基于遗传算法的应召搜潜路径优化
2023-05-19 08:49寇小明周景军
水下无人系统学报 2023年2期
张 宁,寇小明,李 斌,李 谦,周景军
(中国船舶集团有限公司 第705 研究所,陕西 西安,710077)
0 引言
水面舰艇编队作战是目前海上作战的主要形式[1]。编队作战时由于编队目标庞大,易被敌方潜艇发现和伏击,因此,提升编队在实航阶段的搜潜能力至关重要。编队搜潜可以通过舰载机、舰载无人水下航行器(unmanned undersea vehicle,UUV)和舰载声呐来完成。现代舰艇虽普遍搭载有反潜直升机,但在实航阶段,舰载直升机存在航程近、携带声呐浮标有限、吊放声呐探测能力不足、留空时间短及战斗行动受海况影响大等缺陷[2]。而舰载UUV 由于自身空间狭小,携带能源有限,航速较慢,存在探测范围小、一次性使用、消耗大的缺点。因此,实航编队搜潜主要依赖舰载声呐来实现。舰载声呐主要包括舰壳声呐和拖曳声呐,舰壳声呐主要用于搜索和警戒,拖曳声呐主要用于警戒。在搜潜过程中,拖曳声呐收放复杂、费时,在使用中会影响舰艇机动,舰艇难以停车和倒车[2]。因此,研究舰艇编队使用舰壳声呐对敌潜艇搜索具有重要意义。
编队应召反潜搜索是编队反潜搜索的一种常见形式,是指在某一时刻由预置声呐设备或其他手段知悉概略位置上存在过潜艇的活动,但由于潜艇的机动性,潜艇的当前位置存在一定的分布,需要指派兵力前往目标海域进行搜索定位的过程[3]。搜索编队常由2 艘及以上舰艇组成,通常采用平行法和拓展法对目标丢失海域进行搜索。平行搜索法是指编队收到潜艇最后消失的位置信息后,组成平行运动队形,全速到达开始搜索线,对目标海域进行直线搜索[4]。平行搜索由于未考虑潜艇可能存在的机动状态,发现概率较低[5]。
拓展法指编队得到潜艇消失信息并到达目标海域后,以螺旋线形轨迹对海域进行搜索的方法[6]。目前,国内外针对拓展法搜潜的理论研究较有成效[7]。在对搜索过程建模与路径优化中,包括传统螺旋线形、基于遗传算法的螺旋线形以及各种改进的智能优化算法均有一定的研究。但这些研究成果大多忽略了搜索过程中信息来源的置信度。
