
基于改进YOLOv4的2021年海地7.2级地震震后滑坡识别
2023-05-30 17:20付饶何敬刘刚
地震研究 2023年2期
付饶 何敬 刘刚
摘要:以国产高分二号影像为数据源,利用改进的YOLOv4算法对2021年海地7.2级地震诱发的滑坡进行识别。为提升模型的识别效率,用MobileNetv3替换了YOLOv4的骨干网络CSPDarknet53,并用深度可分离卷积替代YOLOv4中的普通卷积,优化了模型参数和网络结构。结果表明:改进后的YOLOv4算法目标识别精度达到91.37%,比普通YOLOv4检测速度提高了6.19 f/s,精度提高了5.24%,模型参数大小减少了80%。改进后的方法对滑坡的检测精度高于原YOLOv4算法,得到的滑坡位置更为准确,具有轻量化和实时性更高的优势,可为应急救援和灾情评估提供更加可靠的数据。
关键词:YOLOv4;海地地震;滑坡识别;高分影像
中图分类号:P642.22 文献标识码:A 文章编号:1000-0666(2023)01-0300-08
doi:10.20015/j.cnki.ISSN1000-0666.2023.0012
0 引言
许多地震发生后,都会引发大量的滑坡,如何快速准确地确定滑坡发生的位置和数量,对震后抢险救灾具有重要意义。2008年汶川MS8.0地震引发了大量滑坡,许冲等(2009)通过目视解译的方法共解译出约46 560处崩塌、滑坡、泥石流等地震次生地质灾害,但这种方法工作量大、时间长、效率低,其时效性无法满足救灾需求(林齐根等,2017)。为了提升效率,研究人员利用计算机分类的方法进行滑坡识别的探索,如牛全福等(2010)利用灾前灾后的Quickbird影像,结合数字高程模型和其他基础数据,采用监督分类的方法得到了滑坡信息;Keyport等(2018)利用危地马拉的高分辨率航空遥感图像,对比了像素和对象两个级别的滑坡提取精度,结果显示面向对象的总体准确率略高于基于像素的方法。但这些计算机分类方法需要事先提取图像中滑坡的特征,算法设计较为复杂,可扩展性受到限制,不具备实时检测的能力。近年来,随着地质灾害观测数据增多,计算机性能不断提高,通过机器学习、深度学习等方法来识别滑坡已成为研究的热点。
机器学习通过提取图像中各类目标的特征构建模型,具有较高的自动化程度(Bialas et al,2016;Micheletti et al,2014;Kavzoglu et al,2019;Tien et al,2014;Huang,Zhao,2018)。虽然其精度和自动化程度较高,但仍需大量时间选择如坡度、地形、土壤等特征。而深度学习在进行滑坡识别时不用人工选择特征,所接纳的样本量更大,更适合于大场景的滑坡识别(巨袁臻等,2020),常用的有RetinaNet、Faster R-CNN、SSD和YOLO等算法(Lin et al,2017;Ren et al,2015;Liu et al,2016;Redmon et al,2016)。很多学者将深度学习应用于滑坡识别,并不断改进算法,如Cheng等(2021a)利用无人机影像和卫星影像开发了基于RetinaNet深度学习的滑坡自动识别模型,可以绘制滑坡现场的裂缝,并对识别出的滑坡裂缝与现场调查结果进行定量对比;Cheng等(2021b)以云南省巧家县和鲁甸县的谷歌遥感影像为数据源,提出了一种改进的YOLO-SA网络滑坡检测模型,滑坡识别准确率达94.08%,速度达42 f/s,F1分值为90.65%。
