
输入受限下的无人机编队控制方法研究
2023-05-14 08:06卢帅多胡盛斌
计算机时代 2023年5期
卢帅多 胡盛斌
摘 要: 针对多旋翼飞行器在轨迹跟踪过程中控制输入受限的问题,设计了一种控制输入受限下的四旋翼无人机协同编队分布式控制算法。首先,对于外环位置子系统,基于线性矩阵不等式的方法,设计了输入受限下的多旋翼飞行器的编队控制律,使得所有无人机的位置收敛到所需的编队模式。其次,对于内环姿态子系统,采用基于双曲正切的方法设计控制输入受限的控制律,使多无人机的姿态趋于一致。最后,基于 Lyapunov稳定性理论,证明了系统的稳定性,仿真结果表明,所设计的控制器能够达到良好的协同跟踪控制效果。
关键词: 旋翼无人机; 编队控制; 输入受限; 线性矩阵不等式; 双曲正切
中图分类号:TP275 文献标识码:A 文章编号:1006-8228(2023)05-25-06
Distributed formation control for multiple quad-rotor under input constraints
Lu Shuaiduo, Hu Shengbin
(Shanghai University of Engineering Science, Shanghai 201620, China)
Abstract: Aiming at the problem of restricted control inputs in the trajectory tracking process of multi-rotor UAV, a distributed control algorithm for cooperative formation of quad-rotor UAV with restricted control inputs is designed. Firstly, for the outer loop position subsystem, based on the linear matrix inequality method, the formation control law of the multi-rotor aircraft under the input constraints is designed, so that the positions of all UAVs converge to the desired formation mode. Secondly, for the inner loop attitude subsystem, a method based on hyperbolic tangent is used to design a control law with constrained control input, so that the attitudes of multiple UAVs tend to be consistent. Finally, based on the Lyapunov stability theory, the stability of the system is proved, and the simulation results show that the designed controller can achieve a good cooperative tracking control effect.
Key words: UAV; formation control; input constraints; LMI; hyperbolic tangent
0 引言
近年來,四旋翼无人机发展迅速,相比于固定翼飞行器,其凭借体积小、结构简单、飞行方便等特点,在航拍、灾害监测、地质勘探等各个领域得到了广泛的应用。而在一些复杂和特定的环境中,多个无人机协同工作比单个无人机优势更明显,但同时也对无人机编队系统的稳定性和一致性有更高的要求,目前多无人机系统的编队问题逐渐成为无人机研究的重要方向。
