
横行天下
2023-05-30 10:48李尔欣
名车志 2023年1期
李尔欣

不同于常人的刻板印象,四轮汽车并非迟至20世纪下半叶才学会横向移动,而是早在近百年前即已尝试过。譬如,在某个摄于1933年的影像片段中,一辆厢式轿车便借助安装在车尾的“FifthWheel第五车轮”,以甩尾的方式快速完成平行泊车;另外,根据文字资料,甚至在1927年就已经有概念车试过将前轮“翻折”90度,以使车辆能横向移动的方案。
只不过,对于量产乘用车来说,相比偶尔的便利,更重要的是保证移动过程中的安全,可无论是安装第五车轮还是90度“翻折”车轮,都会因为活动件失控而形成安全隐患。以至于在此后相当长的时间里,水平地进行横向移动依然只是概念车及各类原型车的“专有技能”。
但与此同时,车辆在进行大角度变向行驶时所呈现的优越机动性也一直诱惑着那群搞汽车研发的人。于是,当量产乘用车基本确定以采用Ackerman阿克曼转向结构的前轮为转向轮后,各种基于后轮开发的辅助转向系统便陆续登场。

如是演变至今,由整车制造商或一级供应商打造的各色后轮辅助转向系统,基本可分为主动式和被动式两大类。例如,Citroën的量产车于20世纪90年代广泛应用的后轮随动转向系统即是典型的被动式:利用多个弹性连接件迫使后轮在车辆转弯时跟随前轮偏轉一定的角度,以便整车更利落地完成转向动作。
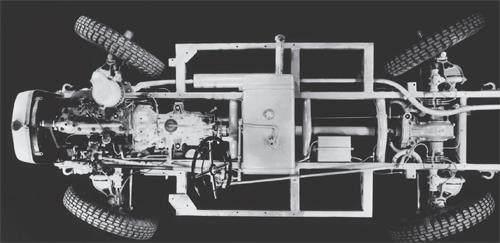
至于主动式,则在历经机械式、液压式,再到电动式的演变后,如今已成为豪华品牌高级别车型的主流配置,并通称4WS四轮主动转向系统。此类系统大多会在低速时使后轮与前轮反向偏转,以减小转弯半径;待到高速时,又让后轮改为与前轮同向偏转,以增加行驶稳定性。值得一提的是,四轮汽车应用4WS主动转向系统的历史其实相当久远。例如,造于1907年的DMGDernburg Wagen就是通过在后轴布置转向器,并以此操控后轮完成主动转向。
可惜,在传统燃油车上,车轮的转向角度被悬架的导向机构以及驱动半轴的万向节等元件所限制,一般较难做出偏转90度的动作。而主要承担保证车辆循迹性重任的后轮,车厂更是有意控制转向角度,很少有允许超过15度的。如此小的转向角,自然无法让车辆“横行霸道”,多数车型甚至连悍马EV的“蟹行”都做不到。直到轮毂电机出现后,四轮汽车才真正有能力去玩转横向行驶。
通常情况下,轮毂电机是一种将纯电动车的驱动、传动以及制动元件都集成到车轮内的行走系统。这意味着,采用轮毂电机能够解除传统底盘上束缚车轮活动自由的大部分“枷锁”,从而赋予车辆极高的机动性,甚至可以完成水平横移。

只是,相比可配备硕大车轮的商用车或其他特种车辆,量产乘用车的常规轮毂尺寸显然要小得多。而对于如此紧凑的轮毂来说,光是塞入电机、制动和减速器这几个最基本的元件,就已经令空间捉襟见肘,更何况还得解决散热、簧下质量等顽疾,这无疑让研发、量产以及控制成本的难度大幅增长。因此,像悍马EV这样的量产纯电动车在配置动力系统时,普遍改用把电机装在轮毂之外的轮边电机。

