基于图像识别的多车编队自动控制系统设计
2023-06-07 05:47胡杰唐笠雄陈昱
电子制作 2023年9期
胡杰,唐笠雄,陈昱
(杭州电子科技大学 电子信息学院,浙江杭州,310018)
0 引言
随着全球人工智能技术的不断提高,智能车辆技术得到了迅速的发展。但面对越来越复杂的交通环境,单个智能车表现出一定局限性,因此,多车协同控制的研究得到学者们广泛的关注[1]。相比于单个智能车,多车协同系统具有更高的工作效率、更灵活的空间分布以及更好的鲁棒性等优势[2],有助于解决道路拥堵、节能环保和交通安全等问题。随着无人驾驶技术的成熟,渐渐无人驾驶领域正在不断扩宽应用面。在实际生活中,多车编队的行驶方式可以节省司机的压力和节约能源,减少废气和废物的排放。多车编队可以通过车辆间通讯,车辆间距离检测,车路协同等方式来实现,并且在很多限定场景中已经得到了实现。本系统使用了蓝牙通信和距离检测等技术,设计了一种基于多车编队的自动控制系统。
1 系统整体方案设计
系统整体方案设计如图1 所示,系统的主控芯片使用沁恒CH32V307VCT6 单片机,CH32V307 是沁恒公司研发的基于 32 位 RISC-V 内核设计的大容量通用微控制器,搭载 V4F 内核,支持单精度浮点指令集,具有更高的运算性能,可以使用RT—Thread 进行嵌入式开发。主频为144MHz,具有丰富的通信、定时器和控制外围电路,充分满足多车编队自动控制系统的设计。该系统通过MCU 将各个模块协同工作,来使得多车编队在不发生碰撞情况下可以快速行驶[3]。

图1 系统整体方案框图
■1.1 摄像头模块
系统使用MT9V032 总钻风摄像头采集和处理图像,MT9V032 总钻风摄像头是一款基于MT9V032 芯片设计的传感器模块,是最适合高速情况下的图像采集的全局快门摄像头。该摄像头FPS 可调,有着高性能动态,可以进行自动曝光(自动曝光开启时),曝光时间随时可调(自动曝光关闭时)。总钻风内部集成了驱动配置芯片,用户不需要自己编写驱动程序。
■1.2 蓝牙组网模块
系统采用CH573 蓝牙组网[4]作为车辆间通信的模块。CH573 是集成 BLE 无线通讯的 RISC-V MCU 微控制器。片上集成低功耗蓝牙 BLE 通讯模块、全速 USB 主机和设备控制器及收发器等丰富的外设资源。CH573 蓝牙组网封装完善,使用串口就可以进行调用,并且通过上位机进行配对,不存在密钥等配置,直接进行通信,收发一体,使用方便,发送距离远,发送位数更多。
■1.3 测距模块
测距模块使用了有来有去超声波模块,该模块是由逐飞公司开发的超声波模块,封装完善。其中有来模块负责接收超声波信息,通过串口读取数据,通过格式下的按位取与读取信息。有去模块负责发送超声波信号,上电后将使能端上拉电平即可使用。
■1.4 编码器
编码器使用1024 线编码器传感器,其用来进行速度检测反馈。由于1024 线进行编码,精度高,灵敏度和准确性更高,对于检测得到的转速信息更加准备。编码器安装在有驱动电机的后轮上,通过齿轮咬合安装来检测转速。
2 车模结构设计
多车编队由三辆小车组成,三辆小车的结构相同,即将同样的车模结构复刻到三辆小车上。主要车模结构是前轮的定位、舵机的安装再加上编码器和摄像头等传感器件的安装和固定共同组成的。完整车模展示如图2 所示。
图2 整车结构图
■2.1 前轮定位调整
前轮是转向轮,它可通过调节主销内倾角、主销后倾角、前轮外倾角和前轮前束等进行调整,如图3 所示。
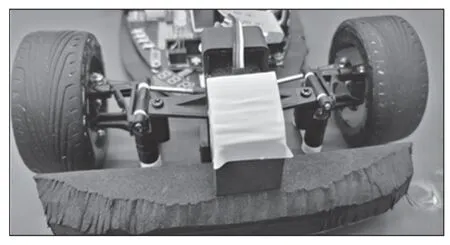
图3 车模前轮定位
(1)主销内倾角
主销内倾角是指主销装在前轴略向内倾斜的角度,它的作用是使前轮自动回正。角度越大前轮自动回正的作用就越强烈,但转向时越费力,轮胎磨损增大。对于模型车,因此汽车的主销内倾角都有一个范围,约5°~8°之间。
(2)前轮前束
前轮前束是指两轮之间的后距离数值与前距离数值之差,也指前轮中心线与纵向中心线的夹角,作用是保证汽车的行驶性能,减少轮胎的磨损。内八字前端小后端大的称为“前束”, 反之则称为“后束”或“负前束”。
■2.2 舵机安装
舵机转向机构在小车的行驶中是极其重要的部分,因此合适的舵机的安装位置和左右横拉杆的长度极大地影响着舵机的灵敏度。为了使舵机转向顺滑,我们选择架高舵机,即在其两侧选用铜柱将其架高并起两侧加固作用,在舵机上下部位加装车模机械组装物件中的铁座并用螺丝固定以此起到舵机上下固定作用。其中需要注意的是,为保证舵机转向精度,铜柱安装打孔时务必要注意左右的对称性。
3 系统硬件电路设计
■3.1 系统电源设计
系统电源电路如图4 所示,本系统使用7.4V 锂航模电池作为供电总电源,设计了三级降压电路为不同外设进行供电。其中5V 供给有来有去超声波模块和MT9V032 总钻风摄像头模块,3.3V 作为单片机、OLED 显示屏和声光提示模块的工作电压。5V 电源选取使用了TI 公司的TPS5450 降压芯片,3.3V 电源选取亚德诺半导体公司的ADM7172 这款线性电源,均具有噪声小,带负载能力强的优点。

