基于浅海声强干涉的双水听器运动声源速度估计
2023-05-19 08:49刘雄厚
水下无人系统学报 2023年2期
姚 远 ,孙 超 ,谢 磊 ,刘雄厚
(1.西北工业大学 航海学院,陕西 西安,710072;2.陕西省水下信息技术重点实验室,陕西 西安,710072)
0 引言
运动声源速度估计是水声学的重要研究课题之一,在目标定位、跟踪以及辨识等方面有着重要的研究价值与意义。以往多采用大孔径基阵[1-2]进行运动声源速度估计,但存在布放难、造价高以及阵型失配等问题。单水听器具有布放简便、成本低等优点,非常适合在小平台探测模块上使用。因此,基于单水听器的运动声源速度估计是一个重要的研究方向。
现有的单水听器测速方法大体分为多普勒类、声压互谱类和干涉特性类等。基于多普勒特性的测速方法主要利用线谱噪声产生的多普勒频移测速,首先提取时频分布中线谱噪声的瞬时频率,再利用瞬时频率与声源运动速度间的函数关系估计出声源速度[3-5]。基于声压互谱类的测速方法主要利用运动声源相对水听器径向运动信息实现声源速度估计[6-7]。第一类方法在声源高速运动且线谱频率较高时测速结果较为准确,而水下声源在巡航工况时往往处于低航速运动状态;第二类方法需要对声源径向运动速度随时间的变化趋势进行长时间拟合测速。
基于干涉特性的测速方法主要利用声源激发各阶简正波之间的干涉效应实现声源测速。研究人员利用运动声源辐射噪声低频分析记录(low frequency analysis and recording,LOFAR)谱中表现出的明暗相间的连续谱条纹状干涉图样,开展了一系列声源测速研究[8-9],不过理论模型都是基于对声场贡献最大的前4 条声线简化而来的。与单水听器相比,双水听器同样具有布放简便、成本低等优点,并且增加了水听器之间相对距离这一先验信息。有学者对时间频率域干涉条纹图进行Hough 变换,提取出声源运动参数,通过构建双水听器的距离与声源运动参数之间的空间关系,实现了声源测速[10-12]。然而,在一些场景下,运动声源辐射噪声LOFAR 谱中宽带连续谱干涉条纹非常微弱,上述测速方法难以应用。而由于声源辐射噪声中线谱成分比连续谱成分平均高10~20 dB[13],相较连续谱而言,能量高的线谱更易观测。
已有研究主要是将辐射噪声线谱声强干涉起伏看作是对距离频率域干涉谱在特定频率上的调制,即它的起伏对应干涉谱条纹的亮暗,再通过构建两频率线谱声强干涉起伏相似度代价函数,实现声源距离和波导不变量参数估计[14-16]。目前尚未见到有关利用线谱声强干涉起伏实现声源运动速度估计方面的报道。文中基于双水听器利用线谱声强干涉起伏分别获得相对1 号水听器和2 号水听器的声源运动参数,再结合声源与双水听器之间的距离位置关系,解算出声源运动速度。