
无人直升机自转着陆功能设计
2023-05-24 07:46王志敏王青林黄贤开
无线互联科技 2023年5期
王志敏 王青林 黄贤开

摘要:文章以单旋翼带尾桨的小型无人机作为对象,研究发动机在空中停车时的安全着陆问题。根据直升机自转飞行的经验,将自转着陆分成3个阶段,为无人直升机设计了自转着陆功能。为了使直升机触地速度降到最低,多次使用软化控制指令,并且巧妙地设计软化因子。实验表明,设计自转着陆功能能够使无人直升机在发动机停车的情况下安全着陆。研究成果对无人直升机的自转着陆问题有一定的参考意义。
关键词:无人直升机;自转着陆;飞行控制;半物理仿真
中图分类号:V249文献标志码:A
0 引言
自转是直升机特有的飞行状态。当直升机处于自转状态下,桨叶的旋转不再依赖发动机驱动,而是由自下而上的来流形成的空气动力驱动。通常发生以下情况时,直升机可采用自转飞行的方式安全着陆:(1)发动机或传动系统故障,无法为旋翼提供动能;(2)尾桨失效,无法平衡旋翼的反扭矩;(3)进行直升机陡降飞行科目中,避免进入涡环状态[1-3]。
在有人直升机中,飞行员可以通过长时间的模拟训练,熟练掌握自转着陆操作,当发动机在空中停车时,飞行员能够根据当前飞行状况,迅速进行相应的操作,使直升机进入自转下滑状态,最终实现安全着陆[4]。而对于无人直升机来说,当发动机在飞行过程中突然失效时,如果没有自转着陆功能,最直接的影响就是飞机坠毁,同时,还有可能对地面建筑以及地面人员造成伤害[5]。因此,开发无人直升机的自转着陆功能十分必要。
想要无人直升机具备自转下滑能力,一方面,直升机本身需要具备良好的自转性能;另一方面,在飞控计算机上需要开发可靠的自转着陆功能[6]。本文以单旋翼带尾桨的小型无人直升机作为研究对象,根据有人直升机自转着陆的过程和要求,为无人直升机设计自转着陆功能,并进行仿真验证。
1 自转着陆过程
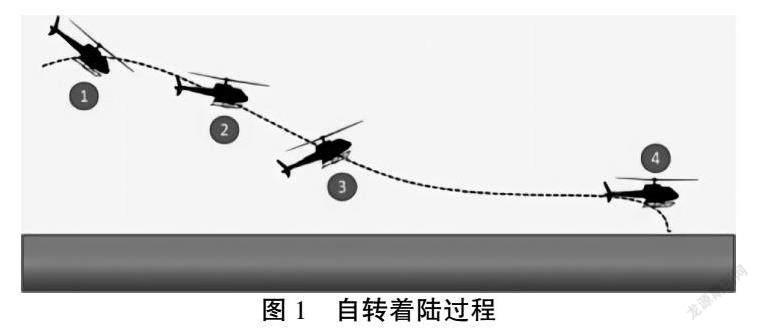
图1为有人直升机自转着陆过程,整个过程通常可以分为以下3个阶段[7-10]。
(1)建立自转阶段。
这一阶段(图1中的①)开始于发动机停车后,飞行员应当在短时间内进行操作,应迅速将总距降至最低,使旋翼尽可能快地储存能量,并操纵横向驾驶杆和脚蹬,防止直升机因发动机动力突然消失后扭转距不平衡导致的旋转,同时操纵纵向驾驶杆,使直升机进入自转下滑状态。
(2)稳定下滑阶段。
在稳定下滑阶段(图1中的②),飞行员应该操纵总距,控制旋翼转速在一个稳定的区间,同时进行其他操作以保持直升机的姿态稳定。
(3)减速着陆阶段。
当直升机下滑至一定高度后,飞行员应向后拉杆使直升机抬头减速(如图1中的③)。当直升机接近地面时,飞行员应立即提距,利用旋翼中的剩余能量来减小下降率(如图1中的④),在飞机接触地面后,应立即释放总距,保证着陆安全。