诚然,此举会再度封印车轮的部分转向角度,但相比在传统燃油车上的待遇,轮边电机留给车轮的自由度已足以令车辆的机动性较同类燃油车更胜一筹,抑或是可以用更简洁的底盘结构完成原本需要精密机械系统才能做到的极限动作。例如,悍马EV如今只需两台电机就能让后轮主动跟随前轮偏转10度,而此前GMC系列皮卡车型装备的Quadrasteer四轮转向系统虽然可让后轮偏转多达15度,但其本身却是一套由传感器及ECU电控单元控制,并使用线控技术才能完成转向的复杂系统。
而且话说回来,即便将来有量产乘用车配备轮毂电机,并且能够做到水平横移,也很难成为主流。因为,在绝大多数日常用车场景中,车辆既不必“蟹行”,更不用水平横移,仅凭现有的小角度4WS四轮主动转向系统已足以改善行驶性能,或者应对偶发状况。若是规定量产乘用车必须有横向行驶的能力,那与其等待依然保留诸多机械元件的轮毂电机,不如直接跳到更为科幻的球形轮胎。毕竟那是能让四轮汽车实现“全向行驶”的黑科技,要在途中进行一次水平横移,还不是信手拈来的事?
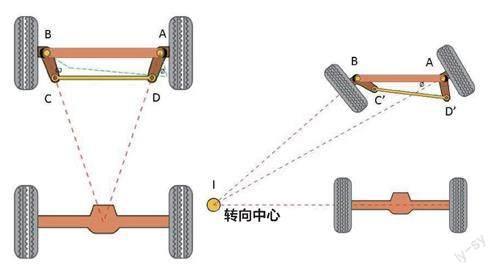
阿克曼转向结构原本是德国的马车工程师于19世纪中叶发明出来用以改善马车转向性能的“创新”转向结构。众所周知,传统的欧洲四轮马车用的是单铰链转向结构,即以车辕为轴心,进而带动整个前轴进行转向。但这也意味着马车在转弯时,前轴的摆动幅度很大,并且容易在特定角度下卡死。
而阿克曼转向则将前轴改成四个顶点均可活动的梯形结构。如此一来,车辆转弯时车轮只需转动较小的幅度,同时也使车辆更易于转向。之后,随着四轮汽车开始盛行,与阿克曼转向结构相似的几何形状便被引入汽车底盘的设计中。时至今日,汽车工程师在为转向轮配置悬架构造时,也依然遵循着阿克曼转向结构的原理。
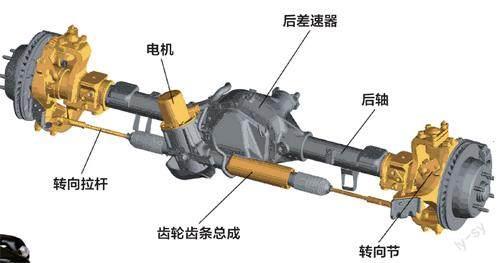
在21世纪初,GM通用曾与供应商Delphi德尔福联合开发出一套基于电控机械式四轮转向系统,那就是Quadrasteer四轮主动转向系统。
Quadrasteer系统主要由传感器、可控转向后轴、电控电机驱动执行器,以及ECU控制单元等四大部件組成。其中,传感器负责收集转向角度和车速信号,操控指令则经ECU计算后传给电控电机,再由电机驱动后轴的齿轮齿条拉动车轮偏转相应的角度。
在实际工作中,Quadrasteer系统可由手动开关切换3种模式:后轮不转的2WS模式、系统自动选择是否转动后轮的4WS模式,以及后轮转向始终激活的4WS挂车模式。而当后轮需要转向时,其转向角度由车速决定:在80公里/小时以下,后轮与前轮反向;超过80公里/小时后,后轮将改为与前轮同向。
也正由于其工作模式与悍马EV的Crabwalk蟹行机动有所相似,因此悍马EV的双电机后轴常被视为电动版Quadrasteer。

事实上,除配备4WS四轮主动转向系统的量产乘用车外,还有一些特种车辆可以在不转动车轮的前提下,单纯依靠车轮本身的特性就能实现横向移动。而能实现这番操作的车轮则至少有两种:常用于大型载重机械的Mecanum wheel麦克纳姆轮,以及目前主要是轮式机器人在用的Omni wheel全向轮。
这两种车轮虽然装在轮毂上的roller辊子的类型与角度均不相同,但实际运行时却又都依靠辊子的滚动来实现全向移动,也就是说,这两种车轮其实可让车辆在平面上向任意方向移动或自转,其中自然包括水平横移。不过,由于辊子的受力结构较为纤细,因此这两种车轮都不能像量产乘用车的车轮那样,以紧凑的尺寸承受重压并在复杂路面上高速行走,而只能在小尺寸、轻载重、快速移动,以及大尺寸、多层辊子、大载重、缓慢移动两种模式之间二选一。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
昆明医科大学学报(2022年1期)2022-02-28
装备制造技术(2021年4期)2021-08-05
小学生学习指导·爆笑校园(2019年6期)2019-09-10
世界宪法评论(2017年0期)2017-12-06
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
中国自行车·骑行风尚(2014年4期)2014-10-10
小品文选刊(2009年19期)2009-11-26