文中改进了舰船搜潜的发现概率模型,引入信息置信度要素,利用遗传算法分别优化每段航向角和速度,计算了单、双舰在仅改变每段航向角和既改变每段航向角又改变速度的条件下,单、双舰各段的航向角和速度,并与传统螺旋搜索方式作对比,分析了不同条件对目标发现概率的影响,最终给出了实航条件下单、双舰的最优路径仿真,为水面舰艇搜攻潜提供战术参考。
1 模型建立
1.1 声呐探测模型
舰壳声呐搜潜是利用舰艏装备的声呐基阵按照一定的顺序在设定的扇面内沿着不同的舷角逐次发射和接收声波,以探测声呐作用范围内的目标的过程[8]。
实际情况下,舰壳声呐的工作范围存在盲区,简化后的二维平面声呐探测范围如图1 所示[9]。舰艇声呐的实际探测能力用有效搜索宽度近似表示为
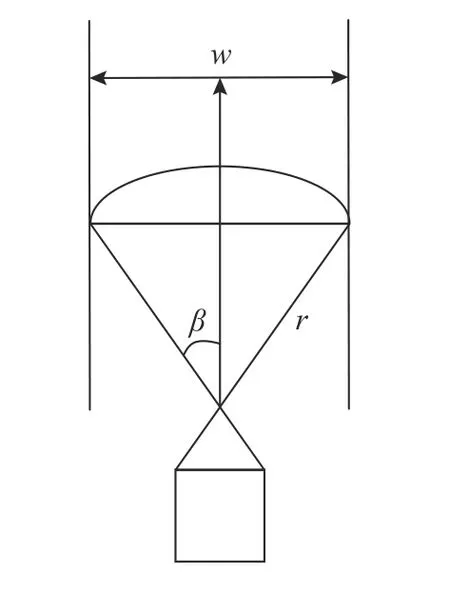
图1 声呐探测范围示意图Fig.1 Schematic diagram of sonar detection range
式中:r为声呐的最大探测距离;β为声呐的单舷搜索扇面角。
舰船在搜索阶段使用声呐来探测水下目标,每探测一次的时间间隔为ΔtD。当目标在声呐的工作范围内,表示声呐能成功探测到,其概率为1,否则为0。搜索过程中能探测到目标时的位置需要满足下式
式中:Xi为舰船的x轴坐标;Yi为舰船的y轴坐标;xi为敌潜艇目标的x轴坐标;yi为敌潜艇目标的y轴坐标。
1.2 敌潜艇目标运动模型
舰艇应召搜索过程中,潜艇在未发现舰艇威胁时,一般仍保持原来运动状态航行。潜艇以最后消失时刻T0开始,以最后消失的位置TS为起点,作航向服从[0,2π]上均匀分布、速度服从正态分布的匀速直线运动[3]。通过仿真可模拟目标位置分布随时间的变化情况。
1.3 舰船搜索运动模型
考虑到舰船的实际机动能力,模型化舰船在搜索过程中的整体运动模式。该过程中,舰船可在一定的时间内保持稳定的航速和航向,每隔一段时间进行调整[9]。其中,稳定的航速和航向的运动过程可视为一个阶段,因此,一个完整的舰船搜索路径可用各段航向角 θi、各段航速vi、各段运动时间Stepts以及搜索总时长T来表示。舰船搜索过程示意图如图2 所示。
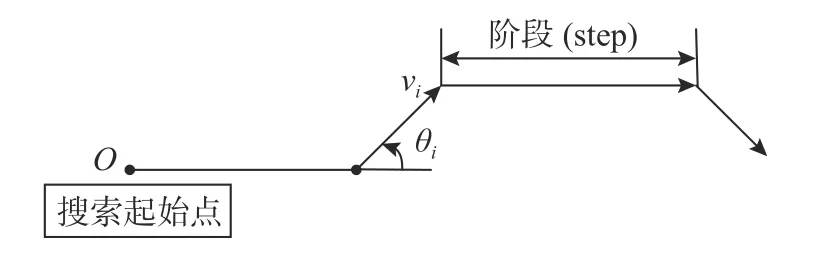
图2 舰船搜索过程示意图Fig.2 Schematic diagram of ship search process