在有人直升机飞行过程中,驾驶舱中飞行员的操作对飞机的飞行起着决定性因素,机上的飞控系统起辅助作用[11]。而在无人直升机的试飞过程中,飞机根据地面测控站发送的指令以及机上各种传感器的信号自动计算并给予舵机输出,控制无人直升机自主飞行。一般无人直升机试飞时都配备一个操作手,操作手的功能主要有两个:一是在大风等恶劣天气的情况下帮助无人直升机起降;二是飞机不响应指令或指令响应不正常时帮助无人直升机紧急降落。地面操作手的作用十分有限,无法像有人机中的飞行员一样能直接感受到飞机姿态的变化,难以进行高难度的飞行。因此,当无人直升机在空中飞行时发动机突然失去动力,只能通过预先设计的自转着陆程序控制无人直升机自转飞行并安全着陆。
2 无人直升机自转着陆功能设计
2.1 建立自转阶段
建立自转阶段的控制流程如图2所示。当无人机在空中因发动机停车等因素需要进行自转着陆时,应首先退出当前的导航模态和飞行模态,确保自转着陆能够正常进行;接着断开高度通道控制,并且将总距降低至最低;同時,将横向通道、纵向通道以及航向通道转为内环控制,在第一时间控制住飞机的姿态。
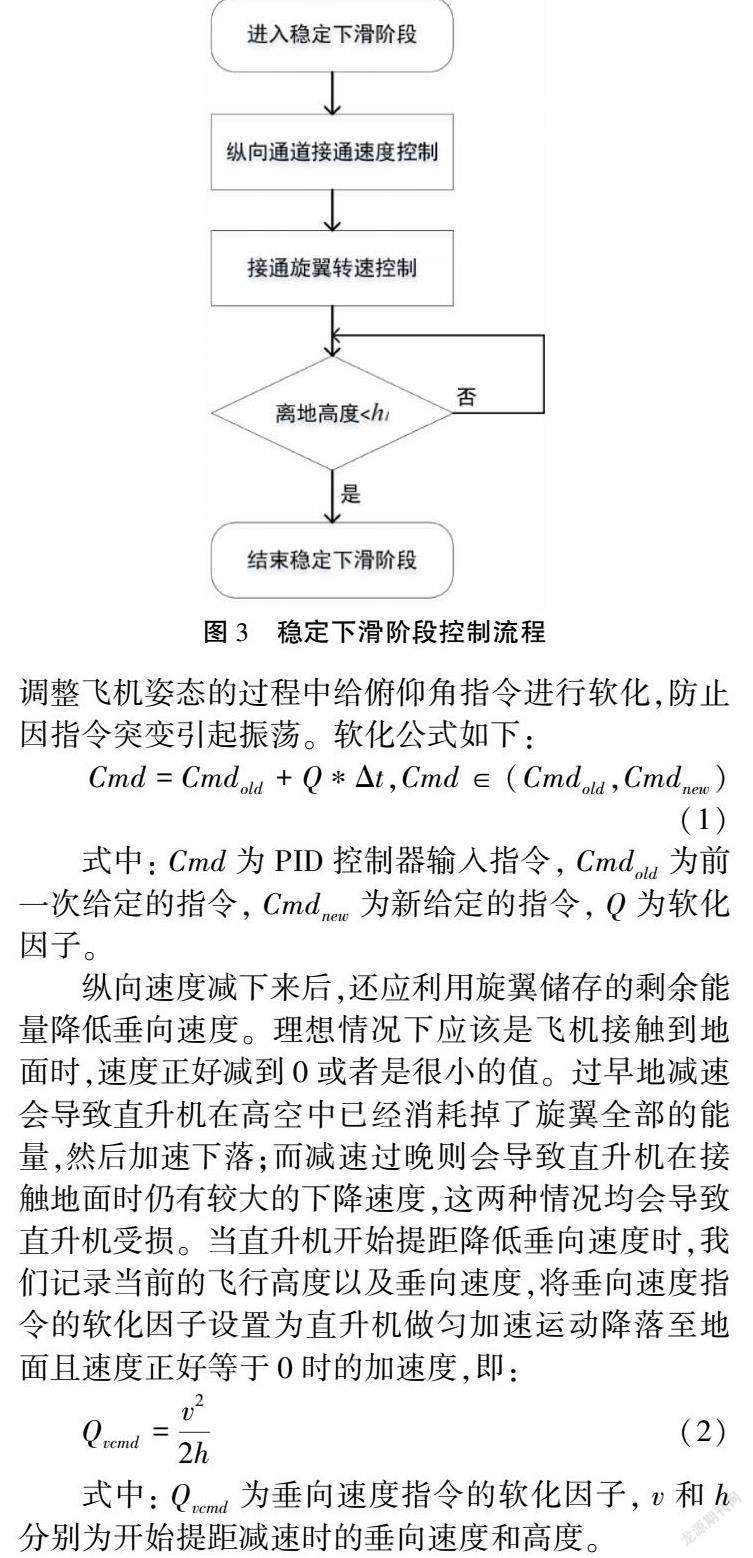
2.2 稳定下滑阶段
稳定下滑阶段的控制流程如图3所示。进入稳定下滑阶段后,纵向通道需要接通速度控制。由于直升机以经济巡航速度飞行时,对旋翼能量的消耗最小[12],因此,给定的纵向速度指令应为经济巡航速度。与此同时,开启旋翼转速控制,防止旋翼超转,旋翼转速控制器可使用传统的PI控制器,通过调节总距达到控制旋翼转速的效果,使直升机在下滑过程中保持稳定的旋翼转速,当直升机下滑至一定高度h1时结束稳定下滑阶段,h1可以通过仿真设置一个合理的值,下文中提到的h2同理。
2.3 减速着陆阶段
减速着陆阶段的控制流程如图4所示。根据上述描述的自转着陆过程,在减速着陆阶段,需要快速降低纵向速度和垂向速度。样例无人机使用PID控制器控制纵向速度,如果只是给定速度指令,在短时间内无法将速度降低至目标值,而用增加控制系数方法提高响应速度,又会导致严重超调,影响飞行安全。因此,通过改变飞机俯仰的方式降低纵向速度,当纵向速度降低至安全着陆速度时再调整好飞机姿态。调整飞机姿态的过程中给俯仰角指令进行软化,防止因指令突变引起振荡。软化公式如下:
纵向速度减下来后,还应利用旋翼储存的剩余能量降低垂向速度。理想情况下应该是飞机接触到地面时,速度正好减到0或者是很小的值。过早地减速会导致直升机在高空中已经消耗掉了旋翼全部的能量,然后加速下落;而减速过晚则会导致直升机在接触地面时仍有较大的下降速度,这两种情况均会导致直升机受损。当直升机开始提距降低垂向速度时,我们记录当前的飞行高度以及垂向速度,将垂向速度指令的软化因子设置为直升机做匀加速运动降落至地面且速度正好等于0时的加速度,即:
同时,适当增加控制系数,提高控制器的响应速度,使得直升机的垂向速度能够较快地跟随速度指令的变化而变化。当直升机接触到地面时,将总距迅速降低至最低,完成自转着陆。
3 仿真结果
以飞控计算机为核心搭建半物理仿真环境,对自转着陆功能进行仿真验证,结果如图5所示,因涉及商业秘密,将实验部分数据隐去。从图5中可以知道,直升机大概在109.7 s处发动机空中停车,随后旋翼开始掉转速。在111.2 s处,飞控系统认为发动机不再提供动力,开始执行自转着陆程序,在第一时间内将总距降至最低。111.2 s到114.5 s为建立自转阶段,此时直升机在调整姿态。从114.5 s开始,直升机进行稳定的自转下滑,此时旋翼转速开始增加。