四旋翼飞行器是典型的多输入、多输出、非线性、强耦合的欠驱动系统[1]。针对无人机编队的队形形制、编队通信、一致性等问题,国内外研究人员展开了深入的研究,提出了许多经典编队控制方法。目前,无人机编队策略主要分为集中式策略和分布式策略。文献[2]采用领航者-跟随者的编队方法,分别规划好领航者和跟随者飞行轨迹,实现无人机编队。文献[3]研究了具有非线性动态模型的多智能体系中的领导者和跟随者的一致性问题。文献[4]结合传统的PID控制方法,设计了四旋翼编队控制器。文献[5]采用分布式模型预测控制和基于一致性的控制方法,实现了无人机编队的协同编队飞行。但是无人机编队中的控制输入受限问题仍然是一个难点,针对这一问题,文献[6]对航天器设计了一种控制输入及其变化率受限的姿态跟踪控制器,可以克服航天器飞行过程中的不确定性和外部干扰,但设计参数过多。文献[7]采用最优控制策略设计了航天器的控制器,使控制输入减小并保证系统的稳定性,但此方法不能保证控制输入在给定的范围内变化。
针对输入受限情况下的多无人机编队的一致性问题,本文的主要工作内容如下:①基于图论设计了分布式的无人机协同跟踪控制问题,可以提高无人机的通信效率;②针对外环子系统,采用线性矩阵不等式的方法设计了控制输入受限的控制器,使编队系统的位置跟踪达到一致;③针对内环子系统,采用基于双曲正切的方法设计了控制输入受限的控制器,使编队系统的姿态跟踪达到一致;④采用Lyapunov理论证明设计控制律的稳定性,并在matlab中进行仿真验证所设计的编队系统的有效性。
1 预备知识
在本节中,介绍了所需的基本概念和相关引理并给出了本文的问题描述。
1.1 图论
图通常用一个二元组[G=V,E]表示,其中[V=v1,v2,…,vn]表示有[n]个节点,边集[E?V×V]表示为[vi,vj],即尾节点[vi]和头节点[vj]之间的连线,代表[vj]可以给[vi]传递信息,顶点[v]的入度是指以[v]为头的弧的数目;顶点的出度是指以[v]为尾的弧的数目。图[G]中节点之间的邻接关系可以用邻接矩阵[A=aijn×n]表示,其中[aij]表示节点[vj]到节点[vi]的权重。设矩阵[D=diagd1,d2,…,?n],其中[?i=j=1naij]表示节点的加权入度。用图[G]的拉普拉斯矩阵[L=D-A],即入度矩阵[D]与邻接矩阵[A]的差值来更清楚地描述节点之间的拓扑关系。无人机群编队的期望轨迹为领导者的飞行轨迹,设[gi,?∈1,2…,n]表示第[?]个四旋翼无人机和领导者之间的连接权重,若第[?]架无人机与领导者之间有连接,则[gi>0],否则[gi=0],设矩阵[G=diagg1,g2,…,gn]。
1.2 相关引理
引理1 如下動态系统为全局渐进稳定:
[x1=x2x2=-αtanhkx1+lx2-βtanhlx2]
其中,[α、β、k、l>0]。
引理2 存在一个闭环系统[x=IN?A-cL?BKx],则此系统的稳定性性质等价于以下N阶系统:
[A-cλiBK]
其中,[λi]为N阶拉普拉斯矩阵L的特征值,[?=1,…N]。即它们有相同的特征值。
定理1 Schur补定理:假设C为正定矩阵,则[BC-1BT≤A]等价于[ABBTC≥0]。
2 问题描述
本文主要研究一组输入受限情况下的四旋翼无人机的编队控制问题。输入受限是指无人机的控制输入(升力、力矩等)不能无限大而是保持在预先设计好的有限范围内。假设一个有[n]个四旋翼的多智能体系统,[n]个四旋翼无人机之间的拓扑关系可以用图G来描述,其中每个无人机对应图G中的一个节点。若一个节点的入度为零,则称其为领导者,否则为跟随者。一般来说,描述四旋翼无人机的信息由六个自由度变量组成,即外环的三个位置信息和内环的三个姿态信息,其坐标可以描述为:
[xi,yi,zi,?i,θi,ψiT∈R6,?∈1,2…,n] ⑴
其中,[(xi,yi,zi)∈R3]是第[i]个无人机在空间中的的位置信息,[(?i,θi,ψi)∈R3]是描述无人机姿态的欧拉角。
2.1 无人机动力学模型
设有n架四旋翼无人机,则第[i]个无四旋翼人机的动力学模型可以描述为:
[xi=-K1mxi+cos?isinθicosψi+sin?isinψimu1iyi=-K2myi+cos?isinθisinψi-sin?icosψimu1izi=-K3mzi-g+cos?icosθimu1i?i=1Ixu2i+Iy-IzIxθiψiθi=1Iyu3i+Iz-IxIy?iψiψi=1Izu4i+Ix-IyIz?iθi] ⑵
其中,[xi],[yi],[zi]分别是无人机在地面坐标系中沿三个轴的位移,[?i]是滚转角,[θi]是俯仰角,[ψi]是偏航角。[m]表示无人机的质量,[kjj=1,2,…,6]表示相应的空气阻力系数,[Ix],[Iy,Iz]分别为系统绕三个轴的转动惯量。[ui]是四个旋翼产生的总推力,[u2i],[u3i],[u4i]是四旋翼飞行器的旋转动力。[g]是重力加速度。