2 搜索路径累积探测概率
文中利用累积探测概率(cumulative detection probability,CDP)来评价搜索者路径的搜索效能[10]。对于任意的一个搜索方案ξ,搜索时长t内搜索者的CDP 记为ECDP(ξ,t)。由于多次仿真的目标分布是随机的,因此,在计算搜索路径的CDP 时可用蒙特卡洛方法[11]来近似,其计算公式如下
式中:NT表示敌潜艇目标仿真的总次数;ND(t)表示舰船探测到的敌潜艇目标的仿真次数。
3 信息置信度
文中引入信息置信度Q来表示所获得目标的各种信息,如方位、航向和航速等参数的置信度[12]。Q取值范围是(0,1),当Q无穷趋于0 时,表示信息质量极差;当Q无穷趋于1 时,表示信息质量极高。
反潜作战过程中,当我搜索兵力获取敌潜艇信息后,就会对敌潜艇进行初步定位。这时候如果关于敌潜艇方位、航向和航速的信息质量很高,我搜索兵力就可以直接向预期相遇点机动。文中由于敌潜艇航向服从均匀分布,因而信息置信度Q主要作用于敌潜艇的最后消失点方位以及航速参数上。引入信息置信度的参数变化如表1 所示。
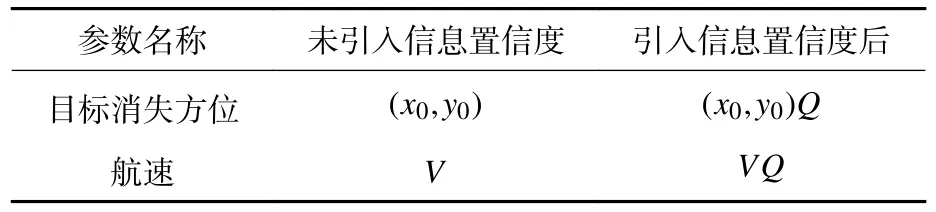
表1 引入信息置信度参数变化Table 1 Parameter changes of introduced information confidence
4 基于遗传算法的最优路径
为达到优化搜索路径使得发现概率最大的目标,需求解各段最优航向角和速度。遗传算法[13]基于生物进化原理,在对各分段最优速度和航向角的求解中有较好表现。遗传算法的模拟过程具体来说就是基因重组与进化,它将需要解决问题的参数编成编码(如二进制码),一个染色体(个体)由多个基因组成,多个染色体之间先进行自然选择,其次相互配对交叉和变异,多次重复计算迭代(即世代遗传)后,就得到最终的优化结果。文中在计算螺旋搜索过程中的每段航向角及每段速度时,利用遗传算法得到发现概率最大的最优航向角和最优速度,以此得到搜潜的最优路径。
遗传算法流程图如图3 所示。

图3 遗传算法流程图Fig.3 Flow chart of genetic algorithm
