井下受限空间内无人车设计
2023-05-30 15:27张家栋于宝涵蔡子豪徐国瑞高程
时代汽车 2023年1期
张家栋 于宝涵 蔡子豪 徐国瑞 高程


摘 要:为解决井下受限空间内煤炭运输问题,首先通过激光雷达对井下巷道进行定位,构建地图,从而实现路径规划,接着通过MPC(Model Predictive Control)算法进行轨迹跟踪;为保证安全,然后将速度检测,超声波检测等功能集成在无人车上;为了检验实际性能,通过搭建车模进行模拟;运用CarSim(Mechanical Simulation Corporation)对车辆进行优化系统大量参数;最后运用MATLAB实现MPC算法的功能模拟,证明了所设计无人车的可行性,并在仿真平台上进行轨迹仿真,验证了所设计无人车的适用性、稳定性。
关键词:井下无人驾驶 无轨胶轮车 激光雷达检测 模型预测控制
1 引言
煤矿资源作为我国的基本战略能源,是能源结构中的主体,在能源生产和消费中处于主导地位[1]。目前,国家仍然缺乏煤炭资源开采、加工、运输的自动化技术,在很大程度上依然依赖劳动力。一方面,煤矿井下环境恶劣,是安全生产的一定隐患,造成财产损失以及人员伤亡;另一方面矿用无轨胶轮车的不当使用也会导致交通事故的频繁发生,因此迫切需要研究如何提高井下无轨胶轮车的安全性,以减少此类事件的发生。
无人驾驶是一种利用传感器和计算机来到达目的地而不是使用人工交通工具运输的无人驾驶技术,它具有安全性高,效率高,精确度高等特点。目前无人驾驶技术的发展也越来越成熟,已多方面应用于地面车辆。自动驾驶能够减少由于操作失误造成的交通事故,因此自动驾驶技术仍然是国内外自动驾驶领域的热门课题。目前,世界上无人驾驶汽车的研究方向仍然集中在地面道路环境下无人驾驶的车辆、露天运输卡车、矿井电机车等车辆上;无人驾驶技术在矿山开采、井下交通运输等特殊环境中的应用较少。近年来,对煤矿井下环境下的无人驾驶系统应用出现了发展缓慢的现象。井下无轨胶轮车的自动驾驶研究,可有效减少财产损失,提高开采效率,降低运输成本,还可用于井下事故后的应急救援,具有重要的战略价值和广阔的应用前景[2]。
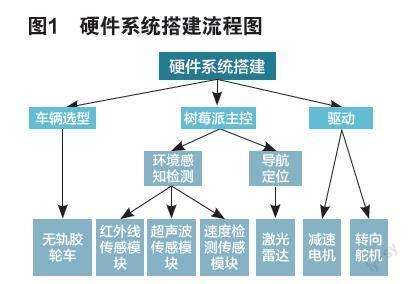
2 硬件搭建及选型
2.1 车模选型
车辆受井下受限空间的非结构化特征影响,即出入空间不规则、动作受限、障碍物多、路面凹凸不平等不可控因素,考虑以上因素,可以选用无轨胶轮车来进行井下运输。其在很大程度上能够减少人力资源的消耗,提高开采及运输的生产效率。
2.2 激光雷达导航
在井下狭窄空间中,开展工程作业与运输作业情况较为复杂,由于巷道狭窄导致作业可施展范围受限且环境较差,光线较暗,综合这些井下情况,对车辆工作来说有着较大的难度。首先要保证的就是,车辆在行进的过程中不會发生碰撞的现象,使用激光雷达生成的点云图,可以帮助进行特征的提取,得出空间信息标定,进而得到坐标,通过最小二乘法等优化方法可以转化为最优解问题,进行数据获取。
激光雷达工作时,通过发射激光束来探测目标物体的位置,速度等特征量。本系统选用思岚一线激光雷达,其发挥的主要功能是对前方道路状况判断和对车辆运动行经扫描,通过控制系统进行判断,得到最优路径。其主要原理是激光发射器在平面内以逆时针270°发射激光束扫描,激光束遇到障碍物后会被反射,传到雷达的接收器后经数字滤波和放大处理后即可得到目标在模拟坐标轴上的坐标信息,根据其周期性平面扫描便可得到其坐标信息从而得到与平面障碍物的距离和大小形状。