随着深度学习网络模型的复杂和深入,参数变得越来越多。过多的模型参数意味着需要消耗更多的内存和时间,在紧急情况下无法快速获得结果,影响深度学习模型应用于快速检测。因此,如何在保持高准确率的同时,减少模型参数以提高目标检测速度,是一个亟待解决的问题。鉴于此,本文在原有YOLOv4(You only Look one v4)算法的基础上,通过优化网络结构,设计了滑坡检测模型YOLOv4-MobileNetv3,并对2021年海地7.2级地震后GF-2卫星遥感影像中的滑坡进行自动识别,验证了模型在识别震后卫星影像滑坡方面的可靠性。该方法为震后生命救援和快速灾害评估提供了支持,为滑坡风险评估和灾害调查奠定了基础。
1 数据与方法
1.1 数据
1.1.1 研究区概况
海地位于伊斯帕尼奥拉岛西部,国土总面积27 750 km2,其中27 560 km2是陆地,190 km2是水域。海地有各种热带气候类型,平原地区一般干旱,山区一般湿润,在科迪勒拉山则可见高山寒带气候。
海地尼普斯省当地时间2021年8月14日7时29分发生7.2级地震,震中距首都太子港约150 km,震源深度约10 km。海地南部省省会莱凯和大湾省省会热雷米受灾最为严重,地震造成至少724人死亡、2 800人受伤(刘旭霞,秦芮,2021)。
1.1.2 基于高分2号影像的数据集制作
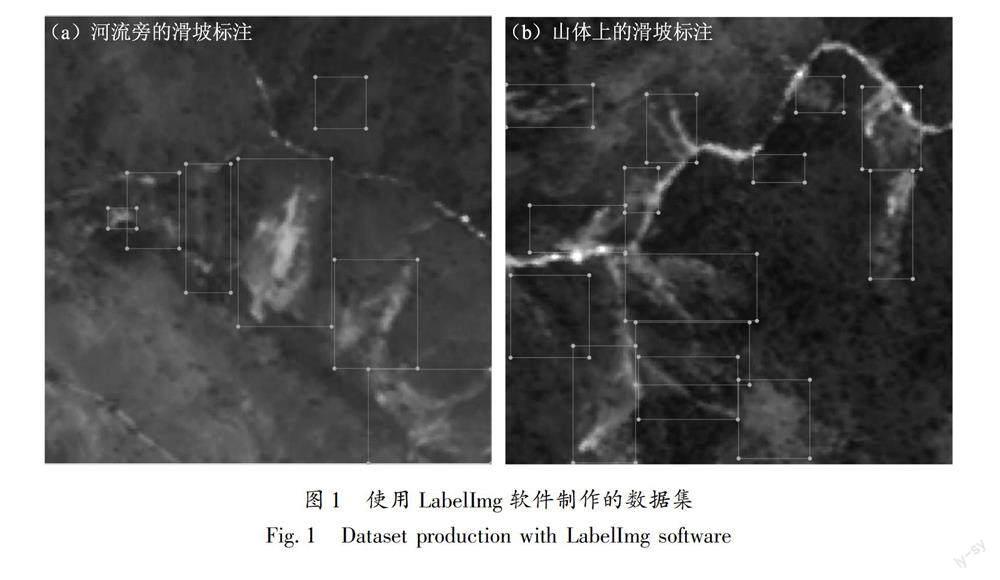
在海地7.2级地震发生后,中国高分二号遥感卫星对受灾区域进行了成像拍摄。本文选取其中受灾较为严重的区域进行研究,通过影像校正、融合等预处理后,最终生成空间分辨率为1 m、面积为658 km2的海地局部真彩色影像。制作完成的影像由于数据量过大无法直接输入到深度学习模型中,需要对图像进行分割后再进行数据制作。Bochkovskiy等(2020)發现使用608×608像素尺寸的图像实验效果最好,因此本文选择将原始影像分割成608×608像素的图像块。图像分割后从中挑选出包含滑坡的图像,使用LabelImg软件对图像中的滑坡进行PASCAL VOC格式(Everingham et al,2010)的标注,如图1所示。制作的数据集有162张影像,共包含1 208个滑坡,划分训练集和测试集的比例为常用的8∶2,即80%的图像用于训练,20%的图像用于测试。
1.2 方法
1.2.1 改进YOLOv4算法的滑坡识别总体流程
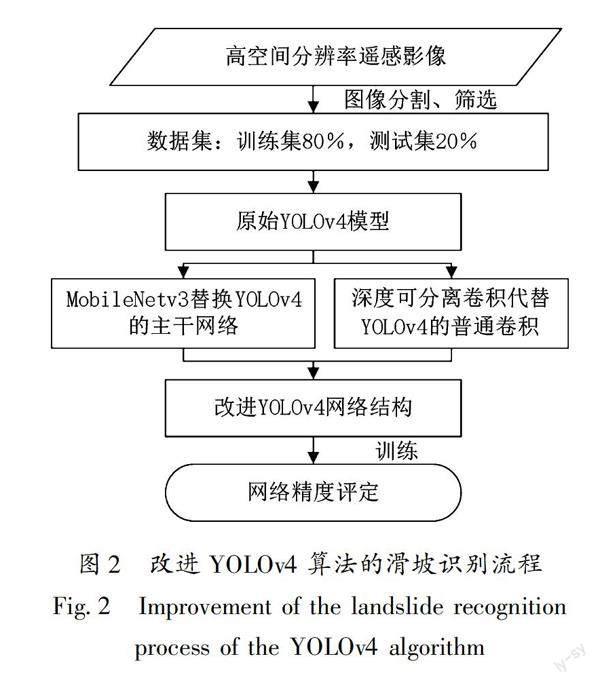
首先,对图像进行预处理,将图像分割为适合模型的大小,筛选出滑坡数量较多的图像并在图像上打标签制作数据集。然后,对YOLOv4模型的网络结构进行改进,用MobileNetv3网络替换骨干网络,并用深度可分离卷积代替YOLOv4中的普通卷积,降低网络结构的复杂性。最后,将所制作的数据集在改进的模型上进行训练,进行精度评定。改进YOLOv4算法的滑坡识别流程如图2所示。
1.2.2 YOLOv4网络结构
YOLO系列算法是最初由Redmon等(2016)提出的基于回归目标识别方法,是一种单阶段目标检测算法,使用卷积神经网络(CNN)对图像进行处理,可以直接计算分类结果和目标位置坐标。通过端到端目标定位和分类,大大提高了检测速度。YOLOv4算法在数据处理中引入了马赛克数据增强,对骨干、网络训练、激活函数、损失函数进行了优化,使YOLOv4算法速度更快,在实时目标检测算法中达到了精度和速度的最佳平衡(Bochkovskiy et al,2020)。
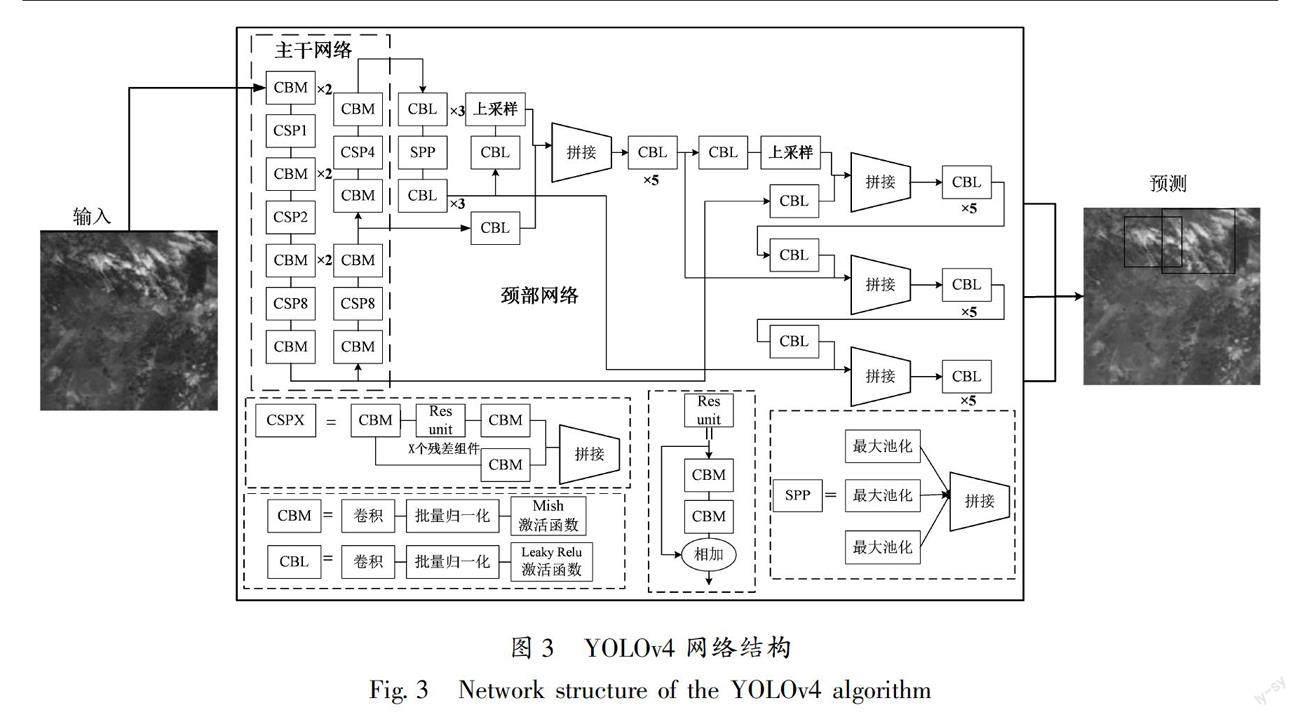