1)编码:将表现型(解空间的解数据)映射到基因型的过程称做编码。将表现型转换为遗传空间的基因型串结构数据之后再进行搜索操作,这些串结构数据的多种组合方式就构成了多个点。
2)初始种群的生成:初始群体由系统随机产生的N个初始串数据构成。遗传算法的迭代就以这个初始种群作为起始点。设置进化代数计数器g=0;设置最大进化代数G=200;随机生成M=500个个体作为初始群体P(0)。
3)适应度值评价准则:适应度函数用来判定个体或解的优劣性。在仅改变各段航向角时的适应度函数为
既改变各段航向角又改变速度的适应度函数也取搜索路径的发现概率
4)选择:根据适应度值执行选择操作。
5)交叉:按照交叉概率执行交叉操作。
6)变异:按照变异概率执行变异操作。
群体P(g)经过步骤4)~6)后可产生群体P(g+1)。
7)终止条件:若g≤G,则g=g+1,跳转至步骤3);若g>G,则终止运算,输出步骤3)中具备最大适应度值的个体。
按照上述步骤,在对敌潜艇搜索过程中不断优化舰船的每段航向角和速度,求解最优搜索路径。
5 仿真与分析
5.1 单舰搜索路径轨迹仿真
假设t=0时,在(100,100)n mile 坐标处探测到1 个水下潜艇目标浮出水面又潜入水下离开出水点。目标的速度V大小服从正态分布N(7,1),航向θ服从[0,2π]上的均匀分布,通过对目标的1 000 次仿真,可得潜艇目标的分布如图4 所示。图中,TS表示目标最后消失点,绿色的散点代表目标航行3 h 时可能存在的位置分布,黑色的散点代表目标航行10 h 时可能存在的位置分布。
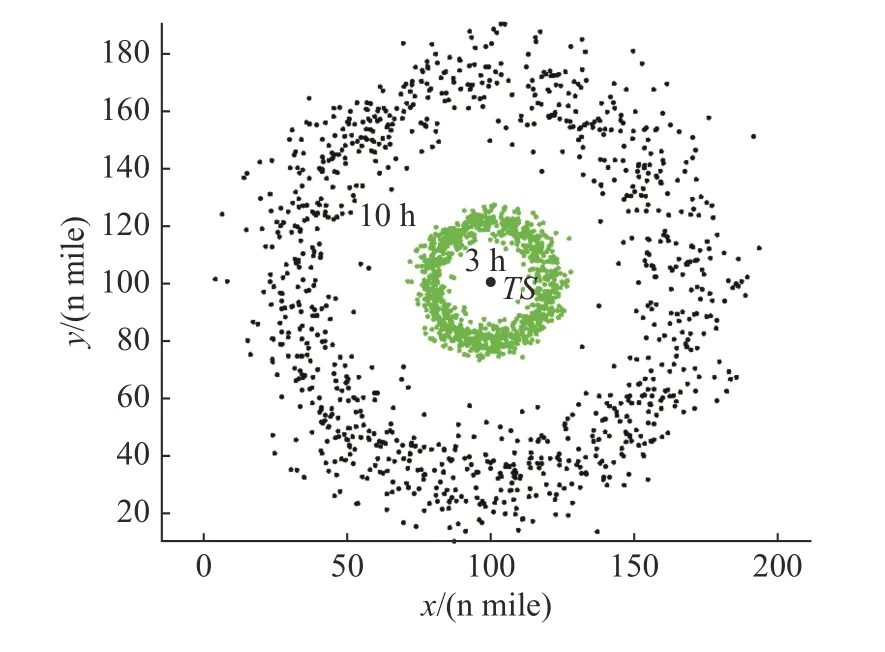
图4 目标分布图Fig.4 Target distribution
设置声呐最大探测距离为9.72 n mile,舰船搜索速度为18 kn,航行速度为20 kn,声呐每隔0.2 h探测一次,每隔1 h 改变一次舰船搜索的方向或速度,搜索时长共15 h。信息置信度由于受我方舰艇接收到敌潜艇方位和航速信息的准确度影响,是一个变化的值,因此仿真时,依据文献[12]可设置信息置信度为典型值Q=0.8,遗传算法的初始种群数设置为500,进化代数设置为200。单舰的起始探测点为舰船初始运动方向与假设潜艇与之相向而行的相遇点,如图5 所示,其中R为舰船起始点到起始探测点的距离。