其中正确的声源运动参数是时间维声强经过插值变换后的不同频率线谱声强干涉起伏满足正比关系的必要条件。因此,通过在一定区间范围内进行参数搜索,构建不同频率线谱声强干涉起伏间的相关系数代价函数,获得声源最近通过时间和距速比参数,结合声源与双水听器距离位置关系,可以实现声源速度估计。文中方法不受声源运动速度约束,适合在小平台探测模块上使用,对背景噪声下低速运动声源有较好的测速效果。
1 声源相对水听器运动模型
匀速直线运动声源相对水听器的运动示意图如图1 所示。声源运动到最近通过位置(the closest position of approach,CPA)处的时刻称为最近通过时间,记为tCPA,CPA 处的声源与水听器之间的距离称为最近通过距离,记为rCPA。

图1 声源相对水听器的运动示意图Fig.1 Illustration of relative position between hydrophone and moving source
在t时刻运动声源与水听器间的位置关系满足
式中,v0表示声源运动速度。
当声源依次通过双水听器,相对1 号水听器和2 号水听器的最近通过时间分别记为tCPA1和tCPA2,相对1 号水听器和2 号水听器的最近通过距离分别记为rCPA1和rCPA2。声源运动轨迹与双水听器之间的位置关系如图2 所示。

图2 声源运动轨迹与双水听器之间的位置关系示意图Fig.2 Illustration of relative position between dual hydrophones and moving source trajectory
双水听器的水平间距可以表示为
进一步化简,有
式中,b1=rCPA1/v0,b2=rCPA2/v0,分别表示声源分别相对1 号和2 号水听器的最近通过距离与速度之比,简称为距速比。可见,只要估计出声源相对双水听器的声源运动参数tCPA1、tCPA2以及b1和b2,便能计算出声源运动速度v0。下文将给出利用线谱声强干涉起伏估计声源运动参数具体过程。
2 浅海波导声源速度估计
2.1 接收信号模型
以自身旋转部件的机械噪声和螺旋桨推进噪声为主的噪声源可建模为K个低频线谱分量的叠加[16]
式中:k为线谱分量的号数;Ak和 ωk分别为第k个线谱的幅度和角频率;ϕk为线谱的相位。
由于声源特性以及传播过程引起的幅度起伏,一般声源线谱幅度具有起伏性。文中主要关注声源与接收器传播距离变化引起的幅度起伏,暂不考虑声源起伏,即假设声源在线谱频率处辐射能量稳定。
根据简正波理论,波导中位于r0=(0,zs)的远场声源到接收器(r,zr)的信道传递函数G(r,ω)可表示为[17]