如图3所示,YOLOv4网络结构主要采用开源神经网络框架CSPDarknet53作为主要骨干网络来训练和提取图像特征,采用PANet(Path Aggregation Network)作为颈部网络,从而更好地融合提取特征(Wang,He,2019),头部采用YOLOv3算法实现目标检测(Redmon,Farhadi,2018)。其主要模块的组成和功能如下:CBL(Convolution,Batch Normalization and Leaky-ReLU)是一个由卷积层、批处理归一化层和Leaky-ReLU激活函数组成的模块,是YOLOv4网络中最常见的结构。CBM(Convolution,Batch Normalization and MISH)模块和CBL模块进行特征提取,两者的区别在于CBM的激活函数使用MISH而不是Leaky-ReLU。SPP(Spatial Pyramid Pooling)为空间金字塔池化层,主要是将不同大小的卷积特征转换为相同长度的池化特征(He et al,2015)。CSPX(Center and Scale Prediction)借鉴CSPNet网络结构,由3个卷积层和X个Res unint模块拼接组成,该模块可以将低层次特征分为2部分,通过融合跨层次特征来提高CNN的学习能力(Wang et al,2020)。Res unit借鉴Resnet网络中的残差结构,让网络可以构建得更深。
1.2.3 MobileNetv3网络结构
MobileNet模型是Google针对手机等嵌入式设备提出的一种轻量级深层神经网络,其核心思想是深度可分离卷积块(Howard et al,2017)。
对于一个卷积点而言,假设有一个3×3大小的卷积层,其输入通道为16,输出通道为32。具体为,32个3×3大小的卷积核会遍历16个通道中的每个数据,最后可得到所需的32个输出通道,所需参数为4 608个。
应用深度可分离卷积结构块,用16个3×3大小的卷积核分别遍历16个通道的数据,共得到16个特征图谱。在融合操作之前,用32个1×1大小的卷积核遍历这16个特征图谱,所需参数为656个。MobileNet中,深度可分离卷积由Depthwise(DW)和Pointwise(PW)两个部分结合,提取图像的特征层,相比常规的卷积操作,其参数数量和运算成本更低。图4为滑坡图像经过深度可分离卷积后的结果。
本文使用的MobileNetv3结构相比于v1和v2使用了特殊的bneck结构(Howard et al,2019),如图5所示,综合了以下4个特点:①MobileNetV2具有线性瓶颈的逆残差结构。即先利用1×1卷积进行升维度,再进行下面的操作,并具有残差边。②MobileNetv1的深度可分离卷积。在输入1×1卷积进行升维度后,进行3×3深度可分离卷积。③轻量级的注意力模型。这个注意力机制的作用方式是调整每个通道的权重。④利用H-swish代替swish函数。在结构中使用了H-swish激活函数,代替swish函数,减少运算量,提高性能。
1.2.4 本文使用的网络结构
YOLOv4使用主干特征提取网络CSPdarknet53获得的图像特征构建特征金字塔。本文YOlOv4网络中的CSPDarknet53结构相对复杂,参数量大,特征提取消耗时间较长,且在检测单类目标时容易产生过拟合的现象。