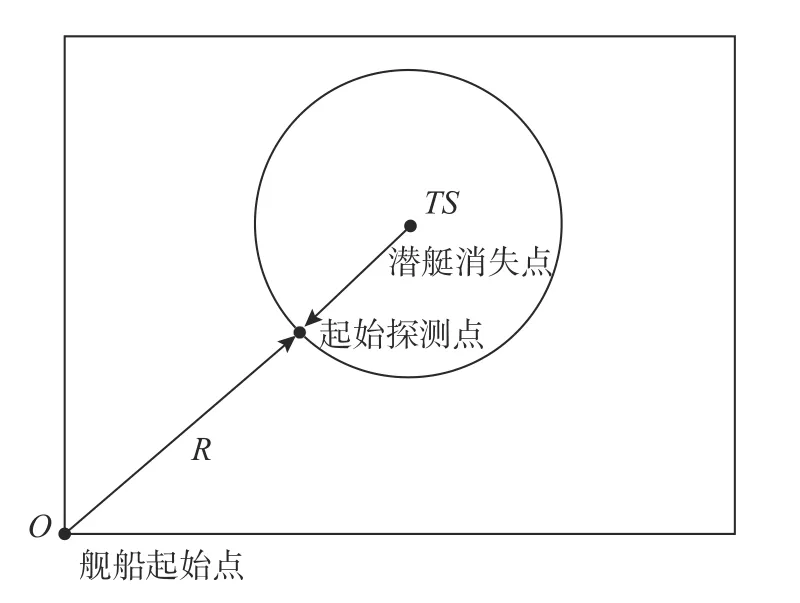
图5 单舰起始探测点示意图Fig.5 Schematic diagram of initial detection point of single ship
在仅改变各段航向角的情况下,仿真100 次后的单舰搜索目标轨迹如图6 所示。
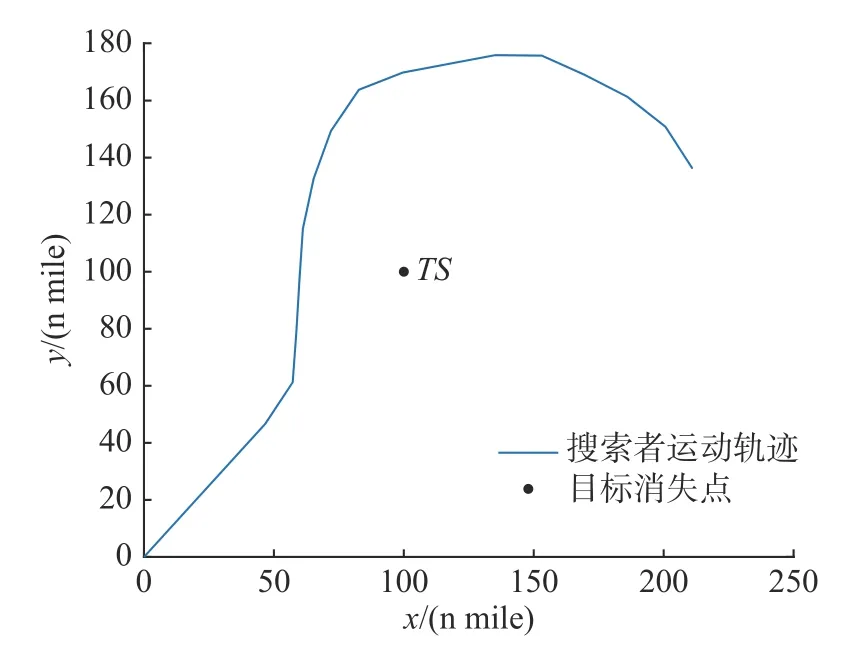
图6 单舰仅改变航向角的搜索路径Fig.6 Search path of single ship only changing heading angle
单舰仅改变航向角的搜索过程中,优化后的各段航向角如表2 所示。
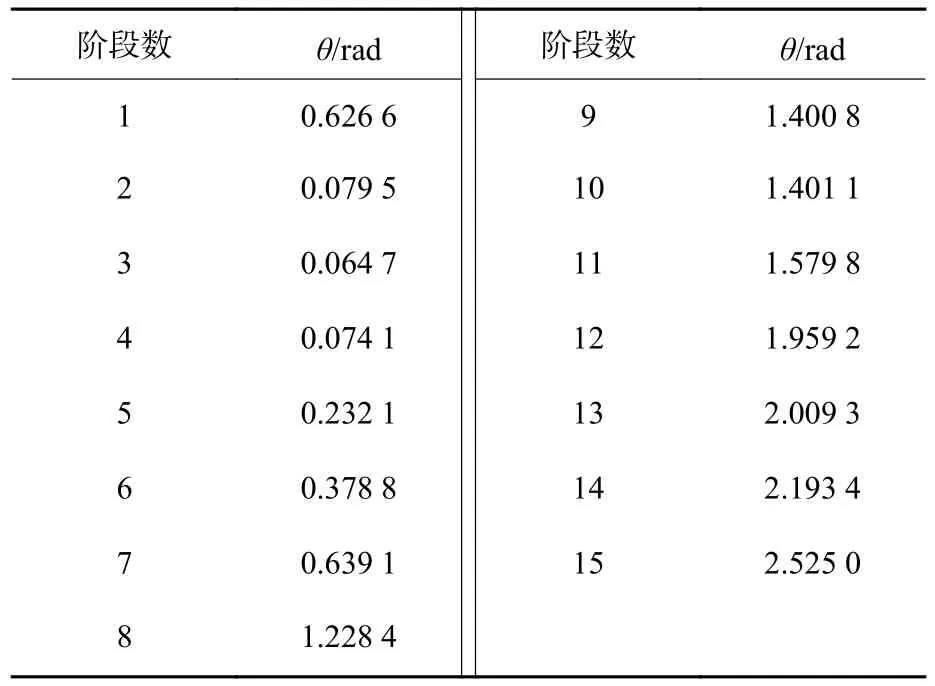
表2 单舰仅改变航向角参数值Table 2 Parameter values of single ship only changing heading angle
仿真结果表明,单舰仅改变各段航向角对潜艇目标的发现概率是69.8%。
各段既改变航向角又改变速度的情况下,仿真100 次后的单舰搜索目标轨迹如图7 所示。
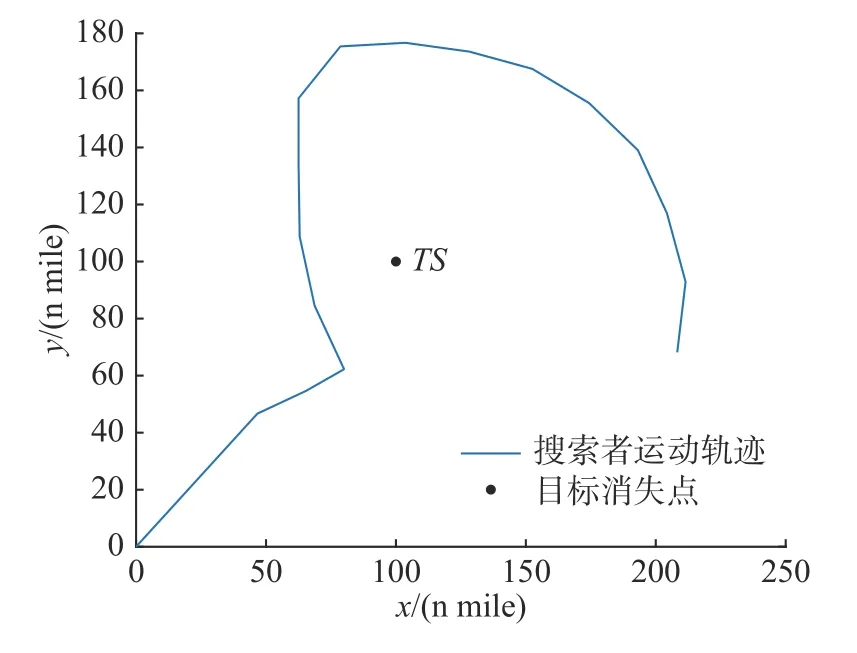
图7 单舰改变各段航向角和各段速度的搜索路径Fig.7 Search path of single ship changing heading angle and speed of each section
单舰既改变航向角又改变速度的搜索过程中,优化后的各段速度和航向角如表3 所示。
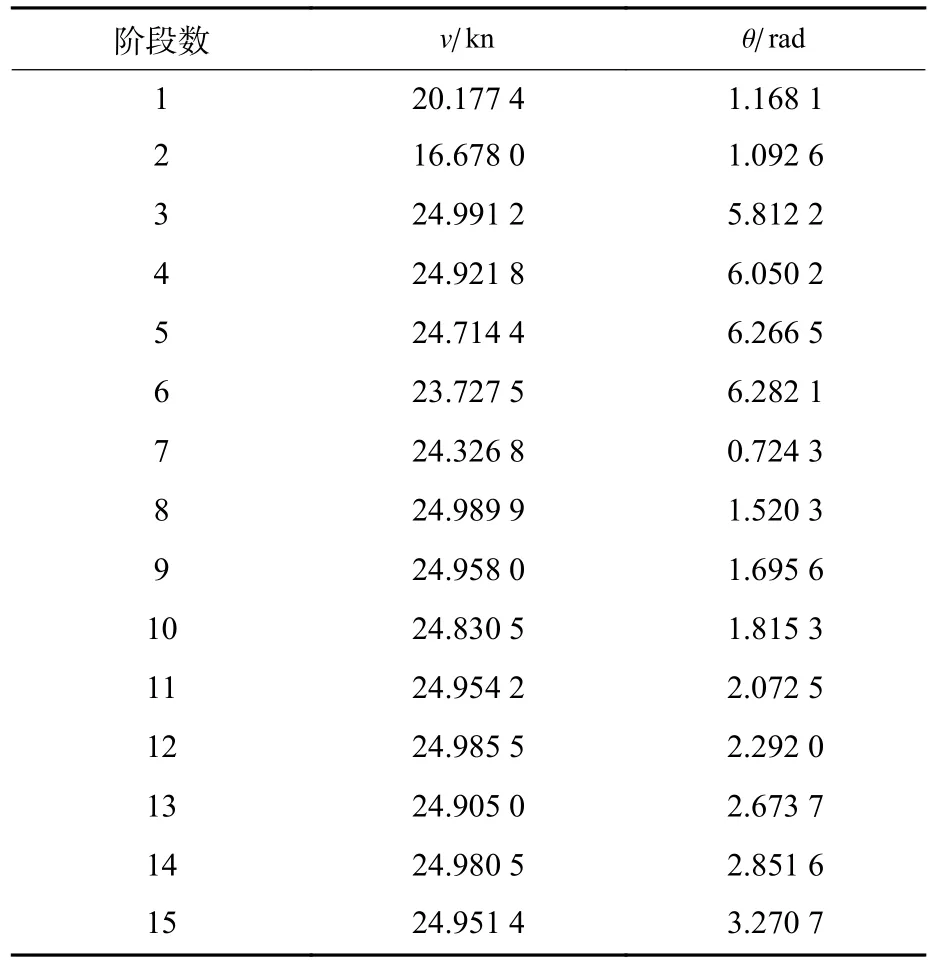
表3 单舰改变各段速度和航向角参数值Table 3 Parameter values of changing speed and heading angle of each section of a single ship
仿真结果表明,单舰改变各段航向角和各段速度对目标的发现概率是79.2%。
