夜间道路标线亮度对驾驶行为的影响研究
2023-06-15 06:02赵鲁华徐小倩亓建锋仉元野
物流科技 2023年9期
关键词:速度
赵鲁华 徐小倩 亓建锋 仉元野

摘 要:通过设计仿真场景进行标线亮度对驾驶行为影响的模拟实验,对所获取的驾驶模拟行驶速度、横向位移、方向盘转角数据进行分析,并对速度和横向位移与夜间标线亮度之间进行模型拟合,建立恰当的数学模型关系。模拟实验结果表明,随着夜间标线亮度的降低,行驶速度与横向位移会降低,方向盘转角变化更频繁、变化幅度也越大,因此,夜间标线亮度会对驾驶行为产生一定的影响。
关键词:驾驶模拟;标线亮度;速度;横向位移;方向盘转角
中图分类号:F506 文献标志码:A
DOI:10.13714/j.cnki.1002-3100.2023.09.020
Abstract: The simulated driving speed, lateral displacement and steering wheel angle data were analyzed by designing a simulation scenario to simulate the effect of line brightness on driving behaviour, and a proper mathematical model relationship was established by fitting the model between speed and lateral displacement and line brightness at night. The results of the simulation experiments show that as the brightness of the night marker decreases, the simulated driving speed and lateral displacement will decrease, and the steering wheel turning angle will change more frequently and to a greater extent, therefore, the night marker brightness will have some influence on driving behaviour.
Key words: driving simulation; marker brightness; speed; lateral displacement; steering wheel turning angle
0 引 言
道路標线作为一种常见交通基础设施,向交通参与者传递着重要的交通信息。在夜间,更需要有足够的可视性为驾驶员提供信息,保障驾驶行为安全,而标线在夜间的亮度则体现在标线的逆反射性能。标线的逆反射过程是指车辆灯光照在标线上并反射回驾驶员眼睛中的过程,逆反射程度取决于逆反射系数,逆反射系数越高,逆反射能力越强。对此,国内外学者进行了标线亮度对驾驶行为的相关研究分析。Horberry等人通过模拟夜间潮湿驾驶条件下的标线相对有效性,表明增强标线能够更好地让参与者保持车道位置和速度[1]。Babic D, Cajner H等人通过是否包含道路标线的驾驶模拟实验分析夜间条件下驾驶员的行为,结果表明,标线能够提供及时的信息,从而使参与者调整驾驶行为[2]。张开冉等人通过行车实验表明,在夜间时边缘标线能够促进驾驶行为[3]。