MobileNetv3网络主干部分的作用是进行特征提取,为了减少YOLOv4模型中的参数数量,提高识别精度和检测速度,笔者将CSPDarknet53特征提取网络替换为轻量级网络MobileNetv3,利用MobileNetv3网络获得的图像特征替换掉YOLOv4主干网络提取的图像特征进行特征金字塔构建。为了进一步减少参数量,使用深度可分离卷积代替YOLOv4的普通卷积,最后得到YOLOv4-MobileNetv3模型。
2 实验及结果分析
2.1 实验设置
本文使用以下硬件环境进行实验:RTX3090图形处理器、Intel i9-10900k处理器和64 GB內存。在训练过程中,参数逐渐优化和调整,batch大小设置为64,初始学习率设置为10-3。如果验证集上的loss值经过50个epoch(每个epoch指的是所有训练图像的前向传播)后没有减小,则学习率减小0.1倍,其中最低学习率为10-5。最后,对改进的YOLOv4-MobileNetv3模型进行约800个epoch的训练。
2.2 精度评价指标
2.2.1 PR曲线
PR曲线中P代表precision,即精确率,R代表recall,即召回率,是精确率与召回率的关系(Benjdira et al,2019)。一般情况下,将R设置为横坐标,P设置为纵坐标,两者一般呈反比关系:
P=TPFP+FP(1)
R=TPFN+TP(2)
式中:TP为正确检出的阳性样本数;FP为误检为阳性的阴性样本数;FN为未检出的阳性样本数。TP、FP、FN均在表1中列出。IoU为预测边框和真实边框的面积重叠率,对于一个滑坡,如果IoU≥0.5,则被认为是一个正确的预测TP(True-Positive);反之如果IoU<0.5,则被认为是一个错误的预测FP,即(False-Positive)。
2.2.2 F1分数
F1分数用于评价模型的综合性能,计算公式如下:
F1=2×P×R(P+R)(3)
2.2.3 平均准确率
在物体检测任务中经常使用平均准确率(Average Precision,简称AP)作为评价指标。AP定义为准确率和召回率曲线下的面积大小。为了计算方便,先选取横轴上的11个点(间隔为0.1)所对应的准确率,再取平均作为最终检测的平均准确率。R代表横轴,即召回率的值,Pinterp(R)代表了在召回率为R时准确率的数值,表达式如下:
AP=111∑Pinterp(R) R∈(0,0.1,…,1.0)(4)
2.3 结果与分析
图6为训练期间验证集的损失变化曲线。从图中可以看出,在训练初期损失值迅速下降,抖动范围较大。这是由于早期的学习率较大,能够产生较快的学习速度,并盡快将损失值降低为较低的水平。在训练的中后期,学习率逐渐下降,损失值的变化趋于稳定,下降速率变缓。
训练结束后,将改进后的YOLOv4-MobileNetv3模型与原YOLOv4模型进行比较,结果见表2。原模型总计识别出滑坡1 055个,正确识别936个,错误识别119个,识别准确率为77.5%,识别精确率为88.7%。改进后 模型总计识别出滑坡1 072个,正确识别1 007个,错误识别65个,识别准确率为83.4%,识别精确率为93.9%,平均准确率为91.37%,FPS为57.82 f/s。从测试结果可以看出,本文方法对滑坡的检测精度高于原YOLOv4算法,其中检测速度的提高得益于网络结构的改进,轻量级的Mobilenetv3网络取代了原先的卷积网络CSPDarknet53,减少了网络参数,提高了模型的运行速度。
对于目标检测方法来说,PR曲线是评价模型鲁棒性和有效性的基本指标之一。本文使用YOLOv4-MobileNetv3模型的PR曲线如图7所示,从图中可以看出,随着召回率的增加,准确率逐渐下降。