在120.7 s时,为防止旋翼超转,直升机开始提总距,同时垂向速度伴随着总距的增加明显减少。在125.5 s时结束稳定下滑阶段,直升机开始抬头,随后纵向地开始减速。在129.2 s时,直升机开始恢复姿态并提距降低垂向速度。大概在131.2 s时,直升机接触地面并将总距降至最低,完成自转着陆程序。由仿真结果可以看出,当直升机接触地面时,纵向速度为3.78m/s,垂向速度几乎为0。因此,本文设计的功能可以使无人直升机安全自转着陆。
4 结语
无人直升机在空中发动机停车时是非常危险的,不仅直升机会坠毁,还会对地面人员造成严重的安全隐患。本文介绍了有人直升机的自转着陆过程,参照飞行员的操作,将整个自转着陆分成3个阶段,为无人直升机设计自转着陆功能。在每个阶段,根据以往无人直升机的飞行进行了分析,设计合理、可靠的控制策略。最后搭建半物理仿真环境,验证了该功能的有效性。实验证明,直升机在关闭发动机后在空中保持自转飞行,降落时的触地速度也非常小,能够安全、平稳地着陆。
参考文献
[1]艾剑波,李家云,孙朝华.AC311直升机自转下滑性能优化分析与处理[J].直升机技术,2014(4):24-28.
[2]孟万里,陈仁良.直升机单发失效后自转着陆轨迹优化[J].航空学报,2011(9):1599-1607.
[3]刘俊强,伞冶,王子才.直升机旋翼自转着陆过程的仿真模型[J].计算机仿真,2000(6):4-7,15.
[4]杨志强,周灵玲,马阔.直升机自转下滑特性探究[J].中国战略新兴产业,2018(24):177.
[5]MENG WANLI,CHEN RENLIANG.Study of helicopter autorotation landing following engine failure based on a six-degree-of-freedom rigid-body dynamic model[J].Chinese Journal of Aeronautics,2013(6):1380-1388.
[6]龐晓楠,赖水清.无人直升机自转着陆控制设计与仿真验证[J].直升机技术,2015(4):24-29.
[7]张余华.直升机自转着陆过程的最优控制[D].南京:南京航空航天大学,2004.
[8]许祖兴.直5首次自转着陆飞行试验[J].航空知识,2006(5):30.
[9]黄开明,黄金泉,周文祥,等.直升机自转下滑训练过程发动机的控制规律[J].航空动力学报,2009(11):2595-2600.
[10]D SANTAMARA,VIGURIA A,BEJAR M,et al.Towards autonomous autorotation landing for small size unmanned helicopters[J].Journal of Intelligent & Robotic Systems,2013(1-4):171-180.
[11]王晓勇,邓彦敏.共轴式直升机自转下滑着陆飞行轨迹近似计算[J].飞行力学,2002(4):10-13.
[12]李宗江.直九空中停车后着陆方法探讨[J].科学导报,2013(16):365.
(编辑 傅金睿)
