基于遥控操作的自动化旋耕机设计
2023-06-21 05:00叶青青杨璐菲
南方农机 2023年13期
叶青青 ,杨璐菲
(天门职业学院,湖北 天门 431700)
土壤自动化耕作既是农业发展的重要管理措施,也是现代农业可持续发展的核心环节。科学的土壤自动化耕作能够有效调节土壤状态,具有恢复耕层结构、提升土壤保墒能力等效果[1]。现阶段,天门农业自动化耕作采用拖拉机改进与后悬挂式两种旋耕机形式,在作业时存在劳动强度高、工作效率低及漏耕等问题,甚至还需二次补耕,既影响到作物生长,又对作物根茎部分产生了一定程度的伤害。针对这些问题,借鉴国内外旋耕机设计理念,结合天门实际耕作情况,研究团队研发出一种遥控自动化旋耕机,该机具不仅具有开沟、中耕、除草、碎土、起垄、回填等部件功能,还可有效避让作物与障碍物,避免了漏耕、少耕等问题的出现,实现了农业生产链的机械化管理,对农业可持续发展具有积极意义。
1 结构设计
旋耕机具有极强的碎土能力,作业后地表平坦,在农业领域得到了广泛应用[2]。遥控自动化旋耕机基于机械操控,将电控系统与机械技术进行结合,其由底盘、驱动装置、遥控系统、液压系统等部件构成,整体结构如图1所示。
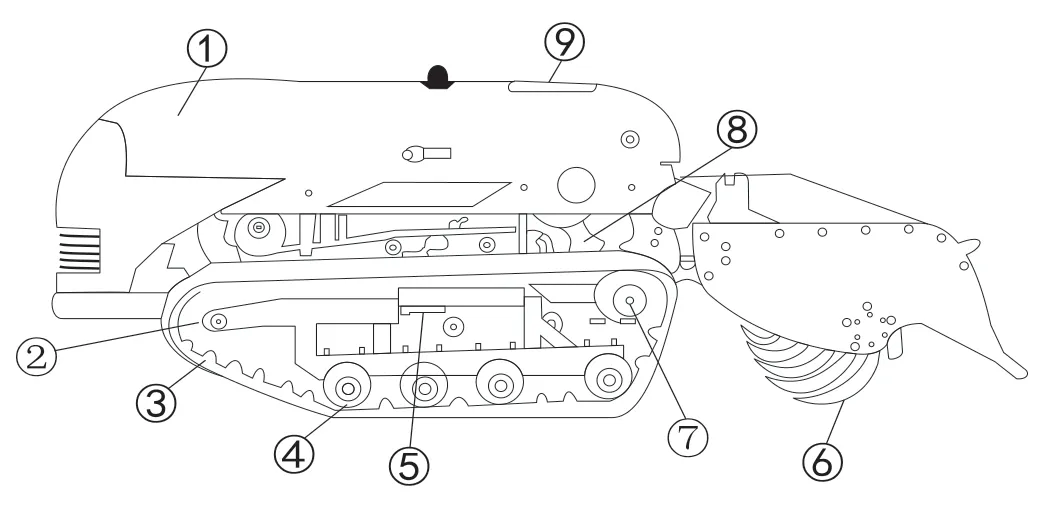
图1 整体结构
1.1 底盘设计
如图2 所示,底盘由机架、驱动轮、转向轮、支撑轮、履带等部件组成。机架为整体机架,安装遥控试验机的发动机、变速箱、传输装置等;驱动轮固定于机架右上方,与变速箱相连,与转向轮横向;机架底部有一对支撑轮用于支撑车辆,履带环绕于驱动轮与转向轮,由转向轮后的履带张紧器负责调节松紧[3]。遥控自动化旋耕机行驶原理是由变速箱传输动力到驱动轮,驱动轮再驱动履带进行运动,转向轮负责调整方向,履带转动时带动支撑轮,并将机体重量平均分布于履带上。
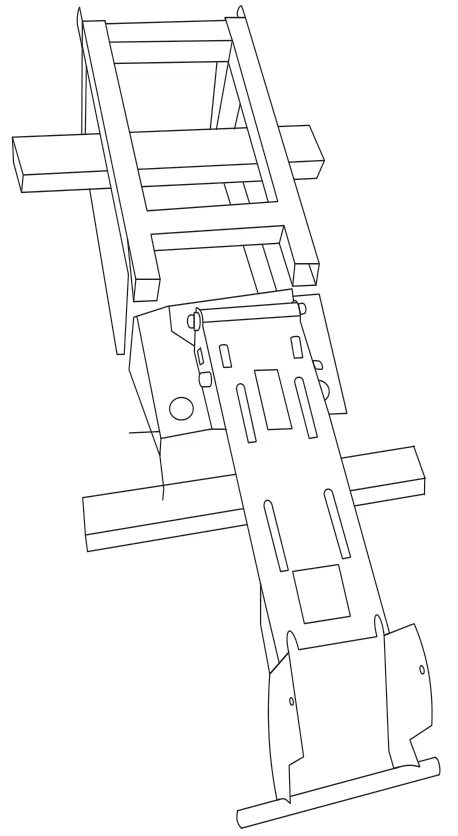
图2 底盘结构
1.2 驱动装置
遥控自动化旋耕机的动力源是柴油发动机,发动机通过三角带将动力传输至变速箱,由离合器控制变速箱与皮带轮的合离。在设计时,传输动力经变速箱后分多路传出,其中一路是驱动单元,通过变速器将动力传输至驱动轮,驱动轮驱动履带后带动转向轮与支撑轮,由此驱动机具行驶[4]。变速箱手柄控制各挡,实现速度与进退的转换,驻车时则通过控制离合将变速箱与皮带轮分离。另外一路是挂接单元,由于旋耕装置是试验机的配套部件,所以应将动力传输口与旋耕机的变速箱相连,从而实现刀轴转停与驻停的控制。