据统计,道路标线能够提高30%以上的运输效率,且对交通事故的影响很大,相关概率高达70%,因此道路标线对交通安全非常重要[4]。以上学者的分析研究道路标线对交通安全的影响具有很大的启发作用,夜间标线亮度会对驾驶行为的各项指标,如行驶速度、方向盘转角、横向位移、加速度等产生影响。而本文通过模拟夜间干燥驾驶条件下的不同等级的标线亮度对速度、横向位移以及方向盘转角的影响,通过分析模拟实验结果来确定参与者最佳夜间标线的亮度范围,为安全合理的实际道路标线施划提供理论依据。
1 驾驶模拟实验设计
(1)实验设备:驾驶模拟器,Prescan仿真,matlab2018。
(2)实验人员:参与者20人,视力良好或矫正视力良好。
(3)驾驶模拟环境搭建:通过咨询专家意见,可以通过调整车辆灯光不同的照射距离和位置来调整驾驶员前方标线的不同亮度,达到标线不同逆反射水平的效果,以此来代表不同的标线逆反射系数。由于公路行业交验评标准F80/1将标线逆反射系数标准划分为4个等级,因此场景共设置4个实验路段对应4个等级,路段标号依次为a、b、c、d,对应关系为路段a
≥450mcd·m-2·lx-1、路段b≥350mcd·m-2·lx-1、路段c≥250mcd·m-2·lx-1、路段d≥150mcd·m-2·lx-1,标线亮度依次递减。每段路长设置为500米,为保证只有标线逆反射一个影响因素,只提供车辆远光灯一种光源,不设置其他影响因素。
(4)实验方法:①驾驶员熟悉模拟驾驶约10分钟;②每人进行一次实验;③设置数据记录频率为0.05s,收集模拟驾驶过程中速度、横向位置、方向盘转角等数据。
环境搭建3D模型的驾驶员视角如图1所示。
2 实验数据分析
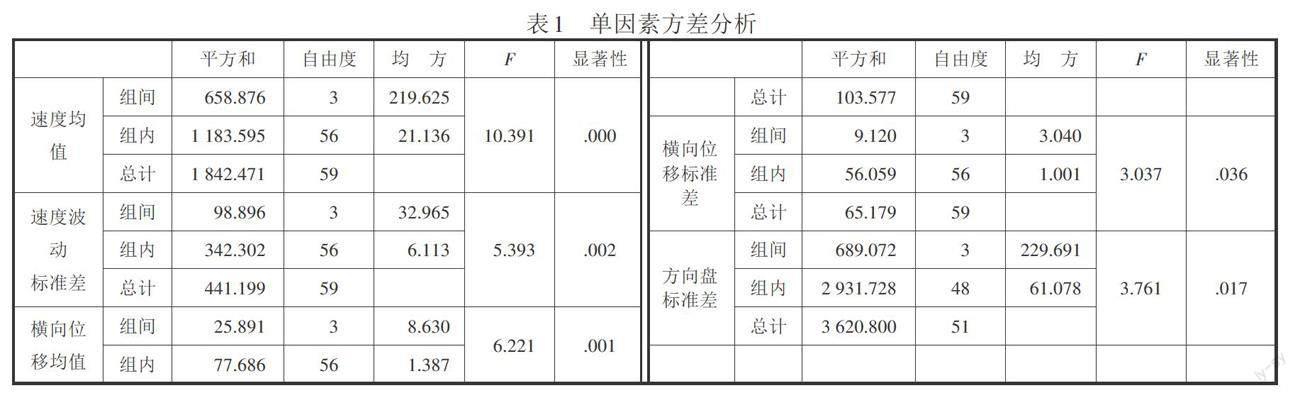
通过对模拟实验数据进行单因素方差分析(ANOVA),置信度为95%,得到20名参与者的各表征数据组间、组内的均方比值及显著性水平如表1所示,其均方比值F值排序:速度均值>横向位移均值>速度波动标准差>方向盘标准差>横向位移标准差,说明驾驶人在各路段速度差异较大,整体平稳性适中,各路段的横向位移差异较大。总体而言,各指标数据在不同路段存在一定差异,符合统计学规律P<0.05,说明对4个研究路段的划分合理。
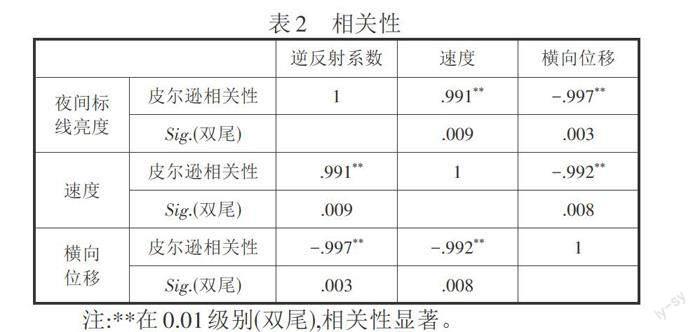
为确定夜间标线亮度与驾驶行为各指标之间的相关性,是否存在线性关系,对其进行相关性分析,检验结果如表2所示。夜间标线亮度与每路段行驶速度均值、横向位移均值之间的相关系数分别为0.991、-0.997,其在置信度(双侧)为0.01时,相关性是显著的,因此可以认为夜间标线亮度与不同路段的行驶速度均值、横向位移均值具有显著性的相关关系,且与速度均值成正相关、与横向位移之间为负相关。同时看出,每路段平均速度与横向位移平均值之间的相关系数为-0.992,因此在置信度(双侧)为0.01时,其内部的相关关系是显著的,即可认为驾驶员在进行速度变化的过程中会伴随着横向位置的偏移。
2.1 车辆速度分析
车辆速度能够反映车辆的行驶状态,4个实验路段的车辆驾驶模拟过程中速度均值变化如图2所示。整体来看,随着4个实验路段标线亮度的变暗,参与者平均速度逐次降低。进入b路段之后,标线亮度降低一个等级,速度均值随之降低11%;进入c、d路段之后,标线亮度依次降低一等级,速度均值分别降低15.7%、26.6%。结果表明,模拟驾驶实验过程中,标线亮度变暗会影响行驶速度。
2.1.1 数据模型拟合
选择67%的数据,用其每段路速度平均值的均值与夜间标线亮度进行曲线拟合,模型摘要和参数估算值结果如表3所示。其中显著性均小于显著性水平0.05,而二次模型、幂函数模型拟合R方值均为1,幂函数模型的显著性为0.000,综合考虑,选择最优的幂函数模型。
指数模型的相关系数检验结果如表4所示,其各参数B分别为0.431、11.494,且显著性水平均为0.000,明顯小于显著性水平0.05,因此可认为选择的幂指数模型正确。其计算模型见式(1),式中Y表示每段路速度,R表示夜间标线亮度。由模型可知,速度与夜间标线亮度之间呈正相关性,与前述相关性分析相对应。