式中:krm为第m阶简正波的水平波数;Ψm为第m阶简正波的模态深度函数;Bm为声压的幅度项。
水听器接收信号频谱表示为
式中,S(ω)为声源s(t)的频谱。
2.2 线谱声强干涉起伏
定义第k个线谱声强为[17]
式中,Δkmn为第m阶与第n阶简正波的水平波数差,即Δkmn=krm-krn。
式(7)省略了随着距离和频率慢变的非相干项,保留了简正波两两干涉叠加的相干项,该项决定了线谱声强干涉起伏[18]。通常在多号简正波频散特性非常一致的浅海波导中,波导不变量与相互干涉的简正波号数m,n无关,根据文献[17],宽带连续谱辐射噪声的接收信号声强在距离-频率平面上的恒定强度条纹轨迹满足
式中:r0和 ω0分别表示参考距离和参考频率;β表示波导不变量。轨迹上任意两频率 ω1和ω2处声强I1(r1)和I2(r2)满足如下关系[19]
式中:A1和A2分别为频率 ω1和ω2处声源线谱频谱幅度;r2=r1(ω2/ω1)1/β,r1和r2为轨迹上两频率点声强对应的距离。
由图1 可知,由于运动声源靠近CPA 的过程中,声源与水听器之间的距离r相对时间t是非线性变化的。水听器接收信号声强干涉起伏Ik在时间维度t是均匀采样的,而对应的距离维度是非均匀的,其不同频率之间的线谱声强干涉起伏I1和I2满足式(9)。对于随时间变化的线谱声强干涉起伏,可以通过对式(1)两端同时除以v0得到,即
依据式(10)对t时间域进行重采样,并对声强Ik(t)进行插值变换,得到在t′时间域均匀采样的声强(t′),从而满足类似式(9)的关系。根据式(9)和式(10),重采样后时间域的不同频率线谱声强干涉起伏之间满足[20]
2.3 声源运动速度估计
综上,利用双水听器获得的声源运动参数估计结果及声源与双水听器之间的距离位置关系,从而实现声源速度估计,基本处理流程如图3 所示。
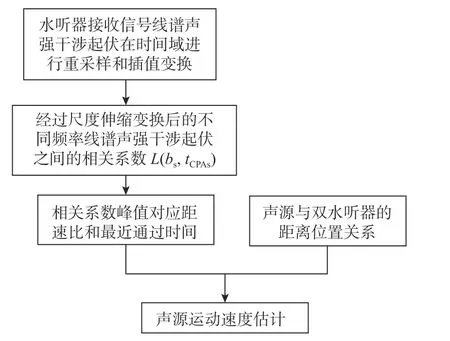
图3 声源速度估计的基本处理流程Fig.3 Basic flowchart of acoustic source velocity estimation
3 数值实验与分析
文中通过数值仿真验证基于双水听器利用多线谱声强干涉起伏实现声源速度估计方法的有效性。仿真使用波导环境为浅海等声速波导环境,水深为40 m,水体声速为1 500 m/s,半空间海底声速为1 750 m/s,密度为1 750 kg/m3,吸收系数为0.2 dB/λ,λ 表示波长。波导环境参数如图4 所示。数值仿真利用Kraken 声场仿真软件。
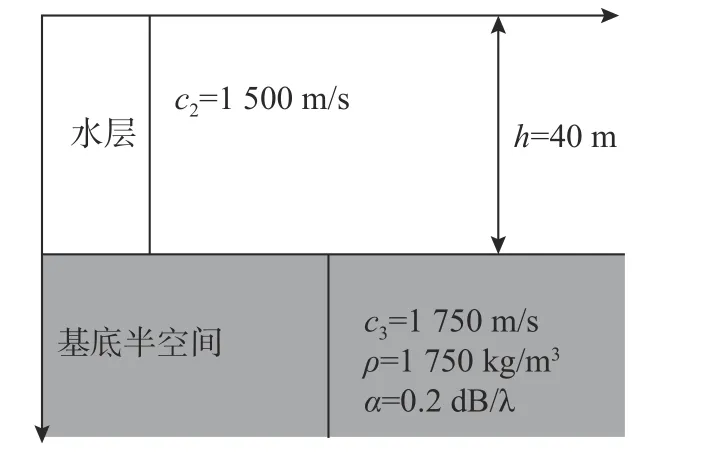
图4 波导环境参数Fig.4 Waveguide environment parameters
3.1 数值仿真