为了验证利用遗传算法优化单舰航向角和速度的优越性,对敌潜艇目标直航规避分别进行了多次仿真试验,并与传统的螺旋算法进行比较,比较结果如表4 所示,单舰传统螺旋线搜索路径如图8 所示。
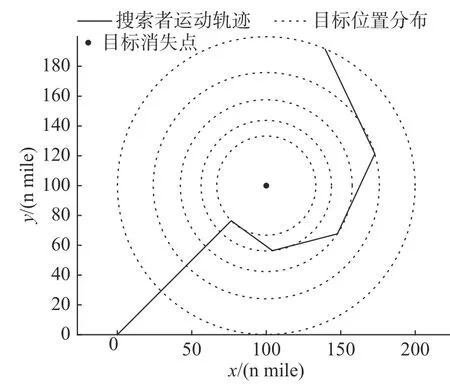
图8 单舰传统螺旋线搜索路径Fig.8 Single ship traditional spiral search path
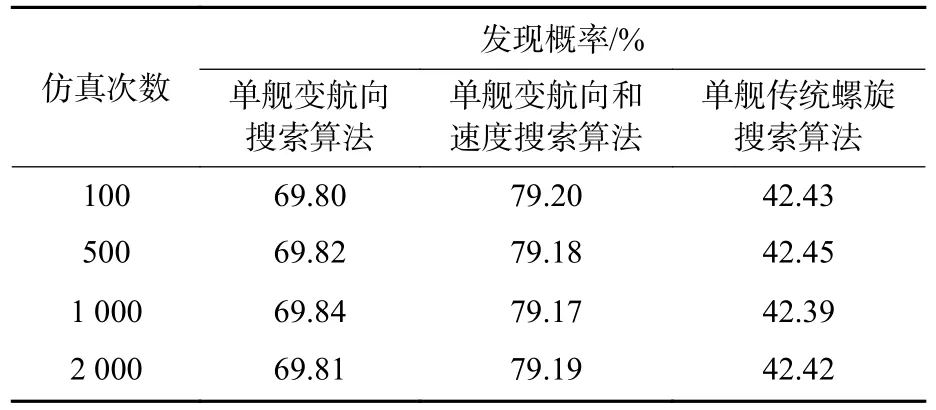
表4 单舰不同搜索算法的发现概率对比Table 4 Comparison of discovery probability of different search algorithms for single ship
通过单舰仅改变各段航向角和既改变各段航向角又改变速度的搜索路径图可知,同时改变航向角和速度的搜索轨迹路径图在包裹目标消失点的范围上比单舰仅改变各段航向角的包裹目标消失点的范围更大,更趋近于理论上的螺旋线形,这是由于各段改变速度之后,舰船的搜索机制更为灵活,可以用更为合适的速度去贴近目标可能出现的位置,提高了对敌潜艇的发现概率。此外,由单舰不同搜索算法的发现概率比较可知,文中提出的单舰搜索算法优于传统螺旋算法,较好地提高了单舰搜索的发现概率。在战术运用层面,可以考虑用这种方式来提高作战效能。
5.2 双舰编队搜索路径轨迹仿真
双舰的第一搜索点较单舰有所不同,双舰分别沿着起始运动点O和目标消失点TS连线左右对称分布。两艘舰先以密集队形经过集结阶段,形成单横队队形经过航渡阶段,最后到达起始探测点位置开始搜索。双舰搜索的运动过程如图9 所示。

图9 双舰搜索示意图Fig.9 Schematic diagram of double ships search
在仅改变各段航向角的情况下,仿真100 次后的双舰搜索目标轨迹如图10 所示。
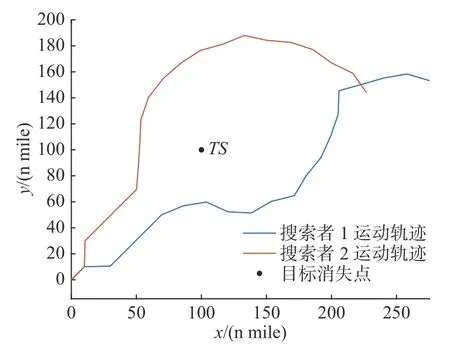
图10 双舰仅改变航向角的搜索路径Fig.10 Search path of double ships only changing heading angle
双舰仅改变航向角的搜索过程中,各阶段航向角如表5 所示。
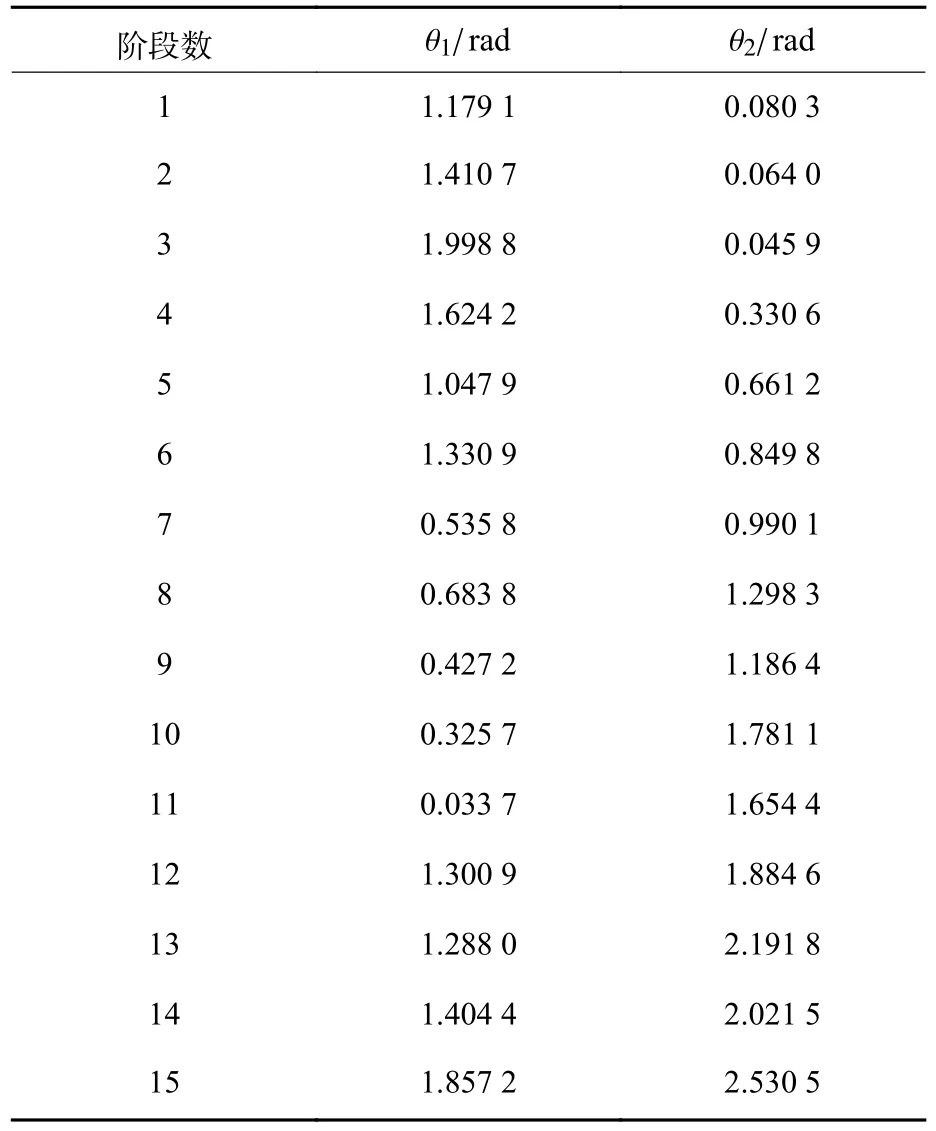