Y=11.494R (1)
将式(1)变换得到式(2),如下:
lnY=ln11.494+0.431lnR (2)
2.1.2 模型验证
用剩余33%数据的均值进行模型验证,定义实际值与预测值相对误差δ<3%即可证明模型有效,其中:
δ= (3)
式中:A为预测值,E为实际值。经验证可知,剩余数据的4个路段速度均值的相对误差分别为1.8%、2.1%、2.4%、2.2%。因此,拟合模型有效。
2.2 横向位移分析
横向位移能够反映出驾驶员在行驶过程中的方向保持性,整个过程中的车辆横向位移均值如图3所示。整体来看,标线亮度会对模拟驾驶的横向偏移量产生一定影响,随着夜间标线亮度的变暗,横向位移也逐渐增加。
2.2.1 数据模型拟合
同2.1.1节所示模型拟合过程,利用67%的横向位移数据,通过每段路的横向位移平均值的均值与夜间标线亮度进行曲线拟合,模型摘要和参数估算值如表5所示。其中二次函数、逆函数、幂函数、S函数模型的显著性均大于显著性水平0.05,因此可排除。而指数函数模型的R方值为0.979,高于对数函数模型的R方值0.966,因此选择最优的指数函数模型。
指数函数模型的系数检验结果如表6所示,参数B为-0.454、3.668,显著性水平为0.01、0.016,均小于显著性水平0.05,因此选择的指数模型正确,计算模型如式(4)。式中:Y为每个路段的横向位移,R为逆反射系数。由模型可知,逆反射系数与横向位移之间呈负相关,与前述相关性分析相对应。
Y=3.668e (4)
将式(4)变换可得到式(5),如下:
lnY=ln3.668-0.454R (5)
2.2.2 模型验证
将33%的横向位移数据通过式(3)验证模型有效性,经检验,4个路段的横向位移相对误差分别为2.3%、2.5%、2.1%、2.7%。因此,拟合模型有效。
2.3 方向盘转角分析
2.3.1 变化过程分析
整个行驶过程中的方向盘转角统计结果如表7所示。方向盘转角的变化能够更直观地反映出驾驶员操作行为,参与者在模拟驾驶过程中的方向盘转角变化过程如图4所示。结果显示,方向盘转角在整个过程中不断变化,且在一定范围内波动。方向盘转角的波动区间可由式(6)确定。
-σ≤M≤+σ (6)
式中:M為方向盘转角波动范围;为方向盘转角平均值;σ为方向盘转角标准差。
参与者在4个实验路段行驶的方向盘标准差如表8所示。由表8可知,a实验路段由于起步原因,稳定性较差;b、c、d实验路段的方向盘标准差增大,说明参与者行驶的稳定性越来越差。
由图4可知,在约第60s开始进入正常行驶状态,第140s、250s、380s时分别进入下一路段。在进入下一路段节点前方向盘转角开始波动频繁,说明参与者在此时已经看到标线亮度变暗,在进入下一路段之前就开始操作方向盘调整车辆行驶状态,相较于路段上行驶过程中的方向盘转角变化更为频繁、转动幅度也较大,甚至超出波动区间。在标线亮度逐次变暗的节点时,方向盘转角的转动幅度也一次比一次更大。
相关研究显示,驾驶员在高速路上直线行驶时,其方向盘转角的范围基本上在±7°之间[5-6],而此次驾驶模拟实验所得到的方向盘转角区间基本在此范围之内,除了临近节点变化时会有个别值超出区间范围。由此看来标线亮度的变化会对参与者驾驶行为产生一定的影响,且标线亮度越暗,产生的影响越大。
2.3.2 变化率指标
在正常行驶过程中,车辆的方向盘转角是相对平缓的,而频繁转动方向盘的行为一般是不安全的,在此,通过方向盘转角变化率指标,即方向盘转角在单位时间内的变化,来评价标线亮度变化对参与者行为的影响程度。
M= (7)
式中:M为方向盘转角变化率;mi+1、mi为实验所导出的方向盘转角,Δt为采样间隔,取0.05s。