2.2 控制目标
四旋翼的编队问题本质上是跟踪问题,对于外环子系统,定义期望的编队轨迹[Xd=xd,yd,zdT],即领导者的轨迹。定义领导者和跟随者之间的轨迹偏差[epi=Xi-Xd-?i],其中[Xi=[xi,yi,zi]T]表示第[i]个四旋翼飞行器的轨迹状态。[?i=[?xi,?yi,?zi]T]表示第[i]个跟随者与领导者之间的距离。设计合适的控制律并采用LMI的方法求出控制增益K,使得当[t→∞],跟随者与领导者之间的位置误差趋于零,控制输入收敛到一定的范围。
对于内环子系统,定义领导者与跟随者之间的姿态误差[eai=Θi-Θdi],其中[Θi=[?i,θi,ψi]T],[Θi=[?di,θdi,ψdi]T]。采用输入受限下的双曲正切的方法设计合适的控制律,使得当[t→∞],跟随者与领导者之间的姿态误差趋于零。
3 系统设计
3.1 外环控制器设计
对于等式⑵,我们得到外环子系统如下:
[xi=-K1mxi+cos?isinθicosψi+sin?isinψimu1iyi=-K2myi+cos?isinθisinψi-sin?icosψimu1izi=-K3mzi-g+cos?icosθimu1i] ⑶
定义虚拟控制变量:
[τxi=cos?isinθicosψi+sin?isinψimu1iτyi=cos?isinθisinψi-sin?icosψimu1iτzi=-g+cos?icosθimu1i] ⑷
则等式⑶可改写为:
[xi=-K1mxi+τxiyi=-K2myi+τyizi=-K3mzi+ τzi] ⑸
由于[x,y,z]三个方向的动力学模型结构类似,因此我们以[x]轴的模型为例设计控制律。定义[x]轴跟随者与领导者之间的轨迹误差:
[expi=xi-xd-?xi] ⑹
对等式⑹求导可得跟随者与领导者之间的速度误差:
[exvi=expi=xi-xd] ⑺
则第[i]个无人机x轴方向的轨迹误差定义如下:
[δxi=[expi,exvi]T] ⑻
则可得系统状态空间方程:
[δxi=010-K1mδxi+0τxi-xd-K1mxd=Axδxi+Bτxi] ⑼
其中,[Ax=010-K1m],[B=01],[τxi=τxi-xd-K1mxd]。
设计控制律为:
[τxi=-ck1j=1Naijexpi-expj+giexpi]
[-ck2j=1Naijexvi-exvj+giexvi] ⑽
根据无人机之间的拓扑关系,外环子系统的控制律可改写为:
[τx=-cL+G?Kxδx] ⑾
结合式⑽和⑾,可得x轴方向的无人机闭环位置子系统:
[δx=(IN?Ax-cL+G?BKx)δx] ⑿
其中,[?xi=0],[G=diag(g1,g2,…,gN)],[L]為通信拓扑图的拉普拉斯矩阵,[IN]表示[N]阶单位对角阵,[τx=[τx1,τx2,…,τxN]T],[τx=[τx1,τx2,…,τxN]T],[Kx=[kx1,kx2]],[δx=[δx1,δx2,…,δxN]T],[Kx]为需要LMI设计的反馈矩阵。控制目标为通过设计LMI求解[Kx],实现[δx→0],[τ≤τmax]。
构造Lyapunov函数如下:
[V=12δxTPδx] ⒀
其中,[P>0,PT=P]。通过[P]的设计可有效地调节[s]的收敛结果,并有利于LMI的求解。
对式⒀求导得:
[V=12δx.TPδx+12δxTPδx.]=[12δxTHTP+PHδx] ⒁
其中,[H=(IN?Ax-cL+G?BKx)],令[Q=HTP+PH]。
为了实现指数收敛,即[V≤-αV],取
[αV+V=αδxTPδx+δxTQδx=δxTαP+Qδx]
取[αP+Q<0],[α>0],则[αV+V≤0],即[V≤-αV],由不等式求解定理可解得:
[Vt≤V0exp-αt≤V0]
如果[t→∞],则[Vt→0],[δx→0]且指数收敛。
由于[V0=δT0Pδ0],如果存在正定对称阵[P]和[ω>0],使得[sT0Ps0≤ω]成立,则可保证[V0≤ω],即可保证[Vt≤ω]。
取[KxT?L+G2?Kx≤ω-1τ2maxP],由[τx=-cL+G?Kxδx]可得:
[τx2=-cL+G?KxδxT-cL+G?Kxδx]
[≤c2δxTω-1τ2maxPδx]≤[c2τ2max]
则[τx≤cτmax]。
通过上述分析,构造两个LMI如下:
[αP+Q<0] ⒂
