
平板遥控监控拍照四足机器人的设计
2023-06-17 08:39杜建诚李茹芸黄恒一
物联网技术 2023年6期
杜建诚,李茹芸,张 韩,王 兆,黄恒一
(三亚学院,海南 三亚 572022)
0 引 言
仿真四足机器人同时结合了仿真机器人和四足机器人的优点,设计结构合理简单、肢体协调、稳定性好,其仿生结构有着天然的优越性,可以模拟四足动物的运动形式来适应不同的地形环境,同时又具有仿形化以假乱真的特点,相比人而言,仿真四足机器人能够在较为复杂工作环境中较好地隐蔽自身,并且能够较好适应环境,顺利完成特定任务。本文在此研究基础上设计了一款简易的通过平板遥控监控拍照四足机器人[1]。
1 设计方框图
本文设计的仿真四足机器猫以Arduino nano及配套扩展板为基础,包含蓝牙模块、监控模块、定位模块、电源模块、舵机模块和倾斜传感器模块[2]。图1为设备的系统整体设计框架图。
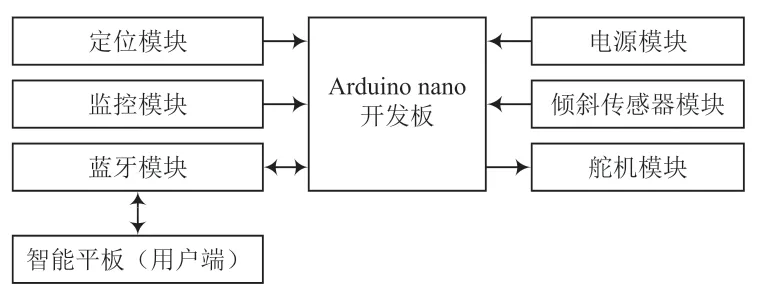
图1 系统设计方框图
2 硬件设计
硬件设计上,该设计以猫为仿生对象,模拟猫的生物形态,搭载Arduino nano 及配套扩展板,内含蓝牙模块、定位模块、电源模块、舵机模块、倾斜传感器和监控模块。在进行操作时候,用户可以通过平板打开专用Android 应用程序,并在APP 上开启蓝牙功能与四足仿真机器猫连接。在APP上就可以控制机器猫前后左右的移动,开启监控模块摄像头时可以获得实时传输画面[3]。
2.1 主控芯片
该智能四足仿真机器猫使用了Arduino nano 系列芯片,具体型号为Arduino nano v3.2。Arduino nano为Arduino USB 接口的微型版本,其主控芯片采用的处理器核心为ATmega328(Nano3.0),该芯片具有轻量化、低功耗、便于安装等优点。图2为Arduino nano 芯片实图[4]。
图2 Arduino nano 实图
2.2 定位模块
本文选用的定位模块为一款微型嵌入式设备,其通过磁力固定在仿真四足机器猫电池盒下。该设备内置定位芯片,可以接收GPS 信号。在手机、平板、计算机等平台上可以查看机器猫的运动轨迹,并获取机器猫的实时位置,能够获取到较为精确的定位,在后面调试过程中起到不少帮助。图3是该微型嵌入式设备实物图[5]。

图3 定位模块实物图
2.3 监控模块
监控模块由WiFi 数传模块和高清摄像头组成。具体工作过程如下,高清摄像头拍摄实时监控画面传给数传模块,WiFi 数传模块再将画面传输手机或者平板中。WiFi 数传模块供电电压为5 V,驱动电流为1 A,搭载64 MB RAM 储存,配备一个USB 接口,天线上搭载大功率板载天线,通过TTL 串口进行通信。高清摄像头模块通过USB 接口与数传模块相连,其供电电压为5 V,像素为30 万,输出帧率为30 f/s,支持手动调焦。图4和图5分别为高清摄像头和WiFi 数传模块实物图[6]。