1.3 遥控系统
遥控系统发射器型号为TB-901,接收器型号为SPC-SFMC-X2214A,具体接线情况如图3 所示。发射器采用点动按键,负责油门、转向、升降、转停等控制操作。发射器设有急停按键,以便遇到突发情况时紧急停止。如果长时间无需进行点动可进行键位锁定,通电后应先点按解锁键[5]。挡位切换时应点按“分离”按键,接收器接到指令后发送给液压系统,推动液压杆分离离合器,并手动切换到当前所需挡位。
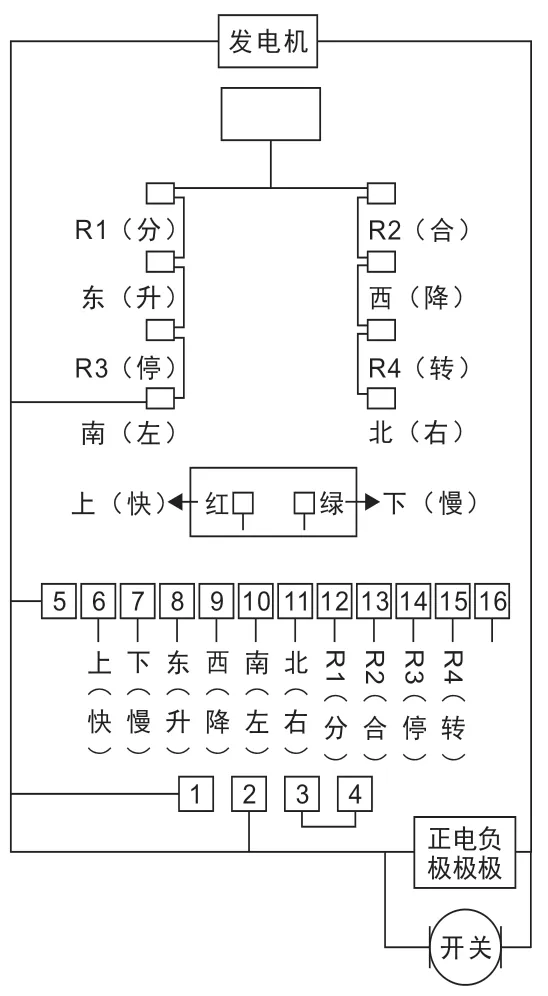
图3 SPC-SFMC-X2214A接线形式
1.4 液压系统
遥控自动化旋耕机液压系统由油箱、滤网、液压泵、泵阀油管等构成,依靠液压系统工作,进行配套件升降,具体结构设计如图4 所示。在行驶过程中,按下转向(左或右)按钮,接收灯亮[6]。同时,左转向阀的指示灯随之亮起,接通左转向油缸油路,活塞杆推动摇臂,带动左分离拨叉,切断左侧动力后进行转向。松开后所有指示灯熄灭,油缸回到初始,机具沿直线行驶[7]。驻车后接收器、左转向阀及右转向阀的指示灯亮起,左右转向油缸伸出后推动摇臂分离,从而实现停车。

图4 液压系统设计
1.5 电控系统
采用GJ1103电控油控器,负责调节发动机转速并控制油门大小,实现行驶过程中的速度控制。电控系统由单片机、电机、电位器等部件构成,电控油门驱动发电机带动钢丝运动实现油控,电控连接方式如图5所示。接线完成后调试电控油门,确保升降速信号无效[8]。电源接通后钢丝会降至下限,将油门调控手柄置于怠速位置,并将钢丝固定于手柄之上。外接电位器调至最高处,内置电位器调至最低处,为了让升速有效,应将手柄拉至设定处,调节内置电位器,直至手柄调到高速[9]。此时,对外接电位器进行调整,手柄在下限与设定处之间移动,让降速信号保持有效。

图5 电控连接方式
2 性能测试
2.1 测试环境
遥控自动化旋耕机功能效果测试流程包括转弯半径测试、接地压力测试、旋耕深度测试三项内容。测试地点为湖北天门某农业站。测试土壤肥力中等,周边植被覆盖率较高,土壤含水率18.13%,土壤穿透阻力300 kPa,地块较为规整,整体面积约150 m×80 m。
2.2 转弯半径