2.3 激光雷达在自动驾驶的应用
自动驾驶技术融合了人工智能系统、传感器等多种技术,仍是目前自动驾驶领域研究的热点问题,位列于科技的前沿。早期激光雷达主要用于军事领域,随着人工智能的发展,它逐渐渗透到民用领域,作为高精度传感器,它已成为自动驾驶中不可或缺的器件。同时对激光雷达更高的标准随着自动驾驶发展的迅速也应运而生,小型化,高精度,低成本都是目前自动驾驶技术的主要研究方向,高性能的雷达技术最大限度地提高感知能力,以减少交通事故发生[3]。
2.4 传感器选型
2.4.1 红外线传感器
为了确定车辆在行驶时的姿态和轨迹,通过前一次或多次扫描后获得的轨迹线长度来确定无轨胶轮车的当前位置,由于向不同颜色区域发射的红外线反射回来的光强差别很大,所以红外传感器会以固定频率在周期时间内不停地发射红外线。因处于井下巷道环境中,整体发射目标颜色较深,多为深灰色,对光线能力吸收比较强,因此红外光线遇到白色循迹线就会发生漫反射,不易受到干扰,可以被车内的红外接收器接收,我们判断车辆是否在规划路径上行驶的依据是红外接收器收到信号与否。经对比后,根据井下条件选用红外线传感器型号为E18-D80,该传感器通电后持续发射红外线,在与物体接触后发生反射现象,根据其工作性质,接收器可将反射的光信号转换成电流信号,然后通过放大电路等一系列操作加以识别物体信息。
2.4.2 超声波传感器
超声波传感器的工作原理与前文的激光雷达传感工作原理相似,通过超声波发射器发射信号与超声波接收器接收返回信号的时间差[4]与声速的关系算出与前方物体的距离。经对比后,选择超声波传感器的型号为JSN-SR04T,该传感器在超声波接收器那一端接受到一个10微秒的高电平信号,内部会产生8个周期为0.025ms的方波信号,再通过换能器将方波信号转换成对应的超声波信号。
2.4.3 速度传感器
为了提高井下无轨胶轮车的工作效率,无轨胶轮车的车速如果是恒定的,将很难满足各种各样的工作功能和工作环境要求,因此车速因根据具体情况进行合理设置,所以对无轨胶轮车的速度进行实时控制和监测尤为必要。经过比较,选用了霍尔结构式速度传感器,其原理是把霍尔器件安装在轴上,由于霍尔效应是由于切割磁感线引发的电磁感应所引起的,进而实现电流脉冲信号和磁场脉冲信号的转换,所以轴的速度可通过脉冲产生的频率计算得出。因此选用的速度传感器型号为TD-4008,该传感器具有较强的抗干扰性,可达到20kHZ频率响应,较好适用于井下低速行驶环境。
3 基于MPC算法的轨迹研究
3.1 车辆的动力学模型
为了减少控制算法的计算量,需要将车辆动力学模型作为控制器的预测模型,在对车辆动力学过程更准确描述的基础上对模型简化[5]。由于实际系统中存在不确定因素及外界干扰,使得传统数学模型很难对其实现有效控制。因此在建立车辆动力学模型时,应当做出以下理想化假设:(1)忽略车辆竖直方向运动(2)忽略车辆的悬架特性(3)忽略轮胎横、纵向耦合关系(4)不考虑轮胎的横向载荷转移,并认为轮距相对于转弯半径可以忽略不计,运用单轨模型来描述车辆(5)忽略空气阻力[6]。
最原始的状态变量为横向距离变化率和横摆角速度变化率,输入变量车辆的前轮偏角为。
将上述公式拓展输出变量为,输入变量为新的状态空间方程为
将公式(2)带入公式(3)选取的状态变量,输入变量为
公式(2)和公式(4)将期望横摆角的变化率作为输入,实际上期望横摆角的变化率是一个扰动量。
