
图像噪点数据的定位与优化
2023-06-13 09:37郭伟方振国
牡丹江师范学院学报(自然科学版) 2023年1期
郭伟 方振国


摘 要:提出一种噪点数据定位及优化滤噪的方法.方法以图像数据存储的行、列位置为X-Y平面,以该位置的灰度值为Z轴,构建三维数据位置与灰度值坐标关系图;将三维坐标分别投影到X-Z平面与Y-Z平面进行噪点数据定位;以定位的坐标边界为有效邻域,设定矩形滑窗进行均衡化处理.实验结果表明,该方法不仅有效的滤除了噪点,还很好地保留了原有图像的细节,实现了噪点数据的定位与优化.
关键词:位置与灰度;数据定位;邻域均衡
[ 中图分类号 ]TP751 [ 文献标志码 ] A
Location and Optimization of Image Noise Data
GUO Wei,FANG Zhenguo
(HuaiBei Normal University Physics and Electronic Information College,Huaibei 235000,China)
Abstract:A method of locating noise data and optimizing noise filtering is proposed.Methods Taking the row and column positions of image data storage as X-Y plane and the gray value of this position as Z axis, a three-dimensional coordinate graph of data position and gray value was constructed.The three-dimensional coordinates were projected to the X-Z plane and the Y-Z plane respectively to locate the noise data.Taking the coordinate boundary of positioning as the effective neighborhood, the rectangular sliding window is set for equalization.The experimental results show that this method can not only effectively remove the noise, but also retain the details of the original image, and realize the localization and optimization of noise data.
Key words:position and grayscale;data positioning;neighborhood balance;
圖像信息数据量大,通常伴有各种干扰信息,对于一些带有均匀噪声的图像,已经有较为成熟的滤波算法对其进行处理.但当图像中出现局部区域有较大噪点时,传统的滤波算法进行滤波处理时效果并不好,且会引起原始图像一些细节丢失,对后续图像的处理应用带来一定的影响.本文提出一种定位噪点数据局部处理方法,以一幅带有较大噪点信息的Lena图像(图1)为研究对象,依据图像信息边界连续的特点,设定[2×2]的滑窗,进行数据的恢复与处理,有效地去除了图像中较大的噪点,保持了原有图像的细节,取得了良好效果.
1 噪点的定位与优化处理方法
首先,对噪点数据定位.将图像信息投影为其位置与灰度值三维坐标图;基于三维坐标图,构建X-Z与Y-Z二维坐标图,利用二维坐标图准确定位噪点区域具体坐标.其次,对噪点数据进行优化.依据具体坐标,规划噪点区域有效临域边界;以平滑的邻域边界值为有效数据,构建矩形滑窗,进行均衡化的处理;使用新的灰度值填充噪点区域数据空间,完成数据的优化与处理.
1.1 噪点数据定位
对Lena图像进行三维坐标构建,以像素数据存储的行、列位置为X-Y平面,以该位置的灰度值为Z轴,如图2所示.将三维图像映射到二维的X-Z平面,如图3所示.由图3可知像素点坐标X在200~250有明显的尖峰突出,将尖峰处放大观察,得到如图4所示的尖峰具体坐标.由图4可知X-Z平面尖峰的具体坐标为X:227-232,将三维的图像映射到二维的Y-Z平面,如图5所示.由图5可知像素点坐标Y在50~100有明显的尖峰突出,将尖峰处放大观察,得到如图6所示的尖峰具体坐标.由图6可知Y-Z平面尖峰的具体坐标为Y:78-83.
1.2 噪点数据的优化
规划邻域边界 图7为噪点区域与其邻域的灰度值数据,黑色部分为噪点区域的灰度值,白色部分为噪点区域邻域的灰度值,可以明显观察出噪点区域的灰度值与其邻域的灰度值有较大的跳变.如图8所示,根据噪点区域的具体位置将噪点的灰度值数据全部取出.
分析邻域数据确定新的灰度值 分析噪点区域的数据,确定新的像素值.采用取噪点数据的三邻域数据和平均值作为新的像素灰度值.[3-7]
如图9所示,令噪点区域的坐标为[(m,n)],灰度值为[f(m,n)],其三邻域的灰度值可以表示为[f(m-1,n-1),f(m-1,n),f(m,n-1)].令处理后的灰度值数据为[g(m,n)],即:
[g(m,n)=13[f(m-1,n-1)+f(m,n-1)+f(m-1,n)]]. (1)
如异常数据[f(m,n)=32]时,其三邻域的灰度值分别为:
[f(m-1,n-1)=205],[ f(m-1,n)=158,][ f(m,n-1)=170].