图4 高清摄像头实物图

图5 WiFi 数传模块实物图
3 软件设计
在软件设计与具体功能开发上,使用到了下面四款软件,包括Proteus 8 Professional、Java、APP Inventor2、Arduino 1.8.13。由于在硬件上使用Arduino nano 及配套开发板,所以使用Arduino 1.8.13 进行编程。在该软件可以对机器猫的动作进行编程控制,在完成程序编写以后可直接烧录到机器猫中。具体电路设计上使用到Proteus 8 Professional。在控制APP 的开发上,使用APP Inventor2 进行开发。在设计操作界面上,通过设计几个简单的按钮,以完成复杂的功能;在APP打包上,仅需导入机器猫的控制源码,就能生成打包APK 软件[7]。
3.1 程序流程
在程序流程上,机器猫以APP Inventor2 软件开发的APP 应用程序为基础,智能手机或者平板通过蓝牙连接,完成机器猫与控制端设备的配对。完成设备配对后,可以发出舵机位置校对命令,调节机器猫的平衡性,使机器猫的运行更加稳定;完成舵机调节,发送前、后、左、右的控制命令,就可以完成机器猫前后左右的移动。图6为程序流程。
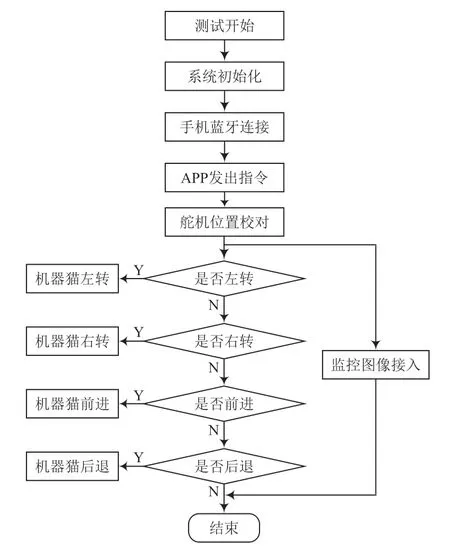
图6 程序流程
3.2 Arduino 开发系统
该软件为Arduino nano开发板的配套软件,是一款方便、简单的开源电子平台,兼容主流的操作系统,对Linux 也有不错的兼容性,使用的语言是C 语言。在Arduino 上编写程序,再转换成二进制文件,通过数据线可烧录到机器猫中的Arduino nano 芯片中,即可完成具体功能的实现[8]。图7为Arduino 代码实图。
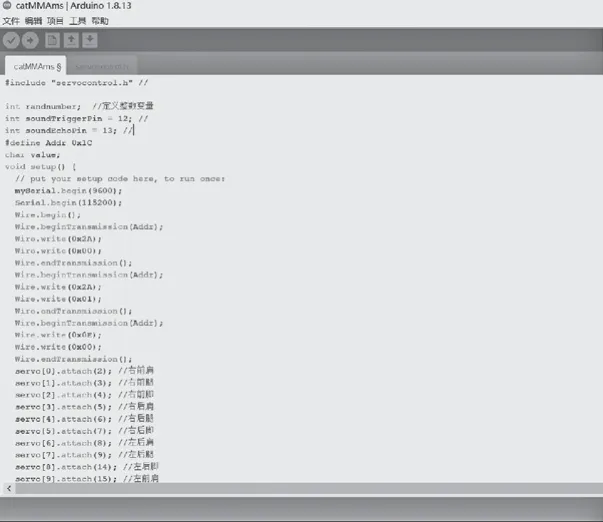
图7 Arduino 代码实图
3.3 APP Inventor2 程序设计
开发的APP 程序所利用的APP Inventor2 平台,需用到谷歌账号进行开发,受国内某些政策影响,无法正常通过谷歌账号进行使用。但所幸也可通过广州市教育信息中心服务器完成开发,通过邮箱或者QQ 登录http://app.gzjkw.net/login/网络地址。登录后,点击新建项目按钮,输入项目名称Cat_Robot,即完成APP 前期的准备工作。具体设计上,该APP 开发分为界面设计和逻辑设计两部分[9]。图8为程序开发平台项目建立。
图8 程序开发平台项目建立
4 系统调试与分析
4.1 系统调试
在完成好仿真四足机器猫的硬件设计和软件部分程序的设计后,进入到系统调试的环节。在完成设备及配套模块组装后,就需要对设备进行功能测试。具体测试内容包括APP连接控制测试、GPS 定位模块测试和监控模块测试。
4.2 GPS 模块测试
下面进入到GPS 模块的测试中,将GPS 模块安装在仿真机器人的电池盒下面。该模块带有磁铁,能够和仿真机器猫紧密相连。打开GPS 模块,在提示灯红灯慢闪30 s 后就完成上线。继续在平板打开定位软件,接收到模块发送过来的信号,可以在地图上清晰见到仿真机器猫的位置。图9为测试阶段机器猫的实时位置[10]。

图9 实时位置图
4.3 监控模块测试
监控模块是机器猫的重要组成部分,机器人上的摄像头用来采集和记录来自机器人的实时视频[10]。在实际操作时,摄像头将拍摄到画面传送到WiFi 数传模块。WiFi 数传模块通过WiFi 将画面传到APP 界面上,完成对周围环境的监控。为了拍摄的稳定性,摄像头需要进行加固,避免画面虚化。图10为监控测试拍摄实图。
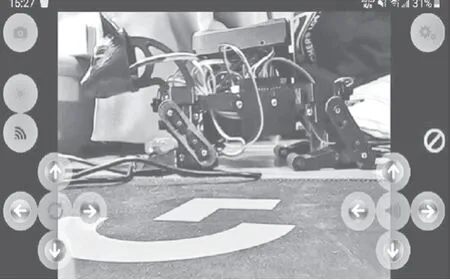
图10 监控测试拍摄实图
5 结 语
本文设计的仿真四足机器人利用平板等操控设备通过蓝牙与仿真机器猫的蓝牙模块相连,进而使用机器猫控制APP,完成机器猫前后左右的移动。配备的定位模块可以精准显示仿真机器猫的实时位置,监控模块可以实时在操控设备上显示周围情况,便于使用者做出实时判断。测试结果表明,本文设计的四足仿真机器人拥有良好的协调性、对地形不错的适应性以及仿形化所带来出色的隐蔽性,能够执行人所不能完成的危险任务。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
计算机测量与控制(2021年8期)2021-08-23
载人航天(2019年1期)2019-03-07
电子测试(2018年13期)2018-09-26
小猕猴学习画刊(2017年10期)2017-10-31
学生天地(2017年24期)2017-02-17
电子器件(2015年5期)2015-12-29
航天器工程(2014年5期)2014-03-11
发明与创新(2013年29期)2013-03-11