表5 双舰仅改变航向角参数值Table 5 Parameter values of only changing heading angle of double ships
仿真结果表明,双舰仅改变航向角对潜艇目标的发现概率是87%。
双舰既改变航向角又改变速度的情况下,仿真100 次后的双舰搜索目标轨迹如图11 所示。
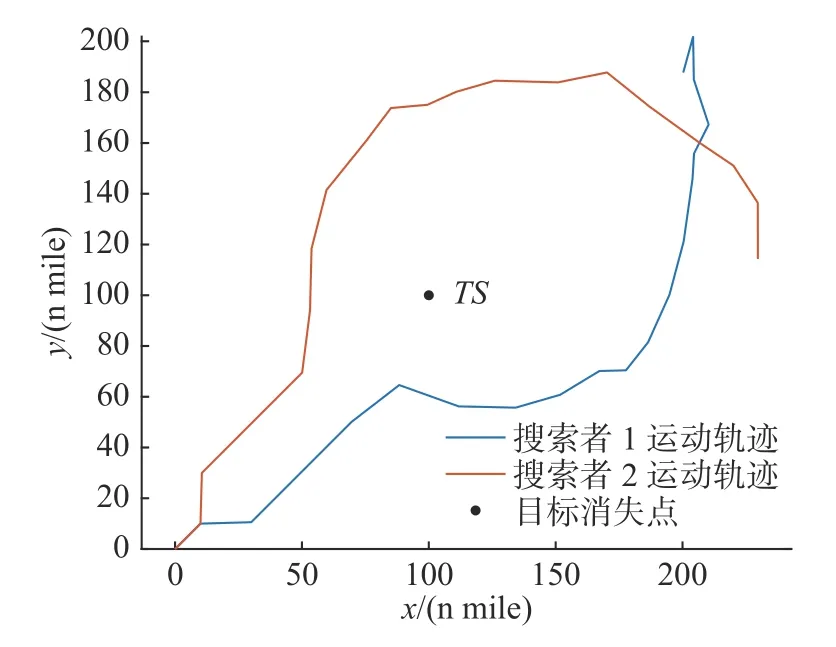
图11 双舰改变各段航向角和各段速度的搜索路径Fig.11 Search path of double ships changing heading angle and speed of each section
双舰既改变航向角又改变速度的搜索过程中,各段速度和航向角如表6 所示。
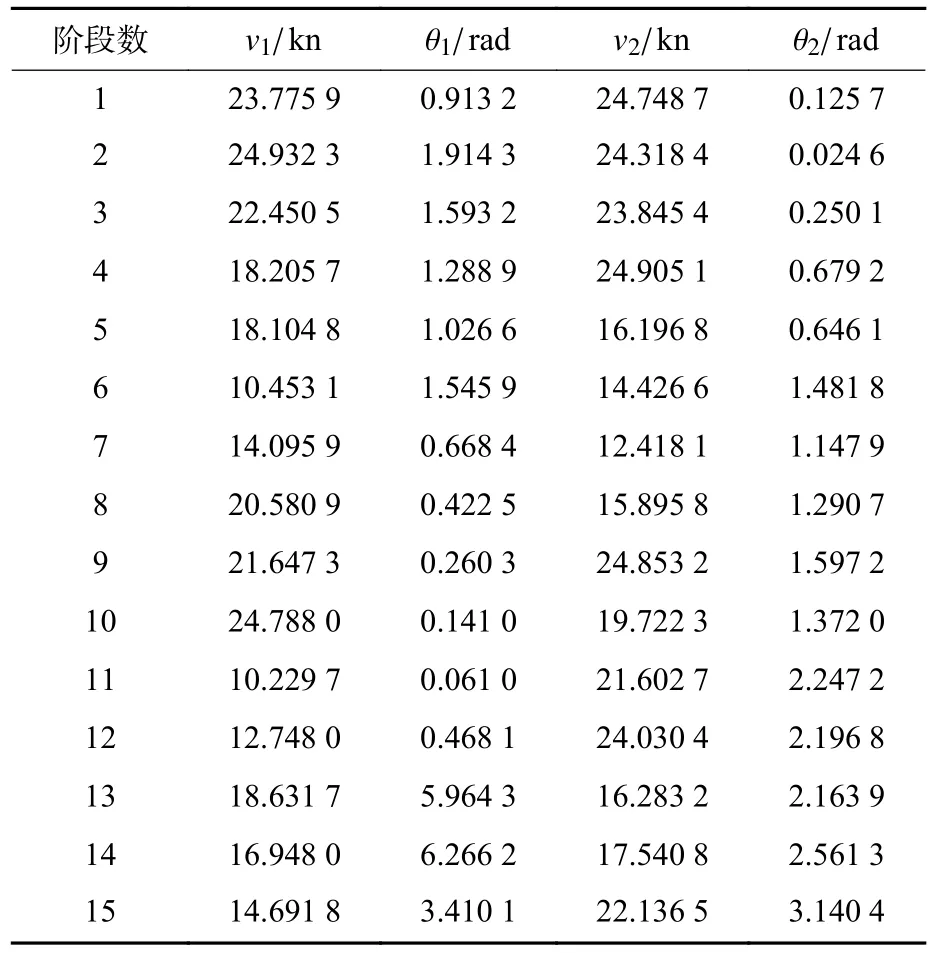
表6 双舰改变各段速度和各段航向角参数值Table 6 Parameter values of heading angle and speed of each section changed by double ships
仿真结果表明,双舰既改变航向角又改变速度对潜艇目标的发现概率是95%。
双舰单独搜索是指两舰各自独立执行搜索任务,不存在协同,由概率论可知,两舰对敌潜艇搜索事件独立,其发现概率的计算公式为
式中:pt表示两舰对敌潜艇发现总概率;pa和pb分别表示两舰各自对敌潜艇的发现概率。
将双舰编队搜索与双舰传统螺旋线搜索以及双舰单独搜索进行比较,不同仿真次数情况下的发现概率对比如表7 所示。其中,双舰传统螺旋线搜索路径图如图12 所示。
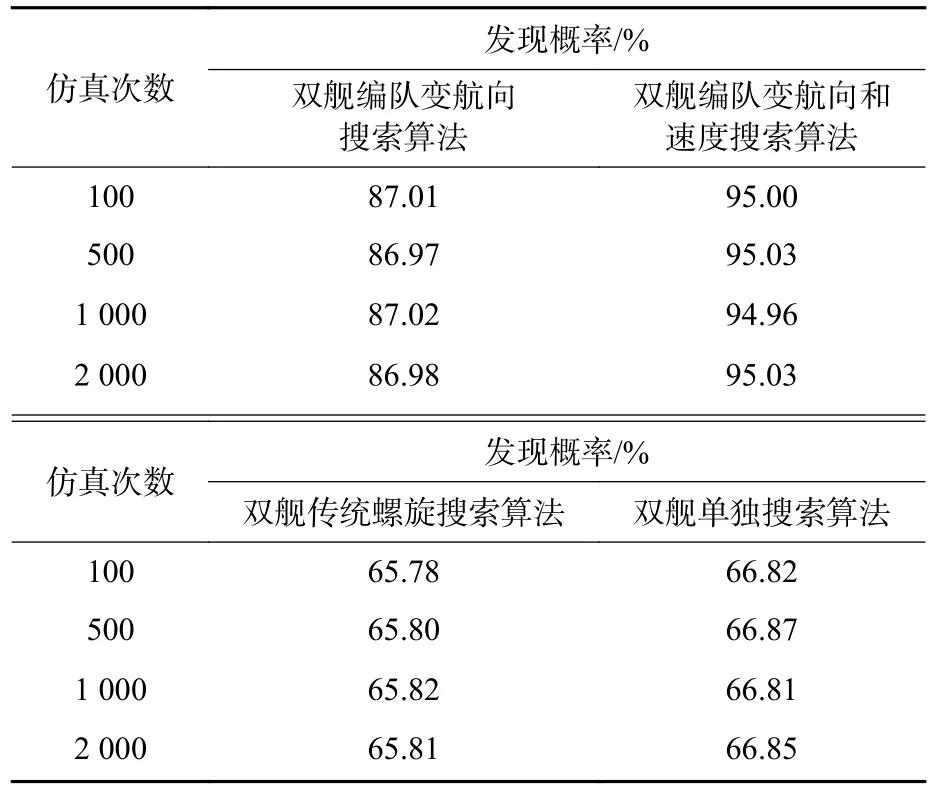
表7 双舰不同搜索算法的发现概率对比Table 7 Comparison of discovery probability of different search algorithms for double ships
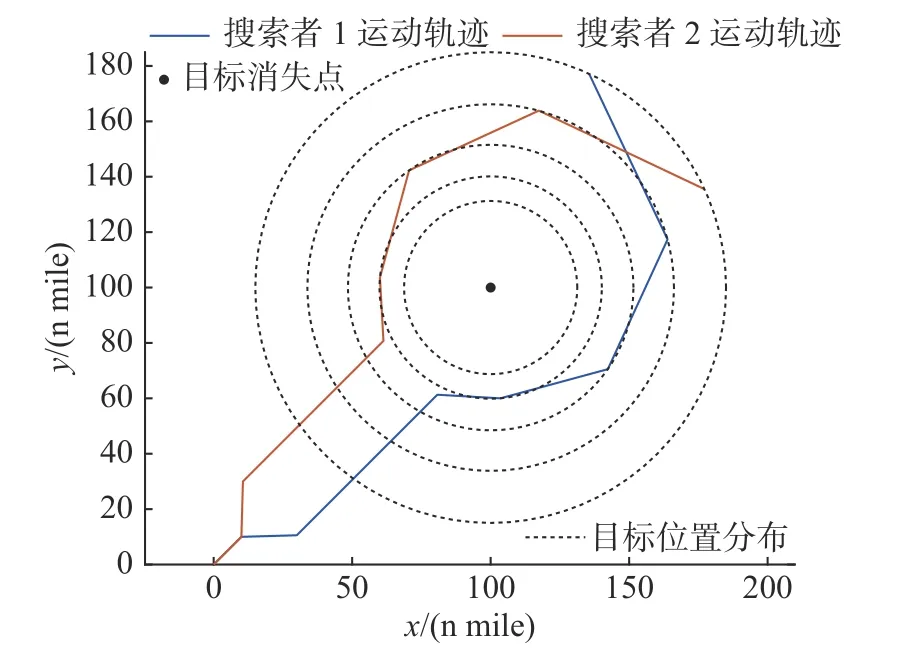