根据式(7)所得到的a、b、c、d 4个路段上参与者的转角变化率结果如表9所示。
方向盘转角变化率可以较好地反映夜间标线亮度变化对驾驶员的影响程度。由表9可知,随着标线亮度的下降,方向盘转角变化率也在增大,表明参与者在模拟驾驶过程中受到标线亮度变化的影响,在单位时间内调整方向盘的次数和幅度增加,c、d实验路段的方向盘转角变化率明显高于a、b实验路段,说明使用亮度太暗的标线,会对驾驶行为造成过度的影响,影响行车安全。
3 结 论
(1)随着夜间标线亮度的降低,参与者的行驶速度也随之降低。
(2)夜间标线亮度的变化会影响参与者驾驶的横向位移,且随着标线亮度变暗,横向位移增加。
(3)参与者在4个路段正常行驶时,方向盘转角相对平稳,但在标线亮度发生变化时,方向盘转角变化较为频繁,随着标线亮度的降低,方向盘转角变化率及其转动幅度增大。
实验结果表明,在夜间道路标线的亮度会对参与者的驾驶行为产生一定影响,包括行驶速度、横向位移、方向盘转角等,从而在一定程度上影响行车安全。综合考虑此次驾驶模拟实验的3个指标结果,可以选择b实验路段标线亮度对应的逆反射系数,即450mcd·m-2·lx-1>R≥350mcd·m-2·lx-1,以此达到行驶稳定性,保障行车安全。但是在实际道路标线施划时,要考虑其在夜间对驾驶的影响,但仅依靠对此3个指标的分析是不够的,还要综合考虑对其他指标的影响以及道路环境、驾驶人等各项因素来合理选择标线的逆反射系数。
参考文献:
[1] HORBERRY T, ANDERSON J, REGAN M A. The possible safety benefits of enhanced road markings: A driving simulator evaluation[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2006,9(1):77-87.
[2] BABIC D, BABIC D, CAJNER H, et al. Effect of road markings and traffic signs presence on young driver stress level, eye movement and behaviour in night-time conditions: A driving simulator study[J]. Safety, 2020,6(2):24.
[3] 张开冉,陈刚. 道路边缘线对驾驶行为影响的研究[J]. 人类工效学,2001(3):15-17,70.
[4] 马静洁,黄磊. 道路交通标线可视性研究[J]. 中国标准化,2018(20):169-173.
[5] 李啸,鲍际平,王猛猛,等. 直线行驶过程中汽车方向盘转角的研究分析[J]. 道路交通与安全,2008,8(5):43-46.
[6] 祝站东,荣建,周伟. 不良天气条件下的驾驶行为研究[J]. 武汉理工大学学报(交通科学与工程版),2010,34(5):1040-1043.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-25
车迷(2022年1期)2022-03-29
中学生百科·大语文(2021年4期)2021-05-12
军事文摘(2020年18期)2020-10-27
作文周刊·小学二年级版(2019年12期)2019-04-26
车迷(2018年11期)2018-08-30
中学生数理化·八年级物理人教版(2017年1期)2017-03-25
发明与创新(2016年5期)2016-08-21
智慧少年(2016年2期)2016-06-24
小雪花·成长指南(2015年10期)2015-10-23