双水听器水平间距为1 000 m。声源以速度2 m/s 作匀速直线运动,运动时间区间为0~1 800 s,采样间隔为1 s。声源在第1 号水听器CPA 处的时刻为950 s,该时刻与第1 号水听器的最近通过距离为800 m;声源在第2 号水听器CPA 处的时刻为1 350 s,该时刻与第2 号水听器的最近通过距离为1 400 m。声源线谱频率分别为300 Hz 和350 Hz。声源深度为10 m,水听器深度为35 m。波导以反射类简正波为主,波导不变量视作1。
第1 号水听器接收信号的信噪比(signal-tonoise ratio,SNR)设为0 dB,由于运动声源辐射噪声LOFAR 谱中线谱成分相较连续谱成分能量要高,这里将300 Hz 和350 Hz 线谱声强提高15 dB作为已知线谱声强起伏,水听器接收信号的LOFAR谱如图5 所示。SNR 定义为带宽内信号功率与高斯白噪声功率的比值。
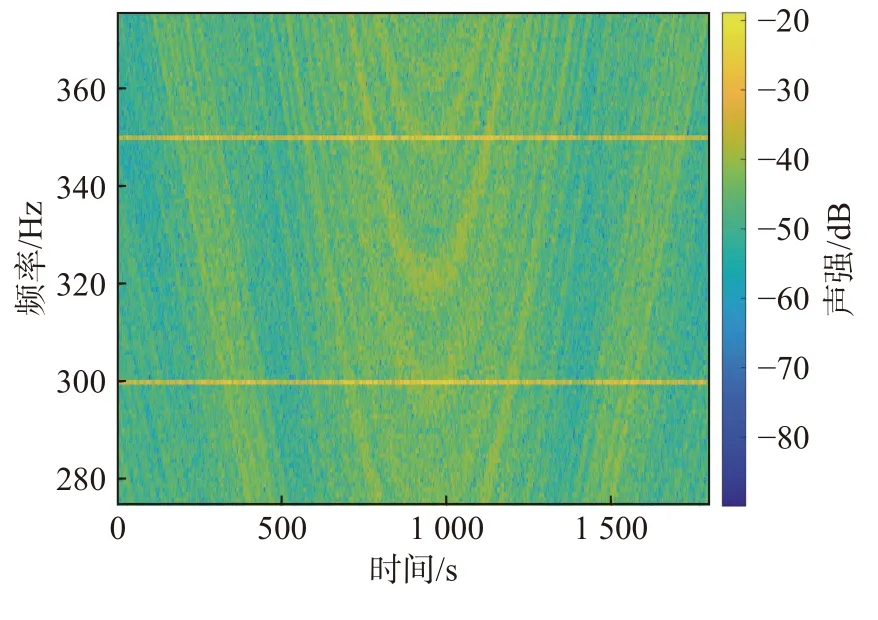
图5 第1 号水听器接收信号的LOFAR 谱Fig.5 LOFAR spectrum of the receiving signal with hydrophone No.1
给出时间区间[100,950]的频率300 Hz 和350 Hz 线谱声强干涉起伏如图6 所示。其中,左侧图中两频率线谱声强的干涉起伏,通过式(12)对时间进行重采样且对线谱声强进行插值变换,变换后声强随时间的变化干涉起伏如图6 右侧图所示,图中黑色实线表示两频率线谱声强峰值对应位置。可以看出,变换后的两线谱声强干涉起伏满足式(11)对应关系,即时间变量t′在时间区间对应频率 ω1线谱声强干涉起伏与经过尺度伸缩的时间区间内 ω2线谱声强干涉起伏满足正比关系,此时和两者之间的相关系数达到最大。
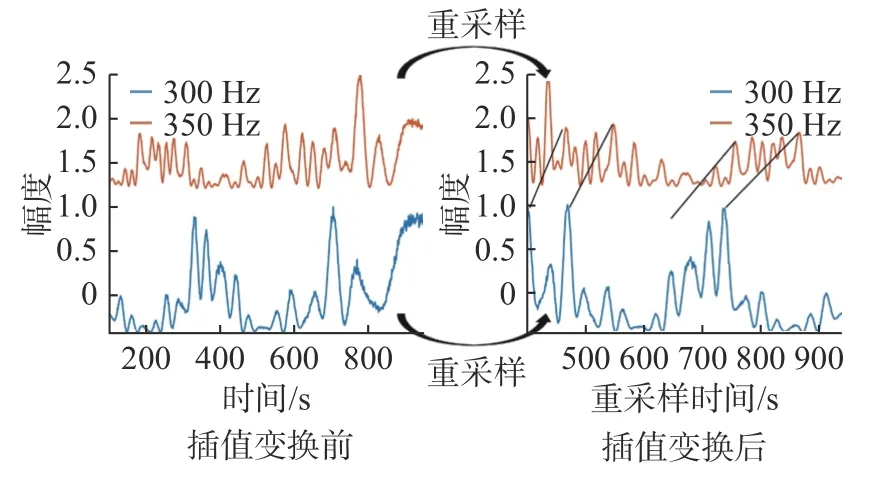
图6 第1 号水听器100~950 s 时间区间内300 Hz 和350 Hz线谱声强干涉起伏Fig.6 Interference fluctuation of 300 Hz and 350 Hz acoustic intensity with hydrophone No.1 from 100 s to 950 s
若距速比和最近通过时间搜索值bs和tCPAs偏离真实值,则相关系数减小。在不同bs和tCPAs假设值条件下,分别对300 Hz 和350 Hz 线谱声强在时间区间[350,900]重采样,得到插值变换后的线谱声强干涉起伏,两者间的相关系数代价函数如图7所示。由图可看出,代价函数最大值对应最近通过时间和距速比估计结果分别为961 和408。