MPC算法有三个运算步骤:(1)系统未来动态变化的预测;(2)解决优化开环运作;(3)与模型选用无关,采样这个过程是不断进行的,与之同时进行的是将最优解这一部分作用于控制系统,MPC与其他的控制算法不同之处在于控制系统每一次预测都将每个时刻采集到的预测值作为预测未来动态的初始值,通過这来实现实时获取开环优化序列,而传统控制算法构成的控制系统并不能在线得到实时的反馈控制律,与之相比,MPC更像一个动态的控制预测。
他们三个基本特征是:基于模型的预测、滚动优化和前馈-反馈的控制结构。
3.1.1 基于模型的预测
在MPC算法的使用中,对于对象的动态行为模拟必不可少,因此需要建立一个对系统未来进行动态的预测模型。可以将某一时刻状态与控制输入结合到一起,进行对下一个时刻的预测并输出。将下一时刻的输出与本次进行做差,得到误差,经过运算使其实现最小。模型预测作用是研究的重点。
3.1.2 滚动优化
得到模型关于时间的预测输出值后,建立预测下一时刻期望值输出与本次实际值输出之间的差以及输出控制量与对象变化率的目标函数(本次使用二次函数)。通过线性或非线性的二次规划方法从而实现对控制量的最优解,也就是轮偏角。由于初始化模型系统期望的输出是横向偏差和横摆角做差的结果,因此期望初始输出值为0。
3.1.3 前馈-反馈
前馈-反馈是通过比较模型输出与实际对象输出之间的偏差来修正模型的预测输出,这一点在目前的MATLAB 的仿真模拟案例中未能体现出来。
3.2 仿真分析
MPC参数的选择不仅可以影响MPC的控制性能,还会影响其内部时间点在线优化时计算的复杂程度。采样周期的选取过大,那么系统反应的时间过长会导致难以进行及时的修正控制;相反,如果采样周期的选取过小,会造成系统产生大量在线优化计算,造成过大开销。所以建议采样周期选取开环响应时间的十分之一或二十分之一。
4 结语
本文设计了基于MPC算法在井下受限空间下的无人车设计,通过激光雷达对井下巷道进行定位,构建地图,从而实现路径规划,然后通过MPC算法进行轨迹跟踪;为了提高车的性能,还将速度检测,超声波检测等功能集成在了无人运输车上,为了检验实际性能,通过搭建车模进行模拟;运用CarSim对车辆大量参数进行调节;运用MATLAB实现MPC的功能模拟。
尽管本次开发和研究上,已经做了大量的工作,但是由于研发时间急促,系统从硬件设计到软件研发上都还有些许可以改进的地方。例如对于路径规划的方法只尝试了激光雷达,而没有尝试对于摄像头等传感器构建地图;对于MPC算法可以通过熵权法等对权重进行优化;对于此次项目,研究还偏于理论,对于实践因受限于各种现实因素,没能实地进行考察等。
注:项目名称:江苏省创新创业项目支持,项目编号:202113579009Y。
参考文献:
[1] 关莉莉.马克思资源配置理论与我国新能源产业发展研究[M].兰州:西北师范大学,2012.
[2] 骆彬.井下蓄电池无轨胶轮车无人驾驶系统设计研究[M].徐州:中国矿业大学,2019.
[3] 张春蓉.激光雷达在自动驾驶中的技术应用[J].产业与科技论坛,2021,20(21):35-36.
[4] 邴丽媛.基于多传感器融合的无人机自动避障技术研究[M].长春:长春理工大学,2017.
[5]王甜甜.基于联合仿真的智能车辆转向避撞和稳定性联合控制研究[M].西安:长安大学,2018.
[6] 王银,张灏琦,孙前来,李小松,孙志毅.基于自适应MPC算法的轨迹跟踪控制研究[J].计算机工程与应用,2020,57(14):251-258.