图8为原始YOLOv4与YOLOv4-MobileNetv3模型应用于海地地震数据集的检测结果比较。从图中可以看出,原始的YOLOv4模型可以检测到大部分滑坡,但漏掉了许多小目标,测试结果的精度低于YOLOv4-MobileNetv3模型。这说明YOLOv4-MobileNetv3模型训练更充分,具有更好的收敛效果,MobileNetv3等轻量级CNN具有更好的泛化能力,防止过拟合。虽然YOLOv4-MobileNetv3模型能够检测出遥感图像中大部分的滑坡,但也存在一些误检和漏检情况。这主要是由于震后高分辨率遥感影像的背景环境远比自然影像复杂,导致模型识别背景环境中的某些物体,如与滑坡图像特征相似的裸露土壤容易被误检。
3 结论
本文首先对遥感影像中的滑坡进行标记,制作数据集,然后利用YOLOv4深度学习目标检测模型对地震后遥感图像中的滑坡进行检测,并对YOLOv4模型的基本卷积网络框架进行改进,应用于海地地震后的滑坡识别,主要得出以下结论:
(1)在海地地震后的滑坡识别中,改进后的模型准确度为0.939,召回率为0.863 8,F1分值为0.828 8。与原YOLOv4模型相比参数量降低了80%,精度提高了5.24%,检测速度提高了6.19 f/s,体现了应用YOLOv4-MobileNetv3模型在滑坡后高分辨率卫星遥感影像上进行滑坡检测的可靠性。
(2)对YOLOv4-MobileNetv3模型与原始YOLO模型在海地地震数据集的检测结果进行对比发现,模型参数数量显著减少,但识别精度却得到了提升。结果表明,改进后的YOLOv4-MobileNetv3模型检测精度高、检测速度快、参数少,说明本文的优化方法是有效的。
(3)为了进一步提升模型的稳定性及识别能力,可采用多种类型的滑坡数据源对其进行训练,最终实现对多源数据、多类型滑坡的准确识别,为滑坡灾害的救援及灾害评估提供及时准确的数据支撑。
参考文献:
巨袁臻,许强,金时超,等.2020.使用深度学习方法实现黄土滑坡自动识别[J].武汉大学学报(信息科学版),45(11):1747-1755.
林齐根,邹振华,祝瑛琦,等.2017.基于光谱、空间和形态特征的面向对象滑坡识别[J].遥感技术与应用,32(5):931-937.
刘旭霞,秦芮.2021.7.2级地震令海地“摇摇欲坠”[N].环球时报,2021-08-16(2).
牛全福,程维明,兰恒星,等.2010.玉树地震滑坡灾害的遥感提取与分布特征分析[C]//中国灾害防御协会.全国突发性地质灾害应急处置与灾害防治技术高级研讨会论文集.北京:中国灾害防御协会,7.
许冲,戴福初,陈剑,等.2009.汶川MS8.0地震重灾区次生地质灾害遥感精细解译[J].遥感学报,13(4):754-762.
Benjdira B,Khursheed T,Koubaa A, et al.2019.Car detection using unmanned aerial vehicles:Comparison between faster r-cnn and yolov3[C]//2019 1st International Conference on Unmanned Vehicle Systems-Oman(UVS).IEEE,1-6.
Bialas J,Oommen T,Rebbapragada U, et al.2016.Object-based classification of earthquake damage from high-resolution optical imagery using machine learning[J].Journal of Applied Remote Sensing,10(3):036025.
