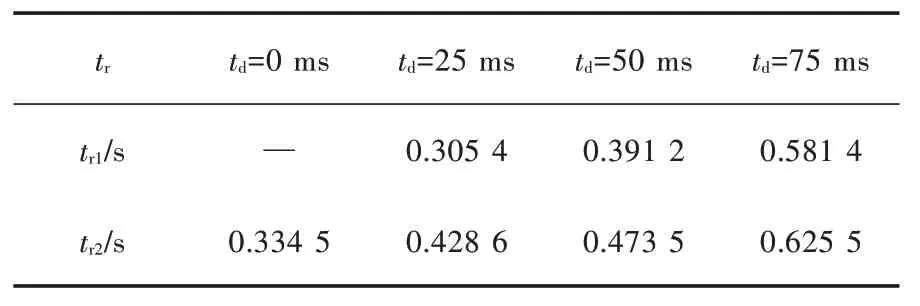
表1 不同延时的系统恢复时间
算例2 的仿真结果与算例1 类似,当通信延时对换相失败恢复的影响处于工况2 时,只会延缓直流系统的恢复速度;当处于工况3 时(td=75 ms),不仅系统恢复速度变慢,还会引起恢复期间直流电流、直流电压、直流功率的大幅度、长时间波动。工况3 下的影响比工况2 的影响更为严重。
综上所述,通信延时一方面会降低逆变器关断角,增大换相失败的风险;另一方面,也会影响系统的稳定运行点,使得系统无法快速恢复。
直流系统恢复较慢及可能引起的波动将会对交流系统造成更严重的冲击。
4 结 论
在交流系统故障初期,站间通信延时会导致整流侧定电流控制的直流电流指令值滞后,呈现出对直流电流有助增作用而无法及时地降低直流电流,从而增大换相失败风险。通信延时对换相失败恢复特性的分析结果表明:通信延时会阻碍直流系统从换相失败中恢复,随着通信延时的增大,直流系统恢复到正常运行状态的时间也越长;当站间通信延时处于工况3 时,会引起直流系统恢复过程中电气量的剧烈波动,呈现周期性衰减振荡特性。基于CIGRE HVDC 的仿真结果验证了本文分析结果的正确性。相关结论可为特高压直流换相失败预防措施、交直流系统交互影响分析提供理论依据与参考。
猜你喜欢
电子科技大学学报(2023年5期)2023-10-14
自动化仪表(2020年10期)2020-11-13
重型机械(2019年3期)2019-08-27
计算技术与自动化(2019年4期)2019-08-13
船舶力学(2015年6期)2015-12-12
物探化探计算技术(2014年1期)2014-06-27
汽车维护与修理(2014年10期)2014-02-28
河南科技(2014年23期)2014-02-27
电气电子教学学报(2013年1期)2013-07-05
长江大学学报(自科版)(2012年19期)2012-11-21