图12 双舰传统螺旋线搜索路径Fig.12 Double ships traditional spiral search path
通过双舰仅改变各段航向角和双舰既改变各段航向角又改变速度的搜索路径图可知,双舰既改变各段航向角又改变速度的搜索路径较双舰仅改变各段航向角的搜索路径包围的潜艇目标最后消失点的区域更大,并且对潜艇目标的发现概率更高。这表明增加速度的变化能够给编队搜索效能带来增益,但这种方式存在风险,随着舰船速度的改变,底噪声特性由于受到声传播特性的影响会发生改变,给声呐信号处理增加难度,从而影响整个搜索过程,相关研究不再赘述。在对潜艇目标的发现概率上,双舰编队的2 种搜索方式较单舰的2 种方式分别提高了17%和16%,所以,增加搜潜兵力能够使得搜潜更加高效;双舰编队的2 种搜索方式对比双舰的单独搜索,对敌潜艇的发现概率分别增长了21%和30%,这证明了采用双舰的编队搜索能够显著提高搜潜概率,同时,对航向和速度的动态改变相较于传统的螺旋线搜索算法使得发现概率的结果更优。因此,在搜索兵力足够的情况下,应尽量选择运用编队灵活高效地搜索敌潜艇。
6 结束语
文中使用引入了信息置信度的探测概率公式来计算舰船搜潜的各段航向角及速度,利用了遗传算法对敌潜艇的发现概率进行优化,仿真得到了不同情况下单舰、双舰搜潜的最优路径轨迹及发现概率。仿真结果表明,该算法较传统的螺旋线搜索算法显著提高了对敌潜艇的发现概率,无论单舰或者双舰,既改变各段航向角又改变速度的发现概率优于仅改变各段航向角的发现概率;双舰编队的发现概率优于单舰发现概率;同时,双舰编队搜索的发现概率要高于双舰单独搜索,编队作战优势明显。研究过程中引入信息置信度要素提高了模型的可信度,研究结果可为实际搜攻潜战术运用提供参考。
猜你喜欢
军事文摘(2023年5期)2023-03-27
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
新世纪智能(高一语文)(2021年3期)2021-07-16
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年24期)2017-02-02
海军航空大学学报(2015年4期)2015-02-27
法大研究生(2015年2期)2015-02-27