Bochkovskiy A,Wang C Y,Liao H Y M.2020.Yolov4:Optimal speed and accuracy of object detection[J].arXiv preprint arXiv:2004.10934.
Cheng L,Li J,Duan P, et al.2021a.A small attentional YOLO model for landslide detection from satellite remote sensing images[J].Landslides,18(8):2751-2765.
Cheng Z,Gong W,Tang H, et al.2021b.UAV photogrammetry-based remote sensing and preliminary assessment of the behavior of a landslide in Guizhou,China[J].Engineering Geology,289:106172.
Everingham M,Van Gool L,Williams C K I, et al.2010.The pascal visual object classes(voc)challenge[J].International journal of computer vision,88(2):303-338.
He K,Zhang X,Ren S, et al.2015.Spatial pyramid pooling in deep convolutional networks for visual recognition[J].IEEE transactions on pattern analysis and machine intelligence,37(9):1904-1916.
Howard A G,Zhu M,Chen B, et al.2017.Mobilenets:Efficient convolutional neural networks for mobile vision applications[J].arXiv preprint arXiv,doi:10.48550/arXiv.1704.04861.
Howard A,Sandler M,Chu G, et al.2019.Searching for MobileNetv3[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision,1314-1324.
Huang Y,Zhao L.2018.Review on landslide susceptibility mapping using support vector machines[J].Catena,165:520-529.
Kavzoglu T,Colkesen I,Sahin E K.2019.Machine learning techniques in landslide susceptibility mapping:a survey and a case study[J].Landslides:Theory,practice and modelling,283-301,doi:10.10071978-3-319-77377-3-13.