[KxT?L+G2?Kx-c2ω-1τ2maxP≤0] ⒃
根据引理2,可得[H]等价于[A-cλiBKx],则可将式⒂中的[Q]展开如下:
[αP+(A-cλiBKx)TP+P(A-cλiBKx)]
[=αP+ATP+PA-cλiBKxTP-cλiPBKx<0]
其两边同乘[P-1]可得
[αP-1+P-1AT+AP-1-cλiP-1KxTBT-cλiBKxP-1<0] ⒄
取[k0=c2ω-1τ2max],则不等式线性化为[KxT?L+G2?Kx≤k0P]。
根据定理1,式⒃等价于:
[k0PKxTKx1≥0]
其左右两边同乘[P-1001],可得
[k0P-1P-1KxTKxP-11≥0] ⒅
令[F=KxP-1]和[N=P-1],则[P-1KxT=FT],则式⒄和式⒅可得第1个和第2个LMI:
[αN+NAT+AN-cλiFTBT-cλiBF<0] ⒆
[k0NFTF1≥0] ⒇
根据P的定义,可设计第3个LMI:
[P>0, P=PT] (21)
要满足[δT0Pδ0≤ω],根据定理1,可将其设计为第4个LMI:
[ωδT0δ0N≥0] (22)
通过这4个线性矩阵不等式,即式⒆-式(22),设计合适的[τmax]和[α]值,可求得有效的[K]。
同理,可设计第[i]个无人机的[y]轴和[z]轴模型的控制律:
[τy=-cL+G?Kyδy] (23)
式(24)可改写为
[τz=-cL+G?Kzδz] (24)
3.2 内环控制器设计
对于内环姿态子系统:
[?i=Iy-IzIxθiψi+1Ixu2iθi=Iz-IxIy?iψi+1Iyu3iψi=Ix-IyIz?iθi+1Izu4i] (25)
由式(25)可得
[Θi=MΘi+WTi] (26)
其中,
[Ti=[u2i,u3i,u4i]T],[M=0Iy-IzIxψi0Iz-IxIyψi00Ix-IyIzθi00],
[W=1Ix0001Iy0001Iz]。
定義第[i]个无人机和期望姿态之间的误差:
[ei=Θi-Θd]
则有
[ei=Θi-Θd],[ei=Θi-Θd=MΘi+WTi-Θd]
其中,[Θi=?i,θi,ψiT∈R3]为惯性坐标系中四旋翼飞行器的滚转、俯仰和偏航姿态角,[Θdi=[?di,θdi,ψdi]T]为第[i]个无人机的期望姿态角。
令[e1i=ei,e2i=ei],则
[e1i=e2ie2i=MΘi+WTi-Θd] (27)
根据引理1,设计无人机的控制律为:
[Ti=W-1(-αtanhke1i+le2i-βtanhle2i-MΘi+Θd)] (28)
其中,
[α=α1000α2000α3], [β=β1000β2000β3],
[k=k1000k2000k3], [l=l1000l2000l3]。
由式(30)可实现[e1i→0],[e2i→0],有
[|Ti|≤W-1(α+β-MΘi+max {Θd})] (29)
从而可控制输入的受限,且控制输入的幅度可由[α]和[β]调节。
式(28)系统稳定性的证明如下:
设计Lyapunov函数为
[V=αlncoshke1i+le2i+βlncoshle2i+12ke22i] (30)
对式(30)求导得
[V=αke1i+le2itanhke1i+le2i+βle2itanhle2i-ke2ie2i]
令[t1i=tanhke1i+le2i],[t2i=tanhle2i],则[e2i=-αt1i-βt2i],则上式可写为
[V =-lαt1i+βt2i2-kβe2it2i]
由于[xtanhx=x?x-?-x?x+?-x≥0],从而[V≤0]成立。当且仅当[e2i=e1i=0]时,[V=0]。即当[V≡0]时,[e2i=e1i=0]。根据LaSalle不变性原理,系统式(29)为渐进稳定,即当[t→∞]时,[e1i→0],[e2i→0]。系统的收敛速度取决于[α], [β, k, l]。
4 仿真与分析
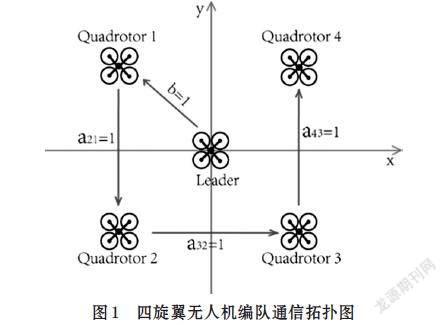
本节对前面推倒的编队控制律进行验证分析,设计无人机编队模型如图1所示,具有1架领航者无人机和4架跟随者无人机。
有向边的权重分别为:[b=1],[a21=a32=a43=1]。图1的拉普拉斯矩阵计算如下:
[L=0000-11000-11000-11]
事先给领航者无人机设计期望的编队轨迹:
[xd=0.3t], [yd=0.3t], [zd=0.3t], and [ψd=0.5]
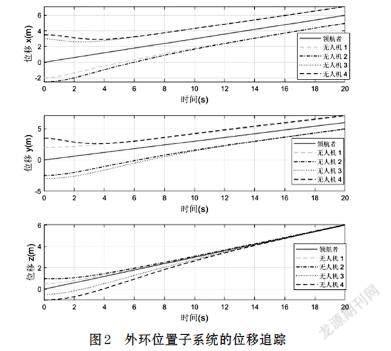