遥控自动化试验机未接挂旋耕机,将试验机置于空旷地面,挂接1 挡,控制最小油门,在平齐试验机前端与右端处划线,长按遥控左转向按键,试验机转一圈后计算转弯半径,测试重复6 次计算均值。由测试可知,遥控自动化旋耕机最小转弯半径为1.69 m,如表1所示。

表1 转弯半径测试
2.3 接地压力
测试接地压力是为了了解机具整体对土壤的接地压力,具体方法是计算旋耕机重量与驱动装置接地面积的比值[10]。将试验机解挂旋耕机,测定重量时发动机应处于满油状态。在空旷场地测算履带接地长度与履带宽度,可用公式表示为:
式中,g表示接地压力,w为遥控自动化旋耕机整体重量,a为机具两侧履带宽度之和,b为履带接地长度。遥控自动化旋耕机整体重量为680 kg,各履带宽度为0.24 m,两侧履带宽度之和为0.48 m,履带接地长度为1.02 m,计算后可知接地压力为13.32 kPa。
2.4 旋耕深度
在测试区内沿机具行驶方向每隔3 m 两侧各设1点,保持记录7次,计算旋耕深度,可用公式表示为:
式中,d表示旋耕深度,dn表示第n点的旋耕深度,s表示测定次数。表2 为遥控自动化旋耕机旋耕深度测试数据,导入公式后可得出旋耕深度均值为11.93 cm。

表2 旋耕深度测试
3 结语
综上所述,根据旋耕机作业质量与工作效率,设计了一种遥控自动化旋耕机,将电控技术、液压技术与机械技术集于一体[11-12]。遥控自动化旋耕机由遥控发射器发送信号,接收器接收信号后,实现对转动与液压等系统的相关控制,完成旋耕机行驶、转向、升降等远程操作,减少扬尘与农药对操作者的危害,降低工作强度[13-14]。实地测试表明,该遥控自动化旋耕机能够实现原地转向,转弯半径小,机体结构均衡,具有较大的接地压力,旋耕深度适宜。但由于转弯半径测试结果与测试土壤的穿透阻力、含水率以及肥力具有直接关系,因此在不同土壤会表现出差异化的转弯半径,后续研究应重点关注该方面内容,实现测试环境的多样化。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
哈尔滨轴承(2020年2期)2020-11-06
哈尔滨轴承(2020年1期)2020-11-03
农民致富之友(2020年17期)2020-06-19
中国新技术新产品(2020年4期)2020-05-05
科技创新导报(2016年27期)2017-03-14
现代农机(2016年4期)2016-09-18
湖北农机化(2016年5期)2016-03-08
实用手外科杂志(2015年4期)2015-08-27