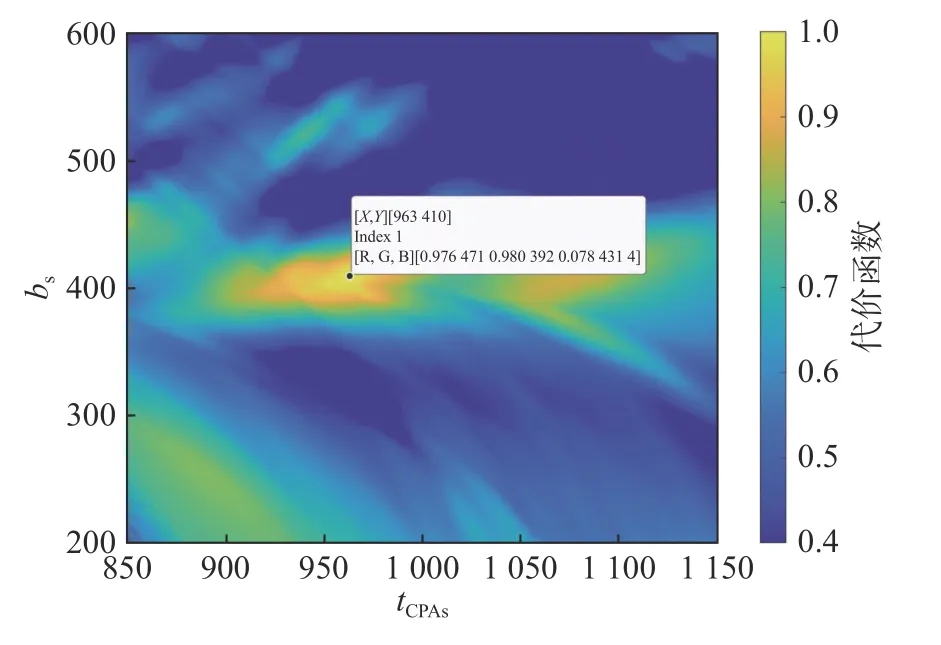
图7 根据第1 号水听器频率300 Hz 和350 Hz 声强干涉起伏计算得到代价函数Fig.7 Cost functions of acoustic intensity interference fluctuation of hydrophone No.1 at 300 Hz and 350 Hz
时间区间从[200,750]到[350,900],各区间间隔为10 s。给出不同时间区间的最近通过时间和距速比估计结果,如图8 所示。红色方框为真实值,蓝色星号表示各参数估计结果,可见,其稳定分布在真实值附近。通过K-means 聚类算法求取各区间参数估计结果的质心[22],如红色星号所示,对应的最近通过时间=956 和距速比=407 作为第1 号水听器的声源运动参数估计结果。

图8 根据第1 号水听器频率300 Hz 和350 Hz 声强干涉起伏计算得到不同时间区间的参数估计结果Fig.8 Motion parameter estimation results in different time intervals which obtained by acoustic intensity interference fluctuation of hydrophone No.1 at 300 Hzand 350 Hz
同理,时间区间从[500,1 150]到[650,1 300],各区间间隔为10 s,第2 号水听器不同时间区间的最近通过时间和距速比参数估计结果如图9 所示。由图可知,估计结果稳定分布在真实值附近。质心值对应的最近通过时间=1 345 和距速比=708 作为第2 号水听器的声源运动参数估计结果。

图9 根据第2 号水听器频率300 Hz 和350 Hz 声强干涉起伏计算得到不同时间区间的参数估计结果Fig.9 Motion parameter estimation results in different time intervals which obtained by acoustic intensity interference fluctuation of hydrophone No.2 at 300 Hz and 350 Hz
根据式(14),利用双水听器的声源运动参数估计结果计算出速度为2.03 m/s。图10 是在不同声源速度条件下,利用所提方法实现的声源速度估计。可以看出,所提方法能有效实现不同速度声源的速度估计。存在误差的原因一方面是噪声的存在对估计结果产生一定影响;另一方面,文中根据反射类波导条件,在常规意义上将波导不变量看作经验值1,实际上波导不变量并不严格等于1,这导致估计得到的距速比和最近通过时间存在偏差,影响声源速度估计结果。