Keyport R N,Oommen T,Martha T R, et al.2018.A comparative analysis of pixel-and object-based detection of landslides from very high-resolution images[J].International journal of applied earth observation and geoinformation,64:1-11.
Lin T Y,Goyal P,Girshick R, et al.2017.Focal loss for dense object detection[C]//Proceedings of the IEEE international conference on computer vision,2980-2988.
Liu W,Anguelov D,Erhan D, et al.2016.Ssd:Single shot multibox detector[C]//European conference on computer vision.Springer,Cham,21-37.
Micheletti N,Foresti L,Robert S, et al.2014.Machine learning feature selection methods for landslide susceptibility mapping[J].Mathematical geosciences,46(1):33-57.
Redmon J,Divvala S,Girshick R, et al.2016.You only look once:Unified,real-time object detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition,779-788.
Redmon J,Farhadi A.2018.Yolov3:An incremental improvement[J].arXiv preprint arXiv:1804.02767.
Ren S,He K,Girshick R, et al.2015.Faster r-cnn:Towards real-time object detection with region proposal networks[J].Advances in neural information processing systems,doi:10.48550/arXiv.1506.01497.
Tien B D,Ho T C,Revhaug I, et al.2014.Landslide susceptibility mapping along the national road 32 of Vietnam using GIS-based J48 decision tree classifier and its ensembles[M]//Cartography from pole to pole.Springer,Berlin,Heidelberg,303-317.
Wang C Y,Liao H Y M,Wu Y H, et al.2020.CSPNet:A new backbone that can enhance learning capability of CNN[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition workshops,390-391.
Wang D,He D.2019.Recognition of apple targets before fruits thinning by robot based on R-FCN deep convolution neural network[J].Trans Chin Soc Agric Eng,35:156-163.
Landslide Recognition After the 2021 Haiti MS7.2 Earthquake Basedon the Improved YOLOv4 Algorithm
FU Rao1,HE Jing1,LIU Gang1,2
(1.School of Earth Sciences,Chengdu University of Technology,Chengdu 610059,Sichuan,China)(2.State Key Laboratory of Geological Disaster Prevention and Geological Environment Protection,Chengdu University of Technology,Chengdu 610059,Sichuan,China)
Abstract
Rapid identification of seismic landslides is important for emergency rescue and loss assessment.On August 14th,2021,a 7.2-magnitude earthquake occurred in Haiti,inducing a large number of landslides.In this paper,the improved YOLOv4 algorithm is used to identify the landslides induced by the Haiti MS7.2 Earthquake using the domestically produced high-fraction 2 images as the data source.To improve the recognition efficiency of the model,the backbone network CSPDarknet53 of Yolov4 is replaced with MobileNetv3,and the ordinary convolution in the YOLOv4 is replaced with depth-separable convolution to optimize the model parameters and network structure.The improved YOLOv4 algorithm achieves 91.37% of the accuracy of target recognition,6.19 f/s(5.24%)higher than the detection speed of the normal YOLOv4,providing more reliable data for emergency rescue and disaster assessment.
Keywords:the YOLOv4 algorithm;the Haiti Earthquake;landslide identification;high resolution image
收稿日期:2022-04-29.
基金項目:国家重点研发计划课题(2021YFC3000401);国家自然科学基金项目(41871303);地质灾害防治与地质环境保护国家重点实验室项目(SKLGP2018Z010);四川省科技计划项目(2021YFG0365);四川省自然资源厅(kj-2021-3);成都市技术创新研发项目(2022-YF05-01090-SN);成都理工大学研究生质量工程项目(2022YJG022).
第一作者简介:付 饶(2000-),硕士研究生在读,主要从事遥感图像处理、目标识别方面研究.E-mail:2276220889@qq.com.
通讯作者简介:何 敬(1983-),博士,副教授,主要从事无人机影像处理、倾斜三维建模及遥感目标自动识别等方面研究.E-mail:xiao00yao@163.com.
付饶,何敬,刘刚.2023.基于改进YOLOv4的2021年海地7.2级地震震后滑坡识别[J].地震研究,46(2):300-307,doi:10.20015/j.cnki.ISSN1000-0666.2023.0012.