图4 系统部分降压电路
■3.2 舵机驱动电路设计
舵机驱动电路如图5 所示,舵机额定工作电压为6.0V,采用TI 公司的TPS5450 降压芯片。单芯片的最大持续输出电流高达5A。输出电压等于1.229×(R1/R2+1),经过计算选取R1=130kΩ,R2=33kΩ。

图5 舵机驱动电路
4 系统软件设计
系统软件流程图如图6 所示,系统收到摄像头传回的图像,进行图像处理,判断道路类型,拟合前进的路线。根据拟合路径与当前的偏差,调整舵机的PWM 输出来调整前进方向和后轮的相应差速。超声波检测与前车之间的距离,不断调整电机输出,来调整速度控制车距。编码器积分路径长度,与判断所得的道路类型一起通过蓝牙传输出去。蓝牙接收到的前车路程与本车的路程对比,大致得到车距,减小超声波的误差影响。根据道路类型,对环岛等特殊道路元素,特殊判断,特殊处理。并且通过设计,使编队可以不碰撞情况下行驶[5]。

图6 系统软件主流程框图
■4.1 图像处理与道理信息提取
4.1.1 二值化处理
通过摄像头每20ms 拍摄一次前面道路,采集到的图像为灰度图,为了方便图像的处理需要进行二值化处理。在这里我们选用大津法来选取灰度阈值来进行黑白二值化处理,在单片机上使用大津且需要在20ms 内完成,对于芯片算力要求过高,不可能保障50 的帧率和完整版的大津并存,所以这里对于大津进行了一定修改。大津算法,也被称作最大类间方差法,是一种可以自动确定二值化中阈值的算法,从类内方差和类间方差的比值计算得来,我们要分离度X 最大,在图像灰度之中遍历0-255,计算所有的分离度,则可以已找到最大的分离度,从而找到最佳的二值化阈值。在这里根据场地限制遍历在0-OstuHigh 之间,再在灰度值抽取时,隔行隔列抽取,代码如图7 所示,保留数据还原度的同时,减少运算量。节约了四分之三左右的运算时间,将原本8ms计算的大津节约到2ms。

图7 下位机大津代码
4.1.2 上位机道路信息提取和拟合
通过编写上位机,搭建了一个仿真编译的环境,再将提取到的二值化后的图像通过串口导入到上位机中,在上位机中编写图像拟合和仿真代码,如图8 所示。根据道路两侧的边线等特征,来分析当前道路类型。道路两侧边线确实严重,则很可能是十字路口。单侧丢线严重,且拟合后曲线方差大,另一侧丢线少,拟合后曲线接近直线,方差很小,可以认为是环岛。寻找到上顶角和左右两侧顶角,那么会认为是分岔路口。识别道路中央的黑白条纹间隙分布,可以分析出斑马线,在斑马线前可以停车等待。根据道路类型,做出对应的拟合,拟合出行驶路径。再将仿真代码移植到下位机中,编队就可以自动寻迹行驶。

图8 上位机仿真拟合
■4.2 防撞系统设计
防撞系统[6]的第一层设计是基于超声波测距,通过有来有去超声波模块,接收到与前车之间的距离信息,距离信息单位是mm,精度很高,通过matlab 拟合速度与距离间的关系,如图9 所示,通过PID 算法调整期望速度,再通过速度环控制电机,实现控距的目标。第二层基于无线通讯传输得到的前车信息,比如前车积分得到的路径值和前方元素信息,如果积分得到的路程与前车传输来的相差较大,也通过调整速度,控制距离。如果前方是斑马线,前车已经停车等待,这时候后车也应该减速至安全距离后停下。
图9 距离与速度曲线拟合
5 系统测试结果与分析
在多车编队的测试中,这是一个调试的过程,通过不断修改PID 参数和图像拟合代码,根据不同道路情况分析处理,来实现多车编队行驶。实测情况如图10 所示。

图10 多车编队实测
最后测试了,30m、40m、50m 道路的实测情况,记录编队的成功情况,以及失败的原因。测试发现系统存在的缺陷在于环岛和十字的相撞问题,随着路程的增长,发生相撞的概率更大[7]。
6 结语
本系统是基于图像识别的多车编队自动控制系统,目标是实现在识别道路自动循迹的基础上实现多车编队,三辆小车间不发生碰撞,并且保持较高的行驶速度。在实际实践中,对于防撞进行了结构和算法上的改良,效果较好。但是仍然存在缺陷,超声波检测距离会存在盲区和一定的误差,导致编队有时候出现碰撞。后续可以通过改进和升级超声波模块,比如使用UWB[8]精准定位。在图像识别上,后车无法完全处理掉前车入镜时候的图像,可能影响寻迹,导致小车行驶不稳定。可以通过涂装前车或者更换芯片性能更好的MCU,以及改进图像处理算法来滤除前车图像的方式来做到。
猜你喜欢
军事文摘(2023年5期)2023-03-27
装备制造技术(2021年4期)2021-08-05
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年3期)2017-11-23
制造业自动化(2017年2期)2017-03-20
红蜻蜓·低年级(2015年11期)2016-02-02
舰船科学技术(2015年8期)2015-02-27
海军航空大学学报(2015年4期)2015-02-27
中国自行车·骑行风尚(2014年4期)2014-10-10