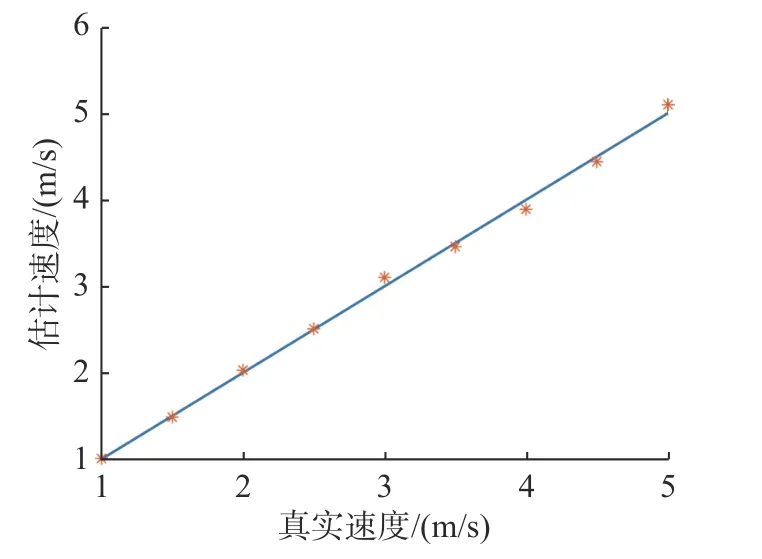
图10 不同声源速度估计结果Fig.10 Estimation results of velocity with different acoustic sources
关于双水听器的布放间距,这里分别以声源平行和垂直于双水听器的运动场景进行说明。通常情况下,声源速度约在1~5 m/s 之间。对于声源平行于双水听器运动情况:若双水听器布放距离为100 m,那么最近通过时间差为20~100 s。由图8 和图9 可看出,最近通过时间估计值存在10 s 量级误差,此时由式(14)计算得到声源速度估计的误差最高将达到50%;而若双水听器布放距离为1 000 m,那么最近通过时间差为200~1 000 s,此时声源速度估计的误差最高为5%。
同理,对于声源垂直于双水听器运动情况:根据式(14)可以看出,双水听器的最近通过时间相消,此时速度估计结果由距速比决定。由图8 和图9可以看出,距速比估计结果存在大概10 s 量级误差。随着双水听器布放距离增大,距速比之差增大,距速比误差量级一定,声源速度估计误差将降低。因此在满足波导环境平坦条件前提下,尽量保证双水听器间距远距离布放。该结论对于声源非平行和非垂直于双水听器的运动场景同样适用。
4 结束语
针对低SNR 时难以利用LOFAR 谱中宽带连续谱条纹状干涉图样估计声源运动速度的问题,提出一种基于双水听器利用线谱声强干涉起伏估计声源速度方法。利用声源与双水听器的距离位置关系,通过不同频率线谱声强干涉起伏获得最近通过时间和距速比参数,实现浅海反射类简正波主导的波导环境下的低速声源运动速度估计。仿真实验结果表明,所提方法对背景噪声下低速运动声源有较好的测速效果,不需要采用大孔径基阵,非常适合在小平台探测模块上使用。
未来研究中可以考虑在夏季典型负跃层声速剖面时,声场可能由反射类简正波主导变为由折射类简正波主导,此时所提方法应用性将受到限制。如何在折射类简正波主导情况下实现声源速度等参数估计将是下一步要开展的工作。
猜你喜欢
振动与冲击(2022年17期)2022-09-23
舰船科学技术(2022年10期)2022-06-17
电声技术(2022年3期)2022-04-28
应用科技(2020年1期)2020-06-18
应用声学(2020年2期)2020-06-08
汽车实用技术(2018年10期)2018-06-01
舰船科学技术(2015年8期)2015-02-27
化工自动化及仪表(2015年5期)2015-01-13
声学技术(2014年1期)2014-06-21
舰船科学技术(2014年5期)2014-03-08