则在经过处理后的灰度值为:
[g(m,n)=13[f(m-1,n-1)+f(m-1,n)+f(m,n-1)]=13(205+158+170)=177.]
如图10示.
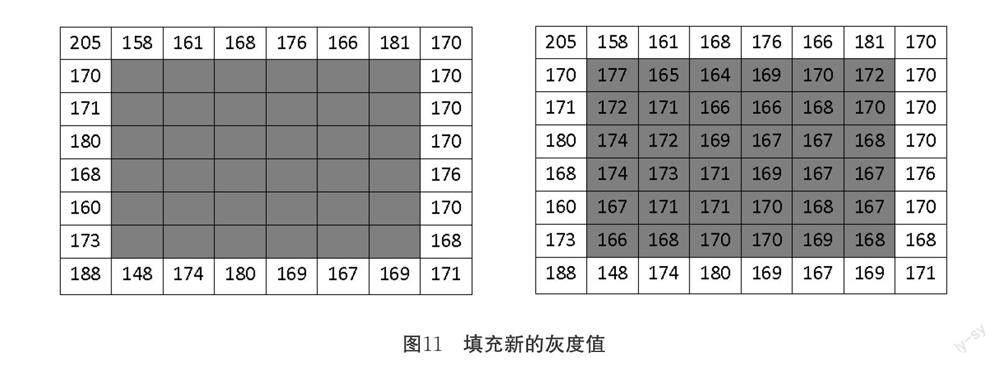
将处理好的灰度值作为下一个异常数据的邻域,进行后续异常数据的计算,在确定好所有新的灰度值后,重新将新的灰度值数据依次回填到噪点区域[8-10](图11).
2 图像显示
将重新处理好的噪点区域的灰度值数据再送到MATLAB软件中进行图像显示,结果如12所示,对比原噪点图片与处理后的结果图可以清楚地看出,该算法不仅有效地去除了噪点,且较好地还原出原始图像,保留了原始图像的大部分细节,完全达到设计要求.
3 结束语
利用MATLAB软件设计了一种快速准确定位图像污染并处理的系统,该方法处理速度快,占用资源较少,方法设计简单.实验证明,该设计具有良好的性能.通过先准确定位置,然后对图像进行局部处理,保留了图像本身的细节,完全达到了实验要求.
【参考文献】
[1]关雪梅. 几种图像平滑处理方法比较研究[J]. 牡丹江师范学院学报:自然科学版, 2016(4):3.
[2]王晓东, 王荣芝. 傅立叶变换在图像处理中的应用[J]. 牡丹江师范学院学报:自然科学版, 2003(3):3.
[3]劉光宇, 曹禹, 黄懿,等. 基于BP神经网络结构的图像压缩技术研究[J]. 牡丹江师范学院 学报:自然科学版, 2021(2):23-29.
[4]崔少华, 赵庆平. 独立分量分析法去噪的研究与应用[J]. 牡丹江师范学院学报:自然科学 版, 2016(2):3.
[5]吴静,周先春,徐新菊,黄金.三维块匹配波域调和滤波图像去噪[J].计算机科学,2020,47(07):130-134.
[6]曹义亲, 谢舒慧. 基于网格搜索的特定类别图像去噪算法[J]. 计算机科学, 2020, 47(11):6.
[7]李辉, 吴传生, 刘俊,等. 基于梯度曲面面积与稀疏约束的图像平滑方法[J]. 计算机应用, 2021, 41(7):9.
[8]杨良健, 周先春, 崔程程,等. 基于旋转块的BM3D图像去噪改进算法[J]. 电子测量技术, 2021, 44(22):6.
[9]淡州阳, 刘粉林, 巩道福. 基于差分直方图中尾部信息的平滑滤波检测算法[J]. 计算机科学, 2021(5):234-241.
[10]杨心雨, 李参海, 龚国辉,等. 残差最小化的遥感影像边缘锐化[J]. 遥感信息, 2021, 36(4):9.
编辑:琳莉