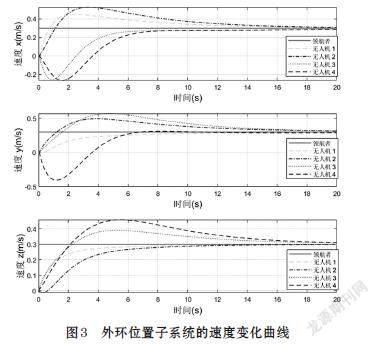
仿真结果如图2~图7。
图2和图3显示了外环子系统的仿真结果,采用LMI方法设计增益K的值,由分析可知,无人机的位移和速度逐渐收敛于期望值,领航者和跟随者、跟随者和跟随者之间达到了期望值。
图4和图5为内环姿态子系统的仿真结果,分析可知,4架跟随者无人机经过一定的时间后,姿态角度与姿态角速度逐渐与领航者无人机保持一致。
图6为四架跟随者无人机外环位置子系统控制律的变化,分析可知,采用上文的LMI方法设计的输入受限的外环控制律,使系统的输入值控制在了[[12.7,13.2]]的范围内,即控制律在有限的范围内浮动,并随着时间的变化系统逐渐趋于稳定。
图7为四架跟随着无人机滚转角的控制律变化,分析可知,采用基于双曲正切的输入受限的内环控制律,使滚转角的输入值控制在了[-0.3,0.32]的范围内,并随着时间的变化系统逐渐趋于稳定。
5 结束语
本文针对输入受限下的四旋翼无人机编队一致性问题,基于图论和一致性理论,设计了基于LMI和双曲正切方法的控制输入受限的分布式编队控制律,采用Lyapunov稳定性理论证明了系统的稳定性,最终实现了多无人机的协同跟踪控制,并在Matlab中仿真验证了所设计的控制律的正确性。结果表明,本文所提的方法可以有效使无人机编队系统趋于稳定,并使系统的控制输入有界。
参考文献(References):
[1] Lim, H, Park, et al. Build Your Own Quadrotor: Open-
Source Projects on Unmanned Aerial Vehicles[J]. IEEE robotics and automation magazine: A publication of the IEEE Robotics and Automation Society,2012
[2] Turpin M, Michael N, Kumar V. Trajectory design and
control for aggressive formation flight with quadrotors[J]. Autonomous Robots,2012,33(1-2):143-156
[3] Jianan, Wang, Ming, et al. Integrated Optimal Formation
Control of Multiple Unmanned Aerial Vehicles[J]. Control Systems Technology,2013,21(5):1731-1744
[4] GosiewskiZ ,Ambroziak L . Formation Flight Control
Scheme for Unmanned Aerial Vehicles[J]. Lecture Notes in Control & Information Sciences,2012,422:331-340
[5] Toru, NAMERIKAWA, Yasuhiro, et al. Formation Control
with Collision Avoidance for a Multi-UAV System Using Decentralized MPC and Consensus-Based Control[J]. Sice Journal of Control Measurement & System Integration,2015
[6] Zou A M, Kumar K D, Ruiter A H J D. Robust attitude
tracking control of spacecraft under control input magnitude and rate saturations[J]. International Journal of Robust and Nonlinear Control,2016,26(4)
[7] Guo Y, Guo J H, Song S M. Backstepping control for
attitude tracking of the spacecraft under input saturation[J]. Acta Astronautica,2017,138(